También podría gustarte
- Qué Es La Automatización Inteligente de ProcesosDocumento27 páginasQué Es La Automatización Inteligente de ProcesosGeraldine Carolina Ortega MontielAún no hay calificaciones
- 7.1 Controladores, SCADA, DCS, PLCDocumento18 páginas7.1 Controladores, SCADA, DCS, PLCMa Laura ZweedykAún no hay calificaciones
- 04-Tarea 2 FDocumento9 páginas04-Tarea 2 FEduardo Napoleón Morales FloresAún no hay calificaciones
- Pirámide de Automatización IndustrialDocumento5 páginasPirámide de Automatización IndustrialsantyAún no hay calificaciones
- Administracion de OperacionesDocumento13 páginasAdministracion de Operacionesloli vergaAún no hay calificaciones
- Automatización IndustrialDocumento3 páginasAutomatización Industrialmicaela constanteAún no hay calificaciones
- carpeta murillo ( dictados )Documento5 páginascarpeta murillo ( dictados )manualvaca7Aún no hay calificaciones
- Sistemas AutomatizadosDocumento15 páginasSistemas AutomatizadosGabriel HernandezAún no hay calificaciones
- AUTOMATIZACIONDocumento3 páginasAUTOMATIZACIONPedroGulfoAún no hay calificaciones
- Automatizacion y PolimerosDocumento11 páginasAutomatizacion y PolimerosPerez Lopez AbelAún no hay calificaciones
- Grados de AutomatizaciónDocumento7 páginasGrados de AutomatizaciónAdam VargasAún no hay calificaciones
- Clase 1Documento31 páginasClase 1Jeeson EstebanAún no hay calificaciones
- Sistema ScadaDocumento6 páginasSistema ScadaRUDY HERCULESAún no hay calificaciones
- Automatización Industrial FinalizadoDocumento30 páginasAutomatización Industrial FinalizadoGISELA ESPINOZA MORENOAún no hay calificaciones
- S01 Introduccion-PlcDocumento72 páginasS01 Introduccion-PlcAntonio Berrospi ZarateAún no hay calificaciones
- Conceptos de Automatización IndustrialDocumento19 páginasConceptos de Automatización IndustrialhotusaborAún no hay calificaciones
- Automatización industrial: niveles y estructuraDocumento3 páginasAutomatización industrial: niveles y estructuraVíctor FajardoAún no hay calificaciones
- Qué Es La Instrumentación Industrial y para Qué SirveDocumento12 páginasQué Es La Instrumentación Industrial y para Qué SirveJose RojasAún no hay calificaciones
- Red de Comunicación IndustrialDocumento12 páginasRed de Comunicación IndustrialLuis Felipe Herrera JarabaAún no hay calificaciones
- Definición y Aplicacion de PLCDocumento5 páginasDefinición y Aplicacion de PLCNoel TellAún no hay calificaciones
- Tarea 1Documento4 páginasTarea 1Víctor FajardoAún no hay calificaciones
- Proceso de ManufacturaDocumento46 páginasProceso de ManufacturaGeraldine Carolina Ortega MontielAún no hay calificaciones
- AutomatizaciónDocumento6 páginasAutomatizaciónYatziry LópezAún no hay calificaciones
- Investigación 1-Automatización y RobóticaDocumento11 páginasInvestigación 1-Automatización y RobóticaLiz FernandoAún no hay calificaciones
- Contenido Sobre Sistemas SupervisoriosDocumento18 páginasContenido Sobre Sistemas SupervisoriosFrancisco AlonsoAún no hay calificaciones
- Informe 1Documento7 páginasInforme 1Richar PomaAún no hay calificaciones
- INSTRUMENTACIONDocumento12 páginasINSTRUMENTACIONCarla Lucia Aliaga ZabalaAún no hay calificaciones
- Presentacion Arbildo Lopez - 1Documento16 páginasPresentacion Arbildo Lopez - 1Henri MontenegroAún no hay calificaciones
- PLC y Sistema SCADA.Documento25 páginasPLC y Sistema SCADA.Natalia Silva AcevedoAún no hay calificaciones
- Taller 12Documento95 páginasTaller 12Manûû PatîñôAún no hay calificaciones
- Asignatura:: Automatización de Sistemas de ProducciónDocumento12 páginasAsignatura:: Automatización de Sistemas de ProducciónKarol OrtegaAún no hay calificaciones
- Informe 11Documento12 páginasInforme 11ZARUHI NAHOMI UCEDA DIAZAún no hay calificaciones
- PLCDocumento3 páginasPLCIre HernándezAún no hay calificaciones
- Tecnologías de La Automatización Industrial: CursoDocumento23 páginasTecnologías de La Automatización Industrial: Cursojuan zegarraAún no hay calificaciones
- Reporte de AutomatizaciónDocumento7 páginasReporte de AutomatizaciónL Fabian Esc100% (1)
- Ensayo Redes de Comunicacion IndustrialDocumento11 páginasEnsayo Redes de Comunicacion IndustrialTalleres BrandAún no hay calificaciones
- Informe 3 AUTOMATIZACION INDUSTRIAL - Renato Briceño - Electrotecnia IndustrialDocumento10 páginasInforme 3 AUTOMATIZACION INDUSTRIAL - Renato Briceño - Electrotecnia Industrialrenato briceñoAún no hay calificaciones
- Proyecto de AutomatizacionDocumento4 páginasProyecto de AutomatizacionDavid MartinezAún no hay calificaciones
- Automatización Industrial: Niveles y ComponentesDocumento29 páginasAutomatización Industrial: Niveles y Componentesisabella Uribe usuga 8.fAún no hay calificaciones
- Curso de Automatizacion IndustrialDocumento23 páginasCurso de Automatizacion IndustrialYeison Huaracha100% (1)
- Unid1 Sem2 Intro AutomatizaciónDocumento21 páginasUnid1 Sem2 Intro AutomatizaciónAntony Adauto SaenzAún no hay calificaciones
- Automatizacion Industrial IntroducciónDocumento8 páginasAutomatizacion Industrial IntroducciónRonald Choque JaliriAún no hay calificaciones
- Piramide de AutomatizacionDocumento6 páginasPiramide de AutomatizacionBrigit Tapia VillarroelAún no hay calificaciones
- Capitulo 1 (Modo de Compatibilidad)Documento36 páginasCapitulo 1 (Modo de Compatibilidad)Jescenia M Ruiz TAún no hay calificaciones
- Diagramas de LazosDocumento9 páginasDiagramas de LazosLuis Augusto RuedaAún no hay calificaciones
- Plataforma Scada Primera UnidadDocumento54 páginasPlataforma Scada Primera UnidadEsteban ÁlvarezAún no hay calificaciones
- Documental de Big ColaDocumento33 páginasDocumental de Big ColawilliamAún no hay calificaciones
- SCADA y HMIDocumento40 páginasSCADA y HMIMarkiño CruzAún no hay calificaciones
- Explique de Forma Crítica Constructiva Los Sistemas de Automatización Que Se Aplican en Las Industrias de Los Sectores Más Frecuentes de La Actualidad NacionalDocumento2 páginasExplique de Forma Crítica Constructiva Los Sistemas de Automatización Que Se Aplican en Las Industrias de Los Sectores Más Frecuentes de La Actualidad Nacionalcarla artolaAún no hay calificaciones
- Automatizacion IndustrialDocumento16 páginasAutomatizacion IndustrialRafael CarrilloAún no hay calificaciones
- Principios de Funcionamiento Del PLCDocumento4 páginasPrincipios de Funcionamiento Del PLCAnthony Daniel Berrocal TorrealvaAún no hay calificaciones
- Informe PLCDocumento35 páginasInforme PLCLaurita GastelumAún no hay calificaciones
- Pirámide de Automatización PDFDocumento8 páginasPirámide de Automatización PDFAndres Felipe Leal GarciaAún no hay calificaciones
- Introduccion - CONTROLADORES LÓGICOS PROGRAMABLESDocumento18 páginasIntroduccion - CONTROLADORES LÓGICOS PROGRAMABLESKyonx2Aún no hay calificaciones
- Automatizacion IEEE - Pregrado (Autoguardado)Documento7 páginasAutomatizacion IEEE - Pregrado (Autoguardado)Anonymous VfVGr5TqVAún no hay calificaciones
- Automatizacion TiposDocumento14 páginasAutomatizacion Tiposalvaroazael.lealAún no hay calificaciones
- AutomatizacionDocumento15 páginasAutomatizacionVitigo96Aún no hay calificaciones
- Piramide de AutomatizacionDocumento6 páginasPiramide de AutomatizacionEdison MedinaAún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209De EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209Aún no hay calificaciones
- Instrumentacion Tema 1Documento10 páginasInstrumentacion Tema 1Shanira Lisset RamirezAún no hay calificaciones
- Tarea 16 ActubreDocumento1 páginaTarea 16 ActubreShanira Lisset RamirezAún no hay calificaciones
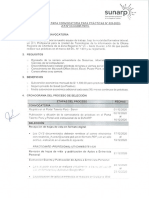
- SunarpDocumento1 páginaSunarpShanira Lisset RamirezAún no hay calificaciones
- Trabajo GrupalDocumento4 páginasTrabajo GrupalShanira Lisset RamirezAún no hay calificaciones
- Clase 2 Apuntes CONTROL DE PROCESOSDocumento27 páginasClase 2 Apuntes CONTROL DE PROCESOSShanira Lisset RamirezAún no hay calificaciones
- Propuesta Técnica - Bienes o SuministrosDocumento6 páginasPropuesta Técnica - Bienes o SuministrosShanira Lisset RamirezAún no hay calificaciones
- Propuesta Tecnica CorteDocumento1 páginaPropuesta Tecnica CorteShanira Lisset RamirezAún no hay calificaciones
- Clase 1 ApuntesDocumento15 páginasClase 1 ApuntesShanira Lisset RamirezAún no hay calificaciones
- Actividad #7 - Problemas Operativos SXDocumento1 páginaActividad #7 - Problemas Operativos SXShanira Lisset RamirezAún no hay calificaciones
- Propuesta Técnica - Bienes o SuministrosDocumento6 páginasPropuesta Técnica - Bienes o SuministrosShanira Lisset RamirezAún no hay calificaciones
- Identificación de instrumentos por combinación de letras y númerosDocumento94 páginasIdentificación de instrumentos por combinación de letras y númerosShanira Lisset RamirezAún no hay calificaciones
- Propuesta Técnica - Bienes o SuministrosDocumento6 páginasPropuesta Técnica - Bienes o SuministrosShanira Lisset RamirezAún no hay calificaciones
- Proceso de lixiviación en la fundición de oroDocumento10 páginasProceso de lixiviación en la fundición de oroShanira Lisset RamirezAún no hay calificaciones
- SamarcoDocumento14 páginasSamarcoShanira Lisset RamirezAún no hay calificaciones
- Analisis Estadistico de Las Calificaciones PDFDocumento8 páginasAnalisis Estadistico de Las Calificaciones PDFCarolina SalcedoAún no hay calificaciones
- Examén Operaciones Planta ALUMNODocumento3 páginasExamén Operaciones Planta ALUMNOShanira Lisset RamirezAún no hay calificaciones
- Actividad #7 - Problemas Operativos SXDocumento1 páginaActividad #7 - Problemas Operativos SXShanira Lisset RamirezAún no hay calificaciones
- SamarcoDocumento19 páginasSamarcoShanira Lisset RamirezAún no hay calificaciones
- Chinalco - ExposicionDocumento21 páginasChinalco - ExposicionShanira Lisset RamirezAún no hay calificaciones
- Peebles - FiltrosDocumento8 páginasPeebles - FiltrosShanira Lisset RamirezAún no hay calificaciones
- Proceso de lixiviación en la fundición de oroDocumento10 páginasProceso de lixiviación en la fundición de oroShanira Lisset RamirezAún no hay calificaciones
- Introducción a Python y Pensamiento ComputacionalDocumento26 páginasIntroducción a Python y Pensamiento ComputacionalShanira Lisset RamirezAún no hay calificaciones
- Postulantes Aptos A Entrevista Personal Practicas 26Documento1 páginaPostulantes Aptos A Entrevista Personal Practicas 26Shanira Lisset RamirezAún no hay calificaciones
- LINEAMIENTOS #026 - Prácticas ProfesionalesDocumento2 páginasLINEAMIENTOS #026 - Prácticas ProfesionalesShanira Lisset RamirezAún no hay calificaciones
- Ejemplo de Carta de Reclamo BancarioDocumento1 páginaEjemplo de Carta de Reclamo BancarioShanira Lisset Ramirez100% (3)
- Expo Tesis I Sem 2 PreguntasDocumento33 páginasExpo Tesis I Sem 2 PreguntasShanira Lisset RamirezAún no hay calificaciones
- Silabo Topicos3Documento9 páginasSilabo Topicos3Shanira Lisset RamirezAún no hay calificaciones
- Administración de ProyectoDocumento38 páginasAdministración de ProyectoShanira Lisset RamirezAún no hay calificaciones
- Consolidado Matricula 0201614027Documento1 páginaConsolidado Matricula 0201614027Shanira Lisset RamirezAún no hay calificaciones
- 10 EvaluacionDocumento2 páginas10 EvaluacionyoAún no hay calificaciones
- Fertil I ZantesDocumento16 páginasFertil I Zanteseliza monteroAún no hay calificaciones
- Foro - Vigilancia Epidemiológica - Alexia Guzmán ChacónDocumento2 páginasForo - Vigilancia Epidemiológica - Alexia Guzmán ChacónKarito FloresAún no hay calificaciones
- Proyecto de Producción de Huevo de CodornicesDocumento3 páginasProyecto de Producción de Huevo de CodornicesRogelio CanoAún no hay calificaciones
- Preguntas ContextualizadasDocumento4 páginasPreguntas ContextualizadasSteveɳ SandovalAún no hay calificaciones
- Estudios ParanormalesDocumento145 páginasEstudios ParanormalesAna Lía DellacasaAún no hay calificaciones
- Historia y estudios de TBJDocumento2 páginasHistoria y estudios de TBJgordo6092Aún no hay calificaciones
- Metodo GraficoDocumento58 páginasMetodo GraficoPedro Mijael CastilloAún no hay calificaciones
- Contrato de Financiamiento Dr. LeyvaDocumento13 páginasContrato de Financiamiento Dr. LeyvaHerbertAIAún no hay calificaciones
- Cálculo del momento en un álabe hidráulico y velocidad de arrastre para anularloDocumento4 páginasCálculo del momento en un álabe hidráulico y velocidad de arrastre para anularlorockyjr2593Aún no hay calificaciones
- Ramsay Eileen El ReencuentroDocumento271 páginasRamsay Eileen El ReencuentroJeanmar730100% (1)
- Manual - Introducción A La MecatrónicaDocumento94 páginasManual - Introducción A La MecatrónicadiegoAún no hay calificaciones
- Evaluacion Final AGENCIA Y ANALISIS PUBLICITARIODocumento11 páginasEvaluacion Final AGENCIA Y ANALISIS PUBLICITARIOsamir guerreroAún no hay calificaciones
- Regresión laboralDocumento9 páginasRegresión laboraltomas mosqueraAún no hay calificaciones
- Modulo Iv-Mapeo Geologico en Tajo AbiertoDocumento62 páginasModulo Iv-Mapeo Geologico en Tajo Abiertohilber palominoAún no hay calificaciones
- El Pequeño BuhoDocumento5 páginasEl Pequeño BuhoAndres VillamizarAún no hay calificaciones
- Gana Dinero Paseando PerrosDocumento125 páginasGana Dinero Paseando PerrosAlejandra M.Aún no hay calificaciones
- Teoria Del ErrorDocumento57 páginasTeoria Del ErrorVero MarAún no hay calificaciones
- TRABAJODocumento9 páginasTRABAJOmaryAún no hay calificaciones
- Losas Uni y Bidireccionales PDFDocumento33 páginasLosas Uni y Bidireccionales PDFjuan lennoxAún no hay calificaciones
- Coca ColaDocumento268 páginasCoca ColaAlizz Loqiitap0% (1)
- Tesis Plan Estrategico en Comercializadoras de CombustiblesDocumento95 páginasTesis Plan Estrategico en Comercializadoras de CombustiblesandreaAún no hay calificaciones
- Capítulo I, Introducción Al Transporte Turístico.Documento22 páginasCapítulo I, Introducción Al Transporte Turístico.Lázara100% (1)
- Elasticidad Y Resistencia de Materiales: Msc. Ing. Fernando Enciso VargasDocumento49 páginasElasticidad Y Resistencia de Materiales: Msc. Ing. Fernando Enciso VargasCristihan HbAún no hay calificaciones
- La Matanza de Baena PDFDocumento25 páginasLa Matanza de Baena PDFjuanAún no hay calificaciones
- Secuencia Didactica - Incendios Forestales 2º A y BDocumento10 páginasSecuencia Didactica - Incendios Forestales 2º A y BmarinesubAún no hay calificaciones
- Aspecto Social, Economico y Cultural en Mexico.Documento3 páginasAspecto Social, Economico y Cultural en Mexico.zoedonaji33% (3)
- FacturaDocumento3 páginasFacturaSantiago TorresAún no hay calificaciones
- Documento OdontolegalcDocumento17 páginasDocumento OdontolegalcMrArquitectoAún no hay calificaciones
- Anexo 6 - Pacto de TransparenciaDocumento3 páginasAnexo 6 - Pacto de TransparenciaMónica León AAún no hay calificaciones