También podría gustarte
- SISTEMA DE INFORMACION GERENCIAL - DiapositivasDocumento21 páginasSISTEMA DE INFORMACION GERENCIAL - DiapositivasJORGE PABA MERCADOAún no hay calificaciones
- Jerarquia de Las Leyes de MexicoDocumento24 páginasJerarquia de Las Leyes de MexicoJOCELYN BERNAL GUTIERREZAún no hay calificaciones
- Libro JavaDocumento407 páginasLibro JavaDIEGO EMANUEL FLORES LLOCLLAAún no hay calificaciones
- Manual Del Operador: Unidad MecánicaDocumento230 páginasManual Del Operador: Unidad Mecánicabatiste alandeteAún no hay calificaciones
- Evaluacion # 4 Inteligencia de NegociosDocumento4 páginasEvaluacion # 4 Inteligencia de NegociosLorena100% (1)
- ARRULLO DE MAMA Reporte Del VideoDocumento3 páginasARRULLO DE MAMA Reporte Del VideoJOCELYN BERNAL GUTIERREZAún no hay calificaciones
- Politicas de Cobranza CorreccionDocumento2 páginasPoliticas de Cobranza CorreccionJOCELYN BERNAL GUTIERREZAún no hay calificaciones
- Metodos - Maquinados CNCDocumento16 páginasMetodos - Maquinados CNCJOCELYN BERNAL GUTIERREZAún no hay calificaciones
- Las Particiones GPTDocumento2 páginasLas Particiones GPTJuan Carlos Ramirez FuentesAún no hay calificaciones
- Ficha 01 - Presentación General (Prof. Frittelli)Documento25 páginasFicha 01 - Presentación General (Prof. Frittelli)Pedro YanoverAún no hay calificaciones
- Ejercicios PseitDocumento8 páginasEjercicios PseitFabian Andres MoraAún no hay calificaciones
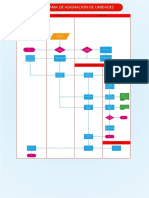
- Diagrama de Flujo Asignación de UnidadesDocumento1 páginaDiagrama de Flujo Asignación de UnidadesFrancis Miguel Sánchez IglesiasAún no hay calificaciones
- Lenovo G465G565 User Guide V1.0 (Spanish)Documento74 páginasLenovo G465G565 User Guide V1.0 (Spanish)Diego100% (1)
- La Comunicación y Los Avances TecnológicosDocumento12 páginasLa Comunicación y Los Avances TecnológicosHilda Yadira Amaya RodríguezAún no hay calificaciones
- Escritura Pública de Compraventa - 16CGL1014 - ÑUBLEDocumento19 páginasEscritura Pública de Compraventa - 16CGL1014 - ÑUBLEagustin.watkinsAún no hay calificaciones
- MODULO#1 - 1 Conceptos BasicosDocumento27 páginasMODULO#1 - 1 Conceptos BasicosMario MorenoAún no hay calificaciones
- GUIAS YEPES MATEMATICAS CLEI 4 - Act 3 - 2 PeriodoDocumento7 páginasGUIAS YEPES MATEMATICAS CLEI 4 - Act 3 - 2 PeriodoTutor SegoviaAún no hay calificaciones
- G7 TA3 Cultura y OrganizaciónDocumento14 páginasG7 TA3 Cultura y OrganizaciónNICOLAS GuevaraAún no hay calificaciones
- Investigacion OracleDocumento12 páginasInvestigacion Oraclemacv7304Aún no hay calificaciones
- IaaS Vs PaaS Vs SaaSDocumento9 páginasIaaS Vs PaaS Vs SaaSpatricia canoAún no hay calificaciones
- Hem-6124-Ss R3Documento2 páginasHem-6124-Ss R3Eimy PeñaAún no hay calificaciones
- Castellini Skema 6 25OTT2023 SPDocumento18 páginasCastellini Skema 6 25OTT2023 SPJose Antonio ArizaAún no hay calificaciones
- Lce - R1c1aDocumento3 páginasLce - R1c1aLuca BazzoliAún no hay calificaciones
- Malla Curricular Diseño DigitalDocumento4 páginasMalla Curricular Diseño DigitalIsabella GarcíaAún no hay calificaciones
- Material de Estudio - Examen UC2 - PropuestaAlumnos - 09 - Ejercicios - Secuenciales - Python - Parte - 4Documento5 páginasMaterial de Estudio - Examen UC2 - PropuestaAlumnos - 09 - Ejercicios - Secuenciales - Python - Parte - 4barushmidoriyaAún no hay calificaciones
- FASE 1 TelecontrolDocumento14 páginasFASE 1 TelecontrolErick Machado100% (1)
- Guiandenaprendizajen2nn1n 26607b7980179c6Documento5 páginasGuiandenaprendizajen2nn1n 26607b7980179c6Jorge BenincoreAún no hay calificaciones
- 8 D 901 Cad@2023823194356Documento8 páginas8 D 901 Cad@2023823194356Draven Proserpine IbraunAún no hay calificaciones
- Trabajo de Taller y MaquinasDocumento9 páginasTrabajo de Taller y Maquinasjulian andres osorioAún no hay calificaciones
- 6 Los Arreglos, Vectores y MatricesDocumento15 páginas6 Los Arreglos, Vectores y MatricesAlfredo TorresgAún no hay calificaciones
- LAB2 Señales Parte2Documento15 páginasLAB2 Señales Parte2Danilo Andre LuqueAún no hay calificaciones
- Paquete de Marketing DigitalDocumento3 páginasPaquete de Marketing DigitalMaria Celeste Sarmiento VelizAún no hay calificaciones
- Tablet-SM-P900 UM Open Kitkat SpaDocumento162 páginasTablet-SM-P900 UM Open Kitkat SpaGeorge PineAún no hay calificaciones
- Sistema NumericoDocumento14 páginasSistema NumericoPipe ValbuenaAún no hay calificaciones