También podría gustarte
- Desarrollo de interfaces gráficas en Python 3 con TKINTERDe EverandDesarrollo de interfaces gráficas en Python 3 con TKINTERCalificación: 5 de 5 estrellas5/5 (2)
- Ejercicios Capitulo 5Documento9 páginasEjercicios Capitulo 5Fabricio CalapiñaAún no hay calificaciones
- Las matemáticas en la vida real: introducción básica al modelamiento matemáticoDe EverandLas matemáticas en la vida real: introducción básica al modelamiento matemáticoAún no hay calificaciones
- Media, Varianza y Desviación EstandarDocumento7 páginasMedia, Varianza y Desviación EstandarEdwin Geovanny Moreira HazAún no hay calificaciones
- Folleto Starsoft Gold 2020Documento16 páginasFolleto Starsoft Gold 2020Alicia AcuñaAún no hay calificaciones
- Laboratorio 3Documento4 páginasLaboratorio 3ANDRES FELIPE0% (2)
- Guia de Practica 13Documento5 páginasGuia de Practica 13ANGELA SHANTHAL MALDONADO PRADO0% (1)
- Andrango Espinoza Munoz Raza Tarea2.1Documento17 páginasAndrango Espinoza Munoz Raza Tarea2.1DavidAún no hay calificaciones
- Andrango Espinoza Munoz Raza Tarea 2.1Documento24 páginasAndrango Espinoza Munoz Raza Tarea 2.1DavidAún no hay calificaciones
- Reporte Practica 2, Grupo 6Documento3 páginasReporte Practica 2, Grupo 6GeraldineAún no hay calificaciones
- Interpretación de Las GraficasDocumento7 páginasInterpretación de Las Graficasluis centeno fawcettAún no hay calificaciones
- Carta de Control XR Peso de CamaronDocumento2 páginasCarta de Control XR Peso de CamaronJosé Miguel Gonzalez PihuaveAún no hay calificaciones
- Tarea # 2 Probabilidad y EstadisticaDocumento15 páginasTarea # 2 Probabilidad y Estadisticarrr03Aún no hay calificaciones
- Lunes 9-11 Movimiento Rectilineo Uniformemente Acelerado InformeDocumento5 páginasLunes 9-11 Movimiento Rectilineo Uniformemente Acelerado InformeJuliana Valenzuela0% (1)
- Informe 3Documento5 páginasInforme 3Loquendo LexanyAún no hay calificaciones
- Ciencias Basicas FisicaDocumento8 páginasCiencias Basicas FisicaKaritho KaxaxAún no hay calificaciones
- Reporte 08Documento6 páginasReporte 08Camila CofreAún no hay calificaciones
- UsjsDocumento3 páginasUsjsCamiloxxxAún no hay calificaciones
- Guia de Trabajo Aplicativo n2Documento11 páginasGuia de Trabajo Aplicativo n2SHEYLA PATRICIA AMANCIO AMPUEROAún no hay calificaciones
- Ajuste de Una RectaDocumento3 páginasAjuste de Una RectaGabriel Carvajal RuedaAún no hay calificaciones
- Relacion Funcional Del Proceso de Descarga de Un CondensadorDocumento6 páginasRelacion Funcional Del Proceso de Descarga de Un CondensadorJuanpi SotoAún no hay calificaciones
- Algebra Lineal de LoorDocumento17 páginasAlgebra Lineal de LoorCristopher Zavala ChaconAún no hay calificaciones
- Resolución de Ejercicios - 2Documento5 páginasResolución de Ejercicios - 2Milenka Sabrina Vinces CusmeAún no hay calificaciones
- Trabajo Final - Ley de CoulombDocumento5 páginasTrabajo Final - Ley de CoulombAlejandro FreireAún no hay calificaciones
- Pruebas de Bondad de Ajuste - EjerciciosDocumento10 páginasPruebas de Bondad de Ajuste - EjerciciosYonerChávezBurgosAún no hay calificaciones
- Taller 8 Calor y OndasDocumento6 páginasTaller 8 Calor y OndasDulce Manosalva FuentesAún no hay calificaciones
- Guía Laboratorio Ley de CoulombDocumento11 páginasGuía Laboratorio Ley de CoulombMiguel David Gafaro gonzalezAún no hay calificaciones
- T1Documento9 páginasT1Sara Melisa Bustamante MonsalveAún no hay calificaciones
- Movimiento rectilíneo uniformemente variadoDocumento7 páginasMovimiento rectilíneo uniformemente variadoPaul MantillaAún no hay calificaciones
- Tarea YordyDocumento8 páginasTarea YordyDaniel UlloaAún no hay calificaciones
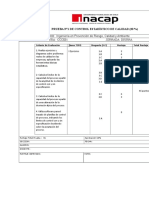
- Análisis estadístico de calidad de procesos productivosDocumento5 páginasAnálisis estadístico de calidad de procesos productivosdanielaAún no hay calificaciones
- Informe MRU OrganizedDocumento10 páginasInforme MRU OrganizedDENISSE ORDOÑEZ PINTOAún no hay calificaciones
- 21-22-23 Ava° clase-ALGORITMO LERCH GROSSMAN-teoria-procedimiento - CalculosDocumento7 páginas21-22-23 Ava° clase-ALGORITMO LERCH GROSSMAN-teoria-procedimiento - CalculosYandirPaitanAún no hay calificaciones
- SPT at Proy Nº1Documento14 páginasSPT at Proy Nº1bsalfateAún no hay calificaciones
- Empleados Analisis ClusterDocumento14 páginasEmpleados Analisis ClusterDayana Agudelo MalagonAún no hay calificaciones
- Determinar valores atípicos mediante Grubbs, Dixon y cajas y bigotesDocumento9 páginasDeterminar valores atípicos mediante Grubbs, Dixon y cajas y bigotesJefferssonFlorezMenesesAún no hay calificaciones
- 2° Matematicas - Cuadernillo Remedial - AlumnoDocumento19 páginas2° Matematicas - Cuadernillo Remedial - AlumnoMulato Chagal0% (1)
- Relación entre horas de capacitación y errores cometidosDocumento10 páginasRelación entre horas de capacitación y errores cometidosEdwin RamosAún no hay calificaciones
- Disco de MaxwellDocumento4 páginasDisco de MaxwellNayua Del ValleAún no hay calificaciones
- Laboratorio 3Documento9 páginasLaboratorio 3Andres PASCAGAZAAún no hay calificaciones
- TRABAJO COLABORATIVO ProbabilidadDocumento18 páginasTRABAJO COLABORATIVO ProbabilidadandersonAún no hay calificaciones
- Algoritmo para Sistemas de EcuacionesDocumento16 páginasAlgoritmo para Sistemas de Ecuaciones'David Reza0% (1)
- Analisis Leyes de Biot SavartDocumento4 páginasAnalisis Leyes de Biot SavartMaria sanjuanAún no hay calificaciones
- 3.3 Test de Bondad de Ajuste - EjerciciosDocumento16 páginas3.3 Test de Bondad de Ajuste - EjerciciosOros Romano CrhistianAún no hay calificaciones
- Practica 3 Unidad Seis SigmaDocumento22 páginasPractica 3 Unidad Seis SigmajorgeAún no hay calificaciones
- Movimento Rectilíneo Uniforme AceleradoDocumento11 páginasMovimento Rectilíneo Uniforme AceleradoMargory AguilarAún no hay calificaciones
- Taller de Repaso Previo Al Examen Del 2do Ciclo 2022 P1Documento10 páginasTaller de Repaso Previo Al Examen Del 2do Ciclo 2022 P1Doris Elizabeth Mieles BasurtoAún no hay calificaciones
- Campo Eléctrico - Práctica - Peña Juan JoséDocumento2 páginasCampo Eléctrico - Práctica - Peña Juan JoséJuAn José PeñaAún no hay calificaciones
- Laboratorio Circuito RCDocumento4 páginasLaboratorio Circuito RCCosas variasAún no hay calificaciones
- 2022 tp8 Regresion y Correlacion Ejercicios ResueltosDocumento5 páginas2022 tp8 Regresion y Correlacion Ejercicios ResueltosJazmín Malén RossiAún no hay calificaciones
- Luis - Elgueta - Control4Documento6 páginasLuis - Elgueta - Control4Luis ElguetaAún no hay calificaciones
- Cinematica N°2Documento3 páginasCinematica N°2Lautaro MoranAún no hay calificaciones
- 4eso Mat-BDocumento55 páginas4eso Mat-BJuan kikoAún no hay calificaciones
- Consolidacion Unidimensional de SueloDocumento9 páginasConsolidacion Unidimensional de SueloMarvin BonethAún no hay calificaciones
- PRACTICA3Documento8 páginasPRACTICA3Edison HerreraAún no hay calificaciones
- Tarea 2 - 100408 - 154 - Carlos Enrique Parra CastañedaDocumento21 páginasTarea 2 - 100408 - 154 - Carlos Enrique Parra Castañedacarlos parraAún no hay calificaciones
- Tarea 2 - Tomas Rojas - Retroalimentación.Documento7 páginasTarea 2 - Tomas Rojas - Retroalimentación.Tanhy JrAún no hay calificaciones
- Método de Mínimos Cuadrados.Documento11 páginasMétodo de Mínimos Cuadrados.José Eduardo Cruz SánchezAún no hay calificaciones
- Trabajo de Estadistica Inferencial 2009 para El Compañero Alvaro 2009PRUEBAS DE KRUSKALWALLIS Y FREADMANDocumento17 páginasTrabajo de Estadistica Inferencial 2009 para El Compañero Alvaro 2009PRUEBAS DE KRUSKALWALLIS Y FREADMANJORGE LUIS MAYA ALEMANAún no hay calificaciones
- Datos ExperimentalesDocumento21 páginasDatos ExperimentalesMichelle Betancur GutierrezAún no hay calificaciones
- Análisis gráfico de funciones no linealesDocumento4 páginasAnálisis gráfico de funciones no linealesDanielRestrepoAún no hay calificaciones
- Engranes: definición, tipos y cálculo de involutasDocumento33 páginasEngranes: definición, tipos y cálculo de involutasDavidAún no hay calificaciones
- Andrango David DeberesDocumento10 páginasAndrango David DeberesDavidAún no hay calificaciones
- Proyecto Tercer ParcialDocumento10 páginasProyecto Tercer ParcialDavidAún no hay calificaciones
- Realizar Una Consulta Sobre El Tema deDocumento4 páginasRealizar Una Consulta Sobre El Tema deDavidAún no hay calificaciones
- Informe Practica Nº3Documento7 páginasInforme Practica Nº3DavidAún no hay calificaciones
- INFORME1Documento6 páginasINFORME1DavidAún no hay calificaciones
- Medición de variables eléctricas mediante métodos directos e indirectos en circuito implementadoDocumento5 páginasMedición de variables eléctricas mediante métodos directos e indirectos en circuito implementadoDavidAún no hay calificaciones
- Medición de variables eléctricas mediante métodos de diferenciaDocumento7 páginasMedición de variables eléctricas mediante métodos de diferenciaEddy Sambache100% (1)
- Ultimo PrepaDocumento5 páginasUltimo PrepaDavidAún no hay calificaciones
- Castillo Tipantuna Edwin Alexander Laboratorio8 2751Documento7 páginasCastillo Tipantuna Edwin Alexander Laboratorio8 2751DavidAún no hay calificaciones
- Ultimo InformeDocumento7 páginasUltimo InformeDavidAún no hay calificaciones
- Informe Practica Nº1Documento6 páginasInforme Practica Nº1Eddy FernandoAún no hay calificaciones
- Informe de Digitales 3Documento4 páginasInforme de Digitales 3DavidAún no hay calificaciones
- Andrango David Deber 6 4676Documento8 páginasAndrango David Deber 6 4676DavidAún no hay calificaciones
- Deber 2.1Documento20 páginasDeber 2.1DavidAún no hay calificaciones
- Circuito amplificador JFET baja señalDocumento13 páginasCircuito amplificador JFET baja señalDavidAún no hay calificaciones
- Andrango David Deber4Documento6 páginasAndrango David Deber4DavidAún no hay calificaciones
- Andrango Munoz Raza CompensacionDocumento6 páginasAndrango Munoz Raza CompensacionDavidAún no hay calificaciones
- TAREA1 U 2Documento2 páginasTAREA1 U 2DavidAún no hay calificaciones
- Andrango Mosquera 4738 Informe 3 2Documento13 páginasAndrango Mosquera 4738 Informe 3 2DavidAún no hay calificaciones
- Altamirano Espinoza Lab2 1Documento4 páginasAltamirano Espinoza Lab2 1DavidAún no hay calificaciones
- Andrango Gualoto Edwin David Deber2Documento8 páginasAndrango Gualoto Edwin David Deber2DavidAún no hay calificaciones
- DEBER3P Medina Domenica 2752Documento7 páginasDEBER3P Medina Domenica 2752DavidAún no hay calificaciones
- Conceptos Basicos Simulacion de Circuitos Electronicos Con ProteusDocumento15 páginasConceptos Basicos Simulacion de Circuitos Electronicos Con ProteusHenry Gutierrez100% (1)
- Arquitectura referencial Big Data para gestión telecomunicacionesDocumento2 páginasArquitectura referencial Big Data para gestión telecomunicacionesJaime Eliseo Pilco SalazarAún no hay calificaciones
- Unidad 1 Algoritmo y ProgramacionDocumento11 páginasUnidad 1 Algoritmo y Programacionjuliette100% (1)
- Osciloscopio Agilent INFINIIUMDocumento20 páginasOsciloscopio Agilent INFINIIUMENIC-AITCGAún no hay calificaciones
- Diabluras, Diversiones y Anécdotas de Juan Manuel de Rosas 1859Documento89 páginasDiabluras, Diversiones y Anécdotas de Juan Manuel de Rosas 1859Ana AquistaAún no hay calificaciones
- Alcance y TareasDocumento62 páginasAlcance y TareasJordi CabanesAún no hay calificaciones
- Manual Cobhttpd EspañolDocumento42 páginasManual Cobhttpd EspañolFanny OjedaAún no hay calificaciones
- Kit de Legalizacion Microsoft para Windows 10 Pro, 1 Licencia Por PC, OPL NLDocumento2 páginasKit de Legalizacion Microsoft para Windows 10 Pro, 1 Licencia Por PC, OPL NLChristian Cruz VillarAún no hay calificaciones
- Guía Paso A Paso Nuevo Marangatu - Cómo Solicitar La Autorización y Timbrado de Documentos Preimpresos ImprentasDocumento8 páginasGuía Paso A Paso Nuevo Marangatu - Cómo Solicitar La Autorización y Timbrado de Documentos Preimpresos ImprentasLuis CaceresAún no hay calificaciones
- Computación I U1 Manual Del EstudianteDocumento38 páginasComputación I U1 Manual Del EstudianteRominaAún no hay calificaciones
- Actividades Del Tema 8 - Opciones de ArranqueDocumento4 páginasActividades Del Tema 8 - Opciones de ArranquechristianAún no hay calificaciones
- Prueba de Color1Documento1 páginaPrueba de Color1Javier Martinez CañalAún no hay calificaciones
- 2022-05 Inc 1 - F050-00229475Documento1 página2022-05 Inc 1 - F050-00229475MARCOAún no hay calificaciones
- Instrucciones PPSSPPDocumento12 páginasInstrucciones PPSSPPCkarlos Mtz hdezAún no hay calificaciones
- Reliable UAV LiDAR YellowScan SurveyorDocumento2 páginasReliable UAV LiDAR YellowScan Surveyorpablo carvajalAún no hay calificaciones
- Recuperación Tecnología ESO 2o pendientesDocumento25 páginasRecuperación Tecnología ESO 2o pendientesLola ZambranaAún no hay calificaciones
- Lenguaje Algoritmico 5Documento24 páginasLenguaje Algoritmico 5anon-68902Aún no hay calificaciones
- Ejercicios de procesador de textos MS Word 2010Documento4 páginasEjercicios de procesador de textos MS Word 2010Claudia HerreraAún no hay calificaciones
- Presentación Robot E-PuckDocumento5 páginasPresentación Robot E-PuckPatricio FuentealbaAún no hay calificaciones
- Manual de Uso Ems2Documento12 páginasManual de Uso Ems2Ryu Murillo VeydaAún no hay calificaciones
- Tec TopografoDocumento1 páginaTec TopografoEduardoAún no hay calificaciones
- Programacion EnsambladorDocumento7 páginasProgramacion Ensambladorjin_maxtorAún no hay calificaciones
- Ejemplo Practico TallerDocumento10 páginasEjemplo Practico TallervaleriaAún no hay calificaciones
- IR3045-3035-3030-3025Guia ServicioDocumento42 páginasIR3045-3035-3030-3025Guia ServicioJuan carlos CarrilloAún no hay calificaciones
- Proyecto SociotecnologicoDocumento17 páginasProyecto SociotecnologicoMario JavierAún no hay calificaciones
- Exam 0405Documento18 páginasExam 0405Camilo Ayala GomezAún no hay calificaciones
- DCS Tema5 EjemplosVHDLDocumento20 páginasDCS Tema5 EjemplosVHDLAleix EsparciaAún no hay calificaciones
- Manual de Usuario - Instalacion Dispositivos y Registro EcuapassDocumento6 páginasManual de Usuario - Instalacion Dispositivos y Registro EcuapassAdrianaAún no hay calificaciones