También podría gustarte
- Metodo ColocaciónDocumento4 páginasMetodo ColocaciónJuan Diego CarvajalAún no hay calificaciones
- Trabajo 2. Diseño de Elementos de Maquina (Cadena)Documento28 páginasTrabajo 2. Diseño de Elementos de Maquina (Cadena)Juan Diego CarvajalAún no hay calificaciones
- Cadena SeleccionadaDocumento1 páginaCadena SeleccionadaJuan Diego CarvajalAún no hay calificaciones
- Engranajes Helicoidales1Documento32 páginasEngranajes Helicoidales1Juan Diego CarvajalAún no hay calificaciones
- Hoja de ProcesosDocumento1 páginaHoja de ProcesosJuan Diego CarvajalAún no hay calificaciones
- Cálculo de Cadena de TransmisiónDocumento1 páginaCálculo de Cadena de TransmisiónJuan Diego CarvajalAún no hay calificaciones
- Notas Transmisión Por CadenaDocumento3 páginasNotas Transmisión Por CadenaJuan Diego CarvajalAún no hay calificaciones
- ENGRANAJES1Documento48 páginasENGRANAJES1Juan Diego CarvajalAún no hay calificaciones
- Selección de BandasDocumento20 páginasSelección de BandasJuan Diego CarvajalAún no hay calificaciones
- Engranajes Rectos1Documento50 páginasEngranajes Rectos1Juan Diego CarvajalAún no hay calificaciones
- Transmisión Por Correas 20212aDocumento73 páginasTransmisión Por Correas 20212aJuan Diego CarvajalAún no hay calificaciones
- Transmisión Por Cadena 20212aDocumento68 páginasTransmisión Por Cadena 20212aJuan Diego CarvajalAún no hay calificaciones
- Copia de Inspección - Visual PDFDocumento1 páginaCopia de Inspección - Visual PDFJuan Diego CarvajalAún no hay calificaciones
- ParcialDocumento2 páginasParcialJuan Diego CarvajalAún no hay calificaciones
- Cámara APS y DSLRDocumento9 páginasCámara APS y DSLRJuan Diego CarvajalAún no hay calificaciones
- Discontinuidades y defectos en soldaduraDocumento100 páginasDiscontinuidades y defectos en soldaduraJuan Diego CarvajalAún no hay calificaciones
- Guia de Laboratorio #2 Transistores y Ampificadores Sem2021-2Documento5 páginasGuia de Laboratorio #2 Transistores y Ampificadores Sem2021-2Juan Diego CarvajalAún no hay calificaciones
- ParcialDocumento3 páginasParcialJuan Diego CarvajalAún no hay calificaciones
- Tabla de contenido y resumen del capítulo 3 sobre tipos de soldaduraDocumento167 páginasTabla de contenido y resumen del capítulo 3 sobre tipos de soldaduraJuan Diego CarvajalAún no hay calificaciones
- Laboratorio # 1 Diodos y RectificaciónDocumento4 páginasLaboratorio # 1 Diodos y RectificaciónJuan Diego CarvajalAún no hay calificaciones
- Api EndDocumento27 páginasApi EndJuan Diego CarvajalAún no hay calificaciones
- Resumen ExpoDocumento2 páginasResumen ExpoJuan Diego CarvajalAún no hay calificaciones
- APIDocumento5 páginasAPIJuan Diego CarvajalAún no hay calificaciones
- Notas Capítulo 2Documento79 páginasNotas Capítulo 2Juan Diego CarvajalAún no hay calificaciones
- Api End - 3Documento40 páginasApi End - 3Juan Diego CarvajalAún no hay calificaciones
- Vdocuments - MX Electricidad Basica Tomo 1Documento88 páginasVdocuments - MX Electricidad Basica Tomo 1Jose Daniel Mendez GarciaAún no hay calificaciones
- EXPO Api577Documento13 páginasEXPO Api577Juan Diego CarvajalAún no hay calificaciones
- Historia Medieval 14 01 PDFDocumento14 páginasHistoria Medieval 14 01 PDFNoelia TorresAún no hay calificaciones
- WPS PrecalificadoDocumento20 páginasWPS PrecalificadoJuan Diego CarvajalAún no hay calificaciones
- Cómo Hacer.. Cargador SolarDocumento31 páginasCómo Hacer.. Cargador SolarShara Roy SahoriAún no hay calificaciones
- HT ADocumento5 páginasHT ATania YAún no hay calificaciones
- NS-090 Protección de Tuberías en Redes de Acueducto y AlcantariDocumento18 páginasNS-090 Protección de Tuberías en Redes de Acueducto y AlcantariOscar GuerreroAún no hay calificaciones
- Manual Pinza Digital DT 3341Documento8 páginasManual Pinza Digital DT 3341Bernabe YeraAún no hay calificaciones
- Guia de VideoTutoriales HeTProDocumento89 páginasGuia de VideoTutoriales HeTProCristian Q. RodríguezAún no hay calificaciones
- 04 Calculos Justificativos Rs - El MangoDocumento36 páginas04 Calculos Justificativos Rs - El MangoCARLOS GONZALES UNOAún no hay calificaciones
- Probador de Bobinas y Módulos de EncendidoDocumento66 páginasProbador de Bobinas y Módulos de EncendidoAbel MancillaAún no hay calificaciones
- FDTD SIMULATIONDocumento13 páginasFDTD SIMULATIONsanchezmsnAún no hay calificaciones
- Fundamentos para La Radio AficionDocumento447 páginasFundamentos para La Radio AficionGabito SaltosAún no hay calificaciones
- Practica 1.Documento8 páginasPractica 1.Rita SalazarAún no hay calificaciones
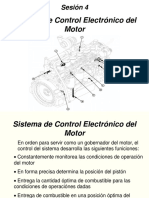
- 052 - Sistema de Control Electrónico Del MotorDocumento30 páginas052 - Sistema de Control Electrónico Del MotorNikole SanchezAún no hay calificaciones
- Práctica2-Prueba de Vacio en Maquinas AsincronasDocumento4 páginasPráctica2-Prueba de Vacio en Maquinas AsincronasAlex PintadoAún no hay calificaciones
- Tablero de DistribucionDocumento11 páginasTablero de DistribucionEduardo Perez100% (3)
- Corrientes eléctricas automotrizDocumento14 páginasCorrientes eléctricas automotrizAndrés Edisson Águila100% (1)
- Informe Senati N4Documento3 páginasInforme Senati N4Christopher LoArAún no hay calificaciones
- Informe FiltrospasabajosDocumento28 páginasInforme Filtrospasabajoscss_unacAún no hay calificaciones
- CT-PT009 Medidas y Vigilancia de Las Instalaciones de Puesta A TierraDocumento32 páginasCT-PT009 Medidas y Vigilancia de Las Instalaciones de Puesta A TierraMauricio Leyton Otarola0% (1)
- Supernodo y SupermallaDocumento21 páginasSupernodo y SupermallaSebastianHerreraBetancurAún no hay calificaciones
- Inf - Practica 10FDocumento4 páginasInf - Practica 10FSäntŷ ḺḓṷAún no hay calificaciones
- Esp Rev0104 T222MLDocumento10 páginasEsp Rev0104 T222MLdionisioAún no hay calificaciones
- Dimmer EQUIPO DINAMITADocumento3 páginasDimmer EQUIPO DINAMITAgerardo rios mezaAún no hay calificaciones
- INFORME #5 - Electricidad y MagnetismoDocumento4 páginasINFORME #5 - Electricidad y MagnetismoMax SalasAún no hay calificaciones
- Lab 200 FisDocumento1 páginaLab 200 FisFany XoriaAún no hay calificaciones
- Informe Práctica 4Documento14 páginasInforme Práctica 4Daniel CabreraAún no hay calificaciones
- Manual Del Multimetro UnitDocumento14 páginasManual Del Multimetro UnitJesus Ignacio Calle PerezAún no hay calificaciones
- Manrique Se PDFDocumento92 páginasManrique Se PDFAnielaAún no hay calificaciones
- TrabajoEnGrupo InformeN2Documento13 páginasTrabajoEnGrupo InformeN2Kevin OrtizAún no hay calificaciones
- Termodinámica CorrosiónDocumento6 páginasTermodinámica CorrosiónHernandezbAngie100% (1)
- TeSys D - TeSys Deca Control - Tallas 1 - 2 y 3 - LC1D150M7Documento7 páginasTeSys D - TeSys Deca Control - Tallas 1 - 2 y 3 - LC1D150M7mgferreyraAún no hay calificaciones
- Protección y maniobra en tableros eléctricosDocumento51 páginasProtección y maniobra en tableros eléctricosRaul HERNÁNDEZAún no hay calificaciones