También podría gustarte
- COMPLEMENTODocumento12 páginasCOMPLEMENTOelectronico49Aún no hay calificaciones
- Apunte 1Documento11 páginasApunte 1electronico49Aún no hay calificaciones
- Eliminacion Gauss Jordan PDFDocumento1 páginaEliminacion Gauss Jordan PDFelectronico49Aún no hay calificaciones
- JACOBIDocumento1 páginaJACOBIelectronico49Aún no hay calificaciones
- Eliminacion Gauss Jordan PDFDocumento1 páginaEliminacion Gauss Jordan PDFelectronico49Aún no hay calificaciones
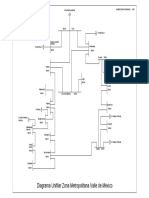
- Diagrama ZMVMDocumento1 páginaDiagrama ZMVMelectronico49Aún no hay calificaciones
- Programa MatlabDocumento3 páginasPrograma Matlabelectronico49Aún no hay calificaciones
- Diagrama LagunaDocumento1 páginaDiagrama Lagunaelectronico49Aún no hay calificaciones
- Estrategia de PivoteoDocumento15 páginasEstrategia de PivoteoMartin Vertiz100% (1)
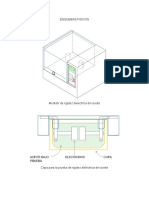
- Rigidez DielectricaDocumento2 páginasRigidez Dielectricaelectronico49Aún no hay calificaciones
- Eliminacion Gauss Jordan-2Documento1 páginaEliminacion Gauss Jordan-2electronico49Aún no hay calificaciones
- T 13Documento1 páginaT 13electronico49Aún no hay calificaciones
- ADMINISTRACIÓN Tema 1Documento5 páginasADMINISTRACIÓN Tema 1electronico49Aún no hay calificaciones
- Examen PDFDocumento4 páginasExamen PDFelectronico49Aún no hay calificaciones
- Examen PDFDocumento4 páginasExamen PDFelectronico49Aún no hay calificaciones
- Guia Ing Eco 1erDocumento1 páginaGuia Ing Eco 1erelectronico49Aún no hay calificaciones
- T 11Documento2 páginasT 11electronico49Aún no hay calificaciones
- Guia Ing Eco 1erDocumento1 páginaGuia Ing Eco 1erelectronico49Aún no hay calificaciones
- Control de Reporte Ciencia y TecnologiaDocumento15 páginasControl de Reporte Ciencia y Tecnologiaelectronico49Aún no hay calificaciones
- Gómez Servín Fernando 8EV1 T-12 Mapa Conceptual de Clasificación de CostosDocumento2 páginasGómez Servín Fernando 8EV1 T-12 Mapa Conceptual de Clasificación de Costoselectronico49Aún no hay calificaciones
- T 14Documento2 páginasT 14electronico49Aún no hay calificaciones
- Gómez Servín Fernando 8EV1 T-10 Cuadro Sinóptico de La Contabilidad de CostosDocumento2 páginasGómez Servín Fernando 8EV1 T-10 Cuadro Sinóptico de La Contabilidad de Costoselectronico49Aún no hay calificaciones
- Examen HumanidadesDocumento6 páginasExamen Humanidadeselectronico49Aún no hay calificaciones
- T 5Documento2 páginasT 5electronico49Aún no hay calificaciones
- Rigidez DielectricaDocumento2 páginasRigidez Dielectricaelectronico49Aún no hay calificaciones
- Archivo 2Documento2 páginasArchivo 2electronico49Aún no hay calificaciones
- IDEASDocumento4 páginasIDEASelectronico49Aún no hay calificaciones
- Control de Reporte PosmodernidadDocumento3 páginasControl de Reporte Posmodernidadelectronico49Aún no hay calificaciones
- Desarrollo de La PracticaDocumento4 páginasDesarrollo de La Practicaelectronico49Aún no hay calificaciones
- Actividad 1 AlDocumento8 páginasActividad 1 AlJosz ValdezAún no hay calificaciones
- Polinomio CaracterísticoDocumento2 páginasPolinomio Característicoleticia vegaAún no hay calificaciones
- Sistemas de EcuacionesDocumento36 páginasSistemas de EcuacionesDayanna MarquezAún no hay calificaciones
- Guía de Aprendizaje - Extrapolacion de Richardson para IntegralesDocumento3 páginasGuía de Aprendizaje - Extrapolacion de Richardson para IntegralesFiLiPh TORWOLFAún no hay calificaciones
- Unidad Ii - Algebra LinealDocumento19 páginasUnidad Ii - Algebra LinealJuan Rios DavilaAún no hay calificaciones
- Método SimplexDocumento8 páginasMétodo SimplexAbril MAún no hay calificaciones
- Actividad 4 - Ceros Método GráficoDocumento4 páginasActividad 4 - Ceros Método GráficoTatiana PeñaAún no hay calificaciones
- Ecuación de LegendreDocumento5 páginasEcuación de Legendrefelix ronyAún no hay calificaciones
- Parábolas y Ecuación CuadráticaDocumento11 páginasParábolas y Ecuación CuadráticaAlexandraAún no hay calificaciones
- Trabajo de Metodos NumericosDocumento4 páginasTrabajo de Metodos NumericosluisAún no hay calificaciones
- NIv. Gestión - S06s1 - Monomios - PolinomiosDocumento1 páginaNIv. Gestión - S06s1 - Monomios - PolinomiosGianeyra Caichihua YactayoAún no hay calificaciones
- Guía de Trabajo III UnidadDocumento12 páginasGuía de Trabajo III UnidadNicole LopezAún no hay calificaciones
- Tarea 2 Búsqueda de RaícesDocumento50 páginasTarea 2 Búsqueda de RaícesDiego CarreonAún no hay calificaciones
- Inecuaciones de Grado SuperiorDocumento33 páginasInecuaciones de Grado SuperiorNIEVEZ NATALIA ESPINOZA CANDENASAún no hay calificaciones
- Practica de AlgebraDocumento2 páginasPractica de AlgebraCUSSIAún no hay calificaciones
- Problemas de AplicacionDocumento14 páginasProblemas de AplicacionNadia Cruz SantiagoAún no hay calificaciones
- Control de LecturaDocumento22 páginasControl de LecturaFernando GarciaAún no hay calificaciones
- Aporte Al Foro Unidad 2Documento7 páginasAporte Al Foro Unidad 2Yicel Morelo poloAún no hay calificaciones
- MonomiosDocumento1 páginaMonomiosJorge Hugo CárcamoAún no hay calificaciones
- Polinomios 4°Documento27 páginasPolinomios 4°Isabela JrzAún no hay calificaciones
- Taller 2Documento2 páginasTaller 2enrique gutierrezAún no hay calificaciones
- Lab IIIDocumento11 páginasLab IIIEduar AnayaAún no hay calificaciones
- 2.2 Caso 2 Método SimplexDocumento14 páginas2.2 Caso 2 Método SimplexBrenda MoranAún no hay calificaciones
- Proyecto Final Métodos NuméricosDocumento8 páginasProyecto Final Métodos NuméricosAlavi Perez Luis CarlosAún no hay calificaciones
- Diferenciacion e Integracion NumericasDocumento10 páginasDiferenciacion e Integracion NumericasFanny AlorAún no hay calificaciones
- Secuencia Ciclo OrientadoDocumento33 páginasSecuencia Ciclo OrientadoLisandra EspinosaAún no hay calificaciones
- 4B 03 Presentacion Polinomios y Fracciones AlgebraicasDocumento29 páginas4B 03 Presentacion Polinomios y Fracciones AlgebraicasDaniel GonzálezAún no hay calificaciones
- Cuestionario Unidad II Métodos NuméricosDocumento2 páginasCuestionario Unidad II Métodos NuméricosFernando MontoyaAún no hay calificaciones
- Ejercicio 3 Metodo Simple DualDocumento16 páginasEjercicio 3 Metodo Simple DualJerson Villalobos OlayaAún no hay calificaciones
- Tema 2 - Introducción Al Cálculo Numérico - PreliminaresDocumento22 páginasTema 2 - Introducción Al Cálculo Numérico - PreliminaresRobert Salazar ValverdeAún no hay calificaciones