Documentos de Académico
Documentos de Profesional
Documentos de Cultura
7.dinamica de Estructuras2-Upn
Cargado por
Diego VillanuevaTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
7.dinamica de Estructuras2-Upn
Cargado por
Diego VillanuevaCopyright:
Formatos disponibles
INGENIERIA SISMICA
PRIMERA UNIDAD
1.0. ELEMENTOS BASICOS DE DINAMICA DE ESTRUCTURAS
1.0.1. CONCEPTOS GENERALES
1.0.1.1- DINAMICA DE LAS ESTRUCTURAS
Es aquella parte de la Mecánica Aplicada que desarrolla métodos de
investigación para el estudio del comportamiento de las estructuras sujetas a la
acción de las vibraciones y choques.
1.0.1.2. ACCION DINAMICA O EXCITACION DINAMICA
Se denomina así a una carga que varia rápidamente con el tiempo produciendo en
la estructura fuerzas de inercia. Cualquier estructura sujeta a una acción dinámica
se comporta como un sistema oscilante. Las principales fuentes de fenómenos
vibratorios que pueden afectar las construcciones son:
Las maquinarias y las instalaciones cuyo funcionamiento implica la
presencia de masas en desequilibrio o genera choques.
Los Vehículos en movimiento.
Los terremotos.
La acción del viento.
Las explosiones.
Los choques accidentales.
1.0.1.3. ANALISIS DINAMICO
Es un conjunto de métodos y procedimientos utilizados para establecer el estado
de deformación y de tensión en las estructuras sujetas a cargas dinámicas. Las
deformaciones y las tensiones varían en tiempo según leyes mas o menos
complicadas, que dependen del tipo de acción dinámica que actúa.
1.0.1.4. OBJETIVOS DEL ANALISIS DINAMICO
Presentar los métodos para analizar y calcular los esfuerzos y
deformaciones desarrolladas en cualquier tipo de estructura, cuando están
sujetas a cualquier tipo de carga dinámica arbitraria.
En este sentido el objetivo puede considerarse como una extensión de los
métodos estándares del análisis estructural estático o incluir también
cargas dinámicas en su análisis.
En el análisis lineal de estructuras es usual separar las ecuaciones
estáticas y dinámicas para evaluar la respuesta separadamente para el
tipo de carga y luego superponer las dos respuestas para obtener la
respuesta total, mediante las denominadas envolventes.
1.0.1.5.- RESPUESTA DINAMICA.- Se llama así a cualquier cantidad que
pueda caracterizar el efecto de las acciones dinámicas sobre estructuras. La
noción tiene carácter genérico, pudiendo significar cualquier consecuencia de las
excitaciones dinámicas sobre las construcciones, como desplazamientos,
aceleraciones, tensiones, esfuerzos, axiles, cortantes, momentos, etc.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 1
INGENIERIA SISMICA
Cuando es tratado así el método de análisis estático y dinámico, diremos
que son fundamentalmente de carácter diferente.
El termino dinámico puede ser definido, simplemente como una
variación con el tiempo, así pues una carga dinámica, es aquella que
posee magnitud y posición respecto al tiempo.
Similarmente la respuesta estructural para una carga dinámica (resultante
de esfuerzos y deflexiones) son también variables con el tiempo o
dinámicos, de donde deducimos que un problema dinámico tendrá una
solución única que existe en el método estático.
La diferencia mas importante reside en los esfuerzos de inercia, para
ilustración consideremos el caso de una viga en el cual observamos el
método estático y dinámico.
P P(t)
a b a b
Fuerzas de
Inercia
Diagrama de Momento Estático
Diagrama de Momentos Dinámicos
1.0.1.6.-PROCEDIMIENTOS PARA EVALUAR LA RESPUESTA
ESTRUCTURAL
Existen dos métodos para evaluar la respuesta estructural:
1. DETERMINISTICO.- Depende de cómo la carga esta definida, y si el
tiempo de variación de la carga es conocida, aunque puede ser altamente
oscilatoria o irregular en su carácter, será definida como una carga dinámica
prescrita, y el análisis de respuesta de cualquier sistema estructural especifico a
una carga dinámica prescrita es definida.
De manera muy clara en el método deterministico se conocen las cargas
dinámicas.
En general la respuesta estructural ante carga dinámica esta expresada
únicamente en términos del desplazamiento de la estructura. Hasta hoy
un análisis de carga deterministico correspondiente a la historia tiempo
desplazamiento prescrito a la historia de carga, otro aspecto de la
respuesta estructural deterministica son los esfuerzos, deformaciones y
acciones mecánicas, etc.
2. NO DETERMINISTICO.- Cuando no se conoce la carga dinámica,
pero puede establecerse sobre la base probabilística.
En el curso de Dinámica de Estructuras se tratara de poner un énfasis al
desarrollo por métodos determinísticos.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 2
INGENIERIA SISMICA
1.0.2.- ESTRUCTURA REAL, MODELO MECANICO, MODELO,
MATEMATICO
1.0.2.1.- SISTEMA ESTRUCTURAL REAL.-
Se denomina así a la estructura real, tridimensional, conformado por cimentación,
vigas, columnas y losas, etc.
Consideramos una estructura real sujeta al movimiento sísmico del suelo, la
estructura actúa como un filtro entre el movimiento sísmico y su propio movimiento
de respuesta, en conformidad con el diagrama presentado en la figura adjunta.
Movimiento Filtro Movimiento
Sísmico de respuesta
Diagrama de Cálculo de la Respuesta Sísmica.
En consecuencia para poder calcular la respuesta sísmica, es necesario definir con
anterioridad las características del movimiento sísmico y las del filtro.
La definición del filtro implica los siguientes pasos:
Estudio de la Estructura Real.
Definición del modelo Mecánico (Dinámico para la estructura).
Definición del Modelo Matemático.
1.0.2.2.-MODELO DINAMICO.- Se establece en función del tipo de estructura,
para que caracterice lo mejor posible el comportamiento de la misma y para que
permita describir correctamente su respuesta sísmica, como en todos los problemas
de mecánica aplicada, en la ingeniería sísmica tampoco se calcula la estructura real
sino el modelo mecánico adoptado para la misma.
El diagrama de calculo la respuesta sísmica se transforma en un equivalente a:
Excitación Características Respuesta
Sísmica del Modelo Sísmica
Dinámico
También resulta de aquí que el cálculo sísmico es un calculo de verificaciones ya que
supone conocida una forma previa de la estructura, forma que se modificara o no en
función de los resultados que se obtienen.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 3
INGENIERIA SISMICA
1.0.2.3.-MODELO MATEMATICO.- Es el cálculo de la respuesta dinámica, se
efectúa utilizando un modelo matemático que describe cuantitativamente las
propiedades mecánicas del modelo dinámico. Las características mecánicas que se
necesitan para poder analizar el modelo, son características de masa (Inercia), de la
rigidez (k), amortiguamiento (c) y de la acción dinámica P(t).
1.0.3.- TIPOS DE CARGAS DINAMICAS PRESCRITAS
Los Sistemas estructurales pueden estar sujetos a una u otra forma de carga
dinámica, durante su vida útil.
Desde un punto de vista analítico en necesario dividir las cargas dinámicas en
prescritas o deterministicas en dos categorías basicas.
1.0.3.1.- PERIODICAS.- Cargas repetidas que tienen la misma variación con
respecto al tiempo para un gran numero de ciclos.
P(t)
T
Maquina Rotatoria Sobre un
Sistema de piso
P(t)
t
Fuerzas Propulsoras en la Proa de Un
Barco
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 4
INGENIERIA SISMICA
P(t)
P(t)
t t
Se dice que una función P(t) es periódica si existe un constante T, tal que :
P(t+T) = P(t), para todo t
El menor número T para el cual se cumple esta identidad se llama periodo, la
carga periódica puede ser tanto discontinua como continua.
Si la carga periódica varia ininterrumpidamente según la ley del seno o coseno,
entonces tal carga se lo considera vibratoria o armónica, la carga periódica varia
ininterrumpidamente, por diferentes mecanismos, en particular la carga
vibratoria, por mecanismos que tienen masas desequilibradas de las partes
rotatorias.
1.0.3.2.-CARGAS NO PERIODICAS.- Formado por impulsos de corta y larga
duración, por ejemplo: Explosiones, sismos, etc.
P(t)
Generadas por un Sismo en un tanque de agua
P(t)
Carga impulsiva Carga Sobre un Edificio debido a
la Explosión de una Bomba
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 5
INGENIERIA SISMICA
Este tipo de carga se subdivide a la vez en :
a) Cargas de Acción Breve (Impulsos).- Se caracteriza por un desarrollo rápido
y una desaparición también rápida de las cargas, ejemplos cargas de explosivos,
en este caso generalmente la estructura no disipa energía, a pesar de tener un
amortiguamiento estructural.
b) Cargas de Impacto.- En forma de golpes en un lugar determinado de la
edificación. Se caracteriza por un cambio brusco de la velocidad del cuerpo que
golpea en un corto plazo de tiempo. Tal carga puede ser también periódica
ejemplo: Martillos y Mecanismos de impacto.
c) Carga Móvil.- De valor constante o variable que cambia su posición sobre
la edificación, así como por ejemplo: los generados por automóviles, camiones,
locomotoras eléctricas, etc.
d) Carga Sísmica.- Son los movimientos desordenados del suelo, empujes,
golpes y vibraciones durante el terremoto.- (observar para mayor entendimiento
las paginas 13y 14 de Mecánica de la Construcción de KISELIOV).
1.0.4.- RESPUESTA ESTRUCTURAL ANTE CARGA DINAMICA.
Se denomina así a cualquier cantidad que pueda caracterizar el efecto de las
acciones dinámicas sobre las estructuras. La noción tiene carácter genérico,
pudiendo significar cualquier consecuencia de las excitaciones dinámicas sobre
las construcciones (como desplazamiento, velocidades, aceleraciones, tensiones,
esfuerzos, acciones mecánicas, etc.)
En general se expresa en términos del desplazamiento de la estructura, luego el
análisis Determinístico de una historia tiempo – desplazamiento correspondiente
a la historia de la carga permanente, da otros aspectos de la respuesta estructural
tales como esfuerzos, deformaciones, fuerzas internas, etc., obtenidas como base
secundaria del análisis.
El análisis no Determinístico tiene otro enfoque en el cálculo de la respuesta
dinámica.
1.0.5.- CARACTERISTICAS ESCENCIALES DEL PROBLEMA
DINAMICO
El problema dinámico estructural se diferencia con el estático en dos aspectos
fundamentales:
El fenómeno se refiere a su variación en el tiempo de la respuesta y
debido a que la carga y la respuesta varían con el tiempo, lo que hace
que el problema dinámico no tenga solamente una solución como el
estático, sino una variación de soluciones correspondientes a todos los
tiempos de interés en la historia de la respuesta.
Presencia de aceleraciones en las vigas en movimientos que trae como
consecuencia la aparición de fuerzas de inercia.
La estructura esta sujeta a acciones dinámicas, las que generan la aparición de
fuerzas de inercia, que modifican el comportamiento de la estructura.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 6
INGENIERIA SISMICA
Ejemplo.- Si consideramos la columna mostrada en la figura, accionada por la
fuerza estática F, los esfuerzos que aparecen en el mismo se pueden establecer
utilizando la ecuación de equilibrio estático.
Columna sometida a carga estática
Pero si aplicamos una carga dinámica F(t), o en el caso sísmico la aceleración en
el suelo, en la columna aparecen fuerzas de inercia Fi producidas por las
aceleraciones en cada punto de la estructura. En estas condiciones los esfuerzos
que se producen en la estructura en el caso dinámico se deben no solamente al
efecto de la acción F(t), sino también a las fuerzas de inercia Fi.
y y
r r
Fi = (y, t)
F(t)
m(y)
m(y) a(t)
Sometida a carga Dinámica Sometida a carga Sísmica
En cambio en el caso sísmico los esfuerzos que aparecen en el pilar se deben solamente
a las fuerzas de inercia inducidas por la aceleración del suelo a (t).
P(t)
p
fig. (a) fig. (b)
Si una viga simplemente apoyada esta sujeta a una carga P, los momentos internos
cortantes y deformaciones dependen directamente de la carga y pueden ser calculados
de P mediante el equilibrio de fuerzas. Si la carga P(t) se aplica dinámicamente los
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 7
INGENIERIA SISMICA
desplazamientos resultantes de la viga están asociados a las aceleraciones, las que
generan fuerzas de inercia que resisten a dichas aceleraciones. Entonces los momentos y
los cortantes internos en las viga, deben equilibrar no solamente a la fuerza
externamente aplicada, sino también a las fuerzas de inercia que resultan de las
aceleraciones de la viga.
1.0.6.- GRADOS DE LIBERTAD DINAMICA
Es el numero mínimo de desplazamientos que se tiene que conocer para definir por
completo la posición de la estructura en cada instante durante su vibración,
conocida su posición deformada, se pueden establecer además las deformaciones y
tensiones, en cada punto de la estructura y en cada instante, utilizando los principios del
calculo estático.
Otra definición, es el número de coordenadas generalizadas (giros, desplazamientos,
etc.) que se requieren para definir la configuración o posición de un sistema en
cualquier instante. Si se puede definir la posición de una estructura durante su
vibración utilizando un solo parámetro (desplazamiento), se dice que aquella estructura
tiene un solo grado de libertad dinámica.
Ejemplo. De estructuras que se calculan con modelos con un solo grado de libertad
dinámica.
a.- Estructura Nave Industrial y que las columnas no se deforman.
b.- Marco con vigas infinitamente rígido.
c.- Tanque de Agua.
d.-Modelo Dinamico Utilizable en el calculo de estructuras.
m m
m
x
K/2 K/2 k
a(t)
(d)
(a) (b) (c)
Ejemplo.- La posición deformada del pórtico de la figura anterior en la situación en que
el terremoto induce en el vibraciones en la dirección "x", que se puede definir en cada
instante por el desplazamiento horizontal al nivel de la viga. Entonces la masa "m", de
la estructura (la de la viga, mas de la mitad de los columnas), se considera concentrada
en la dirección de este desplazamiento (fig. b), resultando el modelo dinámico de la fig.
(d). El tanque elevado de la fig. (c) puede ser analizado con el mismo modelo con un
solo grado de libertad dinámica. Con la masa del deposito y la de una parte de la torre
concentrada en el centro de la masa del deposito.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 8
INGENIERIA SISMICA
El modelo se denomina péndulo invertido y las características que la definen son su
masa (m) y la rigidez (k)
X2 X2
K2
X1
X1
K1
(a) (b)
Estructura definida bajo 2 grados de libertad puesto que sus posiciones deformadas
pueden ser definidas por dos desplazamientos X1(t) y X2(t). Si analizamos estos
ejemplos resulta que el número de grados de libertad dinámica se puede definir como el
número mínimo de conexiones simples, necesarias para fijar el sistema oscilante en
posición de reposo.
Otros ejemplos se presentan en las figuras adjuntas donde no solamente se considera la
posibilidad de vibración inducida, sino también por fuerzas dinámicas de otra
naturaleza.
F(t) F(t)
m m
y y
F(t) m
x
Sobre los sistemas mostrados actúan
fuerzas dinámicas F(t),teniendo los
mismos un solo grado de libertad dinámica:
El desplazamiento de la masa (m) en
dirección vertical (y) o horizontal (x) .
F1(t) F2(t)
Y1 Y2
El sistema posee 2 grados de libertad
Dinámica en la dirección vertical Y1 y Y2.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 9
INGENIERIA SISMICA
F(t) m
X
Dos grados de libertad correspondientes a
Y
Las direcciones x e y.
mn xn
El pórtico plano mostrado esta sujeto a un
movimiento sísmico en su plano, posee n grados
de libertad dinámica, donde n representa el
mY xy
numero de las plantas.
Esta es una simplificación que aproxima bien el
x4
m4 problema real, siempre y cuando todos los
x3
m3 desplazamientos axiales de los pilares se
x2 desprecian y se pueda considerar que los pisos de
m2
x1 la estructura son suficientemente rígidos para que
a(t) m1
los desplazamientos horizontales de cada nudo de
las plantas sean iguales.
m8 m10
X2
M2
m7
m2 m9
x2 m4 m6 K2
X1
m1 m3 M1
x1 K1
La figura presenta un pórtico espacial que vibra en la dirección x debido a la acción de
un movimiento sísmico en la misma dirección. La estructura tiene 10 grados de libertad
dinámica (x1, x2,........ x10), en la hipótesis de que las losas son flexibles y permiten
desplazamientos relativos de los nudos en sus planos, y solo 2 grados de libertad
dinámica x1 y x2, que son los desplazamientos de cada planta, en la hipótesis de la losa
perfectamente rígido.
La identificación de los grados de libertad dinámica en una estructura necesita mucha
rigurosidad, ya que tiene gran influencia sobre el resultado del calculo dinámico, los
errores en esta operación pueden conducir a soluciones en total discordancia con la
respuesta real de la estructura.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 10
INGENIERIA SISMICA
La posición de toda masa concentrada en un sistema elástico (ver figura adjunta), sobre
el plano en caso general, se determina por dos desplazamientos de avance x e y, y un
gira alrededor del eje x-y en el espacio, por tres desplazamientos de avance por los ejes
x, y, z y tres giros alrededor de estos ejes, por consiguiente la masa tiene en el plano 3
grados de libertad y 6 grados de libertad en el espacio.
El número de grados de libertad del sistema se reduce también en el caso cuando
algunos desplazamientos de las masas son pequeños y se pueden prescindir de ellos
durante el cálculo.
Consideremos el pórtico solo con tres masas concentradas, si consideramos que es
imponderable diremos que cada masa concentrada sobre un sistema elástico tiene 3
grados de libertad, luego el sistema tiene 9 grados de libertad.
Si se prescinde de los giros de las masas, entonces cada masa esta sujeta a 2 grados de
libertad por masa, el sistema será de 6 grados de libertad.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 11
INGENIERIA SISMICA
Si además prescindimos de las deformaciones longitudinales y consideramos la cuerda
de la barra deformada igual a la longitud de la misma, y los desplazamientos de los
nudos pequeños, el sistema se convierta en un sistema de dos grados de libertad.
En este caso el desplazamiento de la zona masa depende de los desplazamientos de la
masa m1 y m2.(fig. 2)
m3
m1
m2
Fig. 2
La estructura corresponde a la idealización de una presa, que posee α grados de libertad.
a(t)
Infinitos grados de libertad (ejemplo una presa, represa)
En conclusión diremos que una de las primeras consideraciones en la solución de un
problema dinámico, es el calculo o determinación (por simple inspección) del numero
de grados de libertad.
X1 X1 X1
X2 X2
X3
1.G.L 2.G.L 3.G.L Infinitos G.L
3 3
6
2 5
1
4
6gdl 7gdl
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 12
INGENIERIA SISMICA
1.0.8. METODOS DE DISCRETIZACION DE SISTEMAS CONTINUOS
Consiste en modelar una estructura para que sea fácilmente analizable, a la
estructura original real, lo convertimos en otra equivalente pero mas sencilla de
ser analizable.
En el sistema dinámico una viga simplemente apoyada por ejemplo, su análisis
es complicado por el hecho que las fuerzas de inercia influencian sobre los
desplazamientos.
Los cuales a su vez son influenciadas por las fuerzas de inercia, este ciclo de
causa y efecto puede ser resuelto directamente solo mediante la formulación del
problema en términos de ecuaciones diferenciales. Además debido a que la
masa de las vigas esta distribuida, en su longitud, los desplazamientos y
aceleraciones deben ser diferidas para cada punto a lo largo del eje. En este caso
el análisis debe ser formulado en términos de ecuaciones parciales debido a que
la posición a lo largo de la luz, así como el tiempo deben tomarse como variable
independientes.
Consideremos una viga simplemente apoyada.
- Asumamos las siguientes propiedades físicas de la viga :
EI(x)- que define la rigidez y flexión.
m(x) - masa por unidad de longitud.
La carga transversal P(x,t), una respuesta de desplazamiento transversal.
v(x,t) - desplazamiento vertical.
Y
v (x , t)
P (x , t )
EI (x) , m(x)
x dx
La ecuación de movimiento para este sistema simple puede ser detenido por la
persuasión de las fuerzas de equilibrio actuantes en el segmento diferencial.
P(x,t) dx
P(x,t)
FI = (mdx) ∂v
M ∂t
M + ∂M dx
V ∂x
V + dy dx
dx
dx
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 13
INGENIERIA SISMICA
Si aceptamos:
A) La Teoría simple de flexión (hipótesis de Navier y teoremas de Bernoulli -
Euler)
B) Solo se consideran deflexiones por flexión.
C) No se consideran las deformaciones por cortante.
D) No se consideran las deformaciones por efecto de cargas axiales.
E) No se consideran las fuerzas de inercia causados por la rotación de la sección
recta.
Bajo las siguientes hipótesis se tiene en la figura.
∑FY = 0 y = v = desplazamiento vertical.
+V + p dx - (V+ ∂V ∂x) - Fi dx = 0
∂X
+V + pdx- V- ∂V dx - m dx ∂v = 0
∂X ∂t
p dx - ∂V dx - m dx ∂v = 0
∂X ∂t
m ∂ v + ∂v = P(x, t ) (1.1)
∂t ∂x
De la teoría de flexión se tiene:
(1) M = EI ∂V ó en nuestro caso M = EI ∂ V
∂X ∂x (1.2)
(2) V = ∂M
∂x
Derivando (2) tenemos:
∂V = ∂ ∂ M
∂X ∂X ∂ x
Sustituyendo 1.3 en 1.1
m ∂V + EI ∂ v = p (x,t)
∂t ∂x
EI ∂ V + m ∂ v = p (x,t) (1.4)
∂t ∂x
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 14
INGENIERIA SISMICA
En la ecuación anterior:
m= masa por unidad de longitud.
P(x,t) = Carga por unidad de longitud.
- Las derivaciones de (1.4), se hacen usando las derivadas parciales para
separar las aceleraciones y las variaciones de V y M, porque estas cantidades
son funciones de 2 variables, la posición de x a lo largo de viga y el tiempo.
- La ecuación (1.4) es una ecuación diferencial parcial de cuarto grado, es una
ecuación aproximada, ya que solo se han considerado las deflexiones por
flexión.
1.2.- METODOS DE FORMULACION DE LAS ECUACIONES DE
MOVIMIENTO
1.2.1.-Definición.- Se denomina ecuaciones de movimiento a las expresiones
matemáticas que definen las características de respuesta dinámica de una
estructura, las soluciones de estas ecuaciones representan la respuesta
estructural.
Las ecuaciones de movimiento de una estructura se pueden escribir
utilizando los siguientes principios de la mecánica clásica.
- Principio de D. Alembert.
- Principio de los desplazamientos generalizados.
- Principio de Hamilton.
A continuación se presentan brevemente estos principios.
1.2.2.-Método de Equilibrio Dinámico - Principio de D¨ Alembert.
Se basa en la segunda Ley de Newton, que establece "La razón de
velocidad de cambio de la cantidad de movimiento, Momentum, de una masa
(m), es igual a la fuerza que actúa sobre ella, esta relación es expresada
matemáticamente."
P(t) = d ( m dx ) 1.7
dt dt
donde: P(t) = Vector de fuerza aplicada.
X(t)= Vector de posición de la masa.
P(t) = m d x = m x (t)
dt
P(t) = m x (t) (1.8) m x (t) = ( fuerza de inercia)
La ecuación 1.8 puede ser escrita
P(t) – m x = 0
P(t) - f i = 0
La ecuación (1.10) representa el principio de D. Alembert, que establece que un
sistema puede estar en equilibrio dinámico, añadiendo a las fuerzas externas una
fuerza ficticia, conocida como la fuerza de inercia.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 15
INGENIERIA SISMICA
El equilibrio dinámico de un sistema esta asegurado si a cada instante todas las
fuerzas que actúan sobre el sistema, incluso las fuerzas de inercia, están en
equilibrio estático.
La figura (1.6) muestra un cuerpo con dos diagramas de cuerpo libre. El primero
contiene solamente las fuerzas externas y el segundo incluye la fuerza de inercia
(m x).
X m m
g g
K
K m K x Fi
x
M
M Fi=mx
mx
Fig. 1.2.2.- Modelo Mecánico de un Sistema de 1g.d.l.
Las fuerzas que actúan sobre un cuerpo cualquiera, están en equilibrio dinámico
con las fuerzas de inercia de las partículas del cuerpo. El análisis anterior debe
facilitar el desarrollo formal del principio de D Alembert y su aplicación al C.M.
de un cuerpo cualquiera.
En un sistema de "n" partículas, sea Fi la resultante de las fuerzas externas que
actúan sobre la i-esima partícula ∑fij la resultante de las fuerzas internas
ejercidas sobre la partícula por todas las demás partículas (fu =0, una partícula
no ejerce fuerza interna sobre si misma).
La segundas Ley de Newton dice que una partícula cualquiera puede expresarse
ahora Fi + Fij = mi ai , por lo tanto la suma de las fuerzas externas e internas
de todas las partículas del sistema es:
N n n
Fi + Fij = mi ai
i=1 i=1 j=1 i=1
1.3.- PRINCIPIO DE LOS TRABAJOS VIRTUALES
Si un sistema que esta en equilibrio bajo la acción de todas las fuerzas que lo
solicitan incluso las fuerzas de inercia, se actúan por desplazamientos virtuales,
entonces el trabajo mecánico efectuado por las fuerzas con dichos
desplazamientos, debe ser nula.
De acuerdo con este principio, las ecuaciones de movimiento se pueden obtener
expresando el trabajo mecánico virtual de las fuerzas con los desplazamientos
virtuales, introducidos según cada grado de libertad dinámica del sistema e
igualando con 0 (cero) la expresión que resulta.
Si un sistema estructural es complejo e involucra un numero de masas puntuales,
interconectadas o cuerpos de tamaño finito, el equilibrio directo de todas las
fuerzas que actúan en el sistema pueden resultar extremadamente dificultosos.
Frecuentemente las fuerzas pueden ser expresadas en términos de los grados de
libertad de los desplazamientos, es decir.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 16
INGENIERIA SISMICA
F = k a
Para el equilibrio puede resultar no muy claro, en este caso el principio de los
desplazamientos virtuales puede ser usado para plantear las ecuaciones de
movimiento como sistema sustituto de equilibrio dinámico.
El principio de los desplazamientos virtuales expresa: Si un sistema el cual esta
en equilibrio bajo la acción de un conducto de fuerzas, esta sujeto a un
desplazamiento virtual, es decir a cualquier desplazamiento arbitrario compatible
con las estructuraciones del sistema, el trabajo realizado por estas fuerzas sobre
los respectivos desplazamientos virtuales es nulo, es decir:
W= 0
De esta manera la ecuación respuesta de un sistema dinámico puede establecerse
identificado en primer lugar todas las fuerzas que actúan s0obre las masa del
sistema, incluyendo las fuerzas de inercia de acuerdo con el principio de
D,Alembert.
F2
Entonces las ecuaciones de movimiento Pueden ser
F1 obtenidas introduciendo los correspondientes
desplazamientos virtuales para (a), grado de libertad
e igualando el trabajo a cero.
La mayor ventaja de esta consideración es que el
trabajo es una magnitud escalar y puede ser sumado
de acuerdo con las reglas ordinarias del álgebra, en
cambio todas las fuerzas que actúan sobre la
estructura son magnitudes vectoriales y estas
pueden adicionarse o superponerse vectorialmente.
F3
Figura No 1.3.1
1.3.1._ Principio de Hamilton
El principio variacional mas aplicable es el principio de Hamilton, el cual se
expresa de la siguiente manera:
Π = ∫ (Ep - Ec)dt
Donde : Ep = Energía potencial.
Ec = Energía cinética desarrolladas en el sistema analizado.
El principio afirma que un sistema se halla en equilibrio dinámico si :
Donde : representa la variación funcional en el intervalo de tiempo (t1, t2).
Otro medio de enfocar el problema para establecer las ecuaciones vectoriales
del equilibrio haciendo uso de la energía en su forma variacional.
El concepto variacional mas aplicable es el principio de Hamilton, lo cual
puede ser expresado como:
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 17
INGENIERIA SISMICA
Donde: T= Energía cinética total del sistema.
V= Energía potencial del sistema, incluyendo la inercia de
deformación y potencial de cualquier sistema de fuerzas externas conservativas.
V= U + v cargas.
Wnc = Trabajo realizado por fuerzas no conservativas que actúan sobre
el sistema, incluyendo fuerzas resultantes de todo tipo de amortiguamiento y cualquier
tipo de cargas externas.
= A la variación tomada en un intervalo de tiempo.
L = T - V = potencial cinético, función lagrangiana.
El principio de Hamilton establece que la variación de la energía cinética y potencial
mas la variación del trabajo realizado por las fuerzas no conservativas durante algún
intervalo puede ser nula.
Es de interés notar que para el caso de que no existen fuerzas no consecutivas, la
ecuación anterior se transforma en:
También se debe notar que el principio de Hamilton puede aplicarse a problemas
estático, en este caso, la energía cinética T = 0 y los integrados serán independientes
del t, de modo que la ecuación anterior será:
Conocida como el principio de la energía potencial mínima que es ampliamente
usada en el análisis estructural (estático).
2.0.- SISTEMAS DE UN GRADO DE LIBERTAD
2.0.1.- Componentes Básicos del Sistema Dinámico.
X(t)
K
mm P(t)
Fig. 2.1
MODELO MATEMATICO PARA UN SISTEMA DE UN GRADO DE LIBERTAD.
Los componentes básicos mas esenciales de un sistema estructural, linealmente
elástico, sujeto a carga dinámica son :
MASA.- Un elemento m que representa la masa y las características de inercia
de la estructura.
La masa de la estructura esta saturado sobre el bloc rigido.
CONSTANTES ELASTICAS.- (rigidez o flexibilidad), la resistencia elástica
al desplazamiento es proporcional al resorte sin peso de rigidez k (k representa
exclusivamente la elasticidad)
CONSTANTE DE AMORTIGUAMIENTO O MECANISMO DE
DISIPACION DE ENERGIA.- Representado por el amortiguador (c).
FUENTES EXTERNAS DE EXITACION O CARGA (P(t)) .- Carga que
varia con el tiempo. Los rodillos del bloc (Fig. 2.1), obligan a este a moverse
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 18
INGENIERIA SISMICA
solamente en simple traslacion, entonces las coordenadas de desplazamiento (x),
que definen completamente su posición.
P(t)
P(t)
x= v
x
P(t)
X(t)
K1
K1 K2 K2
P(t)
Modelo masa resorte y Amortiguador.
K X(t)
P(t)
Figura No 2.1. Modelos de estructuras de un grado de libertad.
2.0.2.- FORMULACIÓN DE LA ECUACIÓN DE MOVIMIENTO.
2.0.2.1.- Método de Equilibrio o Principio de D´Alambert
La ecuación de movimiento para el sistema de la figura (2.1) se puede hallar por
cualquiera de los procedimientos discutidos en el capitulo anterior.
Para este caso emplearemos la ecuación de equilibrio de fuerzas.
P(t) S
P(t)
K
Tomando la sumatoria de fuerzas en x:
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 19
INGENIERIA SISMICA
Cada una de las fuerzas del primer miembro de la ecuación (2.1), son funciones del
desplazamiento x o de sus derivadas.
- Furza Elástica.- Esta dada por el producto de la rigidez del resorte y el
desplazamiento.
Fs = Kx
- Fuerza de Inercia.- Por el principio de D'Alembert, es igual al producto de la masa
por la aceleración.
Fi = M dx2/dt2
- Fuerza de Amortiguamiento.- Al considerar las fuerzas de Amortiguamiento en el
análisis dinámico de estructuras, es usual suponer que dichas fuerzas son proporcionales
ala magnitud de la velocidad y opuestas a la dirección del movimiento. Este tipo de
amortiguamiento es conocido como amortiguamiento viscoso, es del tipo de fuerza
amortiguadora que puede desarrollarse en un cuerpo que se mueve dentro de un fluido a
bajas velocidades.
Hay situaciones en las cuales las hipótesis de amortiguamiento viscoso son realistas y el
mecanismo de disipación es igualmente viscoso. Sin embargo la hipótesis de
amortiguamiento viscoso se hace a menudo independientemente de las características
disipativas del sistema. La razón principal del amplio uso del método es su simplicidad
matemática en el análisis.
Entonces si se admite un mecanismo de amortiguamiento viscoso, la fuerza de
amortiguamiento es el producto de la constante de amortiguamiento (c) por la velocidad
(x).
Fd = c dx/dt (2.4)
NOTA:
(Fertis pag.5-Dinamica de Estructuras) La amplitud de vibración de una estructura
amortiguada, que vibra libremente puede ser atenuada por las fuerzas resistentes
desarrolladas durante el movimiento, puesto que no es6ta sujeto a fuerzas excitadoras
externas que sostengan la vibración.
Las fuerzas resistentes disipa energía y con el tiempo terminan con la vibración, las
causas de tales acciones son muchas pero las ocasionadas por perdida de energía son
frecuentemente pequeñas y pueden ser despreciadas en el análisis de muchas estructuras
de ingeniería.
Los tipos comunes de amortiguamiento son : Viscoso, de Coulomb y el de Histéresis .
Amortiguamiento Viscoso.- esta usualmente asociado con los cuerpos que se mueven
dentro de fluidos a bajas velocidades. En este caso se supone que la fuerza
amortiguadora es proporcional a la primera potencia de la velocidad de movimiento.
Donde : C = constante de resistencia por unidad de velocidad.
Amortiguamiento Seco o de Coulomb.- Esta asociado con el desplazamiento de los
cuerpos sobre superficies secas y la fuerza resistente esta dada por
Donde : u = coeficiente de fricción cinética del material.
N = Fuerza normal.
Este tipo de fuerza depende de la fuerza normal, la naturaleza de la superficie de
deslizamiento y las características del material.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 20
INGENIERIA SISMICA
Amortiguamiento Historietico.- Llamado también Amortiguamiento estructural esta
asociado con la fricción interna del material y es igualmente proporcional a la amplitud
del desplazamiento del cuerpo deformado, es independiente de la frecuencia de
vibración y es el resultado de la fricción entre planos internos que deslizan durante la
deformación del cuerpo. La energía absorbida de esta manera esta disipada en forma de
calor.
La pérdida de energía ( AV ) por ciclos de movimiento es el área dentro del anillo en
las cargas** fuerza desplazamiento. En la figura, F es la fuerza en el resorte, x es el
desplazamiento y X es la amplitud de vibración.
Los experimentos han mostrado que (AV) es igualmente proporcional al cuadrado de la
amplitud.
Donde : K = Rigidez del resorte .
Co = Constante Dimensional del material por amortiguamiento sólido.
F
X X
Remplazando la ecuación (2.2), (2.3), (2.4) en 2.1 tenemos
Mx + Cx +Kx = p(t)
(2.5)
B) POR EL METODO DE LOS DESPLAZAMIENTOS O TRABAJOS
VIRTUALES
Las fuerza actuantes están indicadas en la fig (2.1).
Consideremos un desplazamiento virtual Sx en la dirección x y aplicando el principio
del trabajo virtual tenemos:
x
Consideremos un desplazamiento virtual Sx en
δx la Dirección y aplicando el principio del trabajo
.
Fd virtual. Los signos resultantes (-) debido a que
P(t) las fuerzas Son opuestas ala direccion de los
Fi desplazamientos Virtuales .
Fs
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 21
INGENIERIA SISMICA
Sustituyendo los valores de (2.2),(2.3) y (2.4) tenemos:
mx + cx + kx = P(t)
C) POR EL PRINCIPIO DE HAMILTON'S
ʃ δL dt = ʃ δWnc dt = 0
Donde L = T - V
La inercia cinética del sistema, esta definida por:
T = ½ m (dx/dt) 2 o T = 1/2 ʃ m (dx/dt)2 dx
Mientras la energía potencial:
V= U = ½ Kx 2 o U = 1/2 ʃ E I x2 dx
Las fuerzas no conservativas del sistema fig. (2.1) son las fuerzas de amortiguamiento
Fd y la carga aplicada P(t). La variación del trabajo generado por estas fuerzas puede
estar expresada:
δ Wnc = F δ x = ( P(T) –Fd) δx
δ Wnc = P(T) δx - Fd δx
Como es el equivalente al trabajo virtual , la expresión esta asociada con las fuerzas de
la ecuación (2.6), por lo tanto tenemos:
Remplazando en la ecuación general.
Integrando las partes la Primera Integral
De donde :
De donde resulta:
Para hallar la integral por partes.
Haciendo:
Ya que:
Ahora el primer termino puede ser integrado por partes como:
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 22
INGENIERIA SISMICA
La variación dx esta limitada por la integral t1 y t2 al primer termino es 0.
Para hallar la integral por partes:
Haciendo X = mx , dx = mx dt
Ya que d(mx) = d
PARA HALLAR LA INTEGRAL POR PARTES
Haciendo:
Ya que
D) METODO LAGRANGIANO
2.0.3.- INFLUENCIA DE LAS FUERZAS GRABVITACIONALES.- (SOOF)
Consideremos ahora el sistema metrado vibrante en Fig. (2.2 a), rotado 90 grados,
afectado por fuerzas gravitacionales en la dirección del desplazamiento. El sistema de
fuerzas que actúan en la masa en la Fig. (2.2 b) por equilibrio de fuerzas tenemos:
Mx + cx + kx = p(t) + W (2.6)
Donde: W = pese del bloque rígido
Si el desplazamiento total x es expresado como la variación del desplazamiento estático
(A *) causado popr el peso W, adicional al desplazamiento dinamíco (x ), se tiene:
Entonces la fuerza en el resorte es:
Remplazando en la ecuación (2.6) tenemos
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 23
INGENIERIA SISMICA
Pero
Diferenciando la ecuación (2.7) tenemos y notando que AST no varía con el tiempo, se
tiene:
Entonces la ecuación (2.9), puede escribirse:
Mx + cx + kx = p(t) (2.10)
Comparando las ecuaciones (2.10) y (2.5), se demuestra que la ecuación de movimiento
expresado con referencia a la posición de equilibrio estático del sistema dinámico no es
afectado por la fuerza de gravedad. Por esta razón los desplazamientos en todas las
discusiones futuras serán referidas a la posición estática y los desplazamientos que se
determinen serán la respuesta dinámica.
Entonces los desplazamientos totales, esfuerzos, etc. Pueden obtenerse añadiendo las
cantidades estáticas a los resultados del análisis dinámico.
2.4.- INFLUENCIA DE EXCITACION EN LA BASE DE LA ESTRUCTURA
Los esfuerzos y deflexiones dinámicas pueden ser inducidas en una estructura
no solamente por una carga aplicada que varíe con el tiempo sino también por
movimientos de sus puntos de soporte, Ejm. Importantes de tal excitación son los
movimientos de los miembros de un equipo debido a vibraciones de edificio en el cual
esta alojado.
Un modelo simplificado del problema de excitación sísmica se muestra en la Fig. (2.3),
en el cual el movimiento horizontal del suelo causado por el sismo esta indicado por el
desplazamiento (Xo ó Xg), de la base de la estructura relativo a un eje fijo de referencia.
Xt
x
Fi
EJE DE REFERENCIA
Fs/2 Fd Fs/2
K/2
K/2
Xo (t)
Registro del Fig 2.4
Sismo
Tiempo
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 24
INGENIERIA SISMICA
Xt = Desplazamiento total.
X = Desplazamiento relativo con respecto a la cimentación.
Xo(t)= Desplazamiento debido al sismo.
HIPOTESIS:
- La viga horizontal del arco es infinitamente rígido e incluye todo el marco de
estructura.
- Que las columnas verticales que sostienen el peso y son inextensibles en la
dirección vertical.
- Que la resistencia al desplazamiento de la viga que le comunica a cada
columna esta representada por la constante del resorte (k/2).
Entonces la masa, tiene un solo grado de libertad, x , el cual esta asociado en la
flexión de la columna. El amortiguador c produce una resistencia proporcional a
la velocidad resistente a esta deformación.
Del equilibrio de fuerzas del sistema tenemos:
FI + FD + FS = 0 (2.11)
Donde:
Remplazando en (2.11)
Mxt + cx + kx = 0 (2.12)
Esta ecuación debe ser expresada en términos de una sola variable, para esto, se
aprecia que el movimiento total de la masa puede expresarse como la suma del
movimiento del suelo y la distorsión del suelo y la distorsión de las columnas, es
decir:
Xt = Xo(t)r x (2.13)
Diferenciando:
Puesto que la aceleración del terreno represente la energía dinámica recibida por
la estructura, la ecuación de movimiento puede escribirse como:
Mx + cx +kx = -mx 2.15
En esta ecuación mx denota la carga de excitación efectiva en la base de la
estructura. En otras palabras la estructura responde a la aceleración del terreno,
X0 (t) , escuetamente como si existiera, una carga externa P(t), igual al producto
de la masa por la aceleración del terreno.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 25
INGENIERIA SISMICA
El signo negativo de la ecuación (2.15) indica que la fuerza efectiva, se opone a
la aceleración del terreno lo cual tiene poca importancia en la practica, puesto
que la fuerza en la base, se supone que actúa en dirección arbitraria.
2.0.5.- GENERALIZACIÓN DEL SISTEMA DE UN GRADO DE
LIBERTAD
2.0.5.1.- ELEMENTOS CON CUERPOS RIGIDOS
Todos los casos considerados anteriormente tienen entonces sencillos por
las propiedades físicas como masa, amortiguamiento y elasticidad, fueron
representados por elementos singulares discretos. Para propósito de esta
discusión es posible identificar dos casos de generalización de sistemas de un
grado de libertad de estructuras : (1) elementos de cuerpos rígidos en los cuales
las deformaciones elásticas están limitadas enteramente por elementos
resistentes localizados (2) Sistemas con distribución elástica en las cuales las
deformaciones pueden ser continuas para toda la estructura. A lo largo de estas
componentes.
En ambos casos, la estructura esta forzada a portarse tendiente a un sistema de
un grado de libertad, pero asumiendo que los desplazamientos son solo de la
forma antes indicada para la clase de estructuras de elementos de cuerpo rígido
discutidos en esta sección, la limitación esta dado solo en la forma de loa
desplazamientos, frecuentemente como consecuencia de la configuración del
elemento, el elemento rígido esta forzado pero dependiente del tipo de
desplazamiento en lo posible.
El SDOF restringe formas, asumiendo la distribución de la elástica, actualmente
una variedad infinita de desplazamientos.
En la formulación las ecuaciones de movimiento de los sistemas rígidos, las
fuerzas desarrolladas por los desplazamientos en SDOF pueden ser: expresados
fácilmente en términos de las amplitudes de desplazamiento porque cada
elemento elástico puede ser un salto discreto subjetivo de una deformación
especifica.
Si Alármente** las fuerzas amortiguadoras pueden ser en términos de las
velocidades especificadas de los puntos de unión adheridos del amortiguamiento
discreto. De otro lado la masa del cuerpo rígido no necesita estar localizado, y la
distribución de los fuerza de inercia como resultado de Las aceleraciones. Sin
embargo para los propósitos del análisis dinámico, es usual y efectivo tratar los
cuerpos rígidos , las fuerzas de inercia debidas a la masa y el momento de inercia
de la masa, concentrados en el centro de la masa, las fuerzas de inercia
resultantes, las cuales son obtenidas de esa forma, son igualmente equivalentes a
las fuerzas de inercia distribuidas (similarmente esta es deseable para una
representación de carga externa distribuida uniformemente en el cuerpo rígido,
es igualmente equivalente por las fuerzas resultantes ). La masa y el momento de
inercia de una viga uniforme y de un plato uniforme de varias formas son
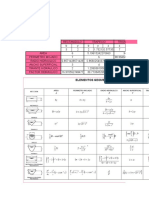
suministradas en la figura adjunta para una referencia conveniente.
2.0.6.- MOMENTOS DE INERCIA DE MASAS
El plantear las ecuaciones de equilibrio dinámico de cuerpos rígidos es
necesario conocer los momentos de inercia de las masas, algunos de ellos se ven
a continuación:
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 26
INGENIERIA SISMICA
PARA UNA BARRA UNIFORME
Donde m = masa / unidad de longitud
Io = mL²/ 12
L /2
m = mL
L /2
PLACA RECTANGULAR UNIFORME
a/2 a /2
Io = m ( a² + b² )
2
b m
2 m = γab
= γab
γ= masa / masa
b
2
PLACA UNIFORME RECTANGULAR
m
2b/3
Io = m (a² + b² )/ 18
m = γ ab
b/3 2
a 2a
3 3
PLACA UNIFORME TRIANGULAR
b/2 m Io = m (a² + b² )
16
m = γab/ 2
b/2
a/2 a/2
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 27
INGENIERIA SISMICA
Ejemplo: E.2.1
Un ejemplo de un sistema de cuerpo rígido, consiste en dos barras rígidas conectadas por una
rótula en B y soportada por un pivote en A y un apoyo móvil en C. La excitación dinámica es
proveniente de una carga transversal P(x,t) variando linealmente a lo largo de la barra AB.
P(x,t) = P x/a 3(t)
m2
m
K2
C1 K1 C2
a 2a a a a a
Asumamos que las dos barras son rígidas, este sistema tiene solamente un grado de libertad y la
respuesta dinámica puede ser expresada como una forma de ecuación de movimiento. Esta
ecuación deberá estar formulada del equilibrio directo.
Por la complejidad del sistema es conveniente usar la formulación por trabajo o energía. El
análisis por el trabajo virtual puede ser empleado aquí. Aunque el principio de Hamiltons deberá
ser igualmente efectivo.
Mag. Ing. Roberto Mosqueira Ramírez.
Mag. Ing. Miguel Ángel Mosqueira Moreno Página 28
También podría gustarte
- 7121-EF-Richard Alberto Suárez PortalDocumento22 páginas7121-EF-Richard Alberto Suárez PortalDiego VillanuevaAún no hay calificaciones
- Ejercicio 3Documento8 páginasEjercicio 3Diego VillanuevaAún no hay calificaciones
- Formato de PaperDocumento6 páginasFormato de PaperDiego VillanuevaAún no hay calificaciones
- 7121-EF-Richard Alberto Suárez PortalDocumento22 páginas7121-EF-Richard Alberto Suárez PortalDiego VillanuevaAún no hay calificaciones
- Eb JesusDocumento4 páginasEb JesusDiego VillanuevaAún no hay calificaciones
- 7121-EF-Richard Alberto Suárez PortalDocumento22 páginas7121-EF-Richard Alberto Suárez PortalDiego VillanuevaAún no hay calificaciones
- Hidrología - Solucionario Examen Final 2020 IDocumento37 páginasHidrología - Solucionario Examen Final 2020 IDiego VillanuevaAún no hay calificaciones
- 7121-EF-Richard Alberto Suárez PortalDocumento22 páginas7121-EF-Richard Alberto Suárez PortalDiego VillanuevaAún no hay calificaciones
- Informe T2Documento10 páginasInforme T2Diego VillanuevaAún no hay calificaciones
- Diseño de Pavimento Rigido (Metodo de La Aashto - 1993)Documento12 páginasDiseño de Pavimento Rigido (Metodo de La Aashto - 1993)Diego VillanuevaAún no hay calificaciones
- 7121-EF-Richard Alberto Suárez PortalDocumento22 páginas7121-EF-Richard Alberto Suárez PortalDiego VillanuevaAún no hay calificaciones
- Copia de VIGASDocumento18 páginasCopia de VIGASDiego VillanuevaAún no hay calificaciones
- Plantilla HidraulicaDocumento70 páginasPlantilla HidraulicaDiego VillanuevaAún no hay calificaciones
- Hidrología - Solucionario Examen Final 2020 IDocumento37 páginasHidrología - Solucionario Examen Final 2020 IDiego VillanuevaAún no hay calificaciones
- Ejercicios Resueltos de Estructuras HidraulicasDocumento58 páginasEjercicios Resueltos de Estructuras HidraulicasJuan Royer TURPO CONDORI82% (123)
- Temas Ef - 2021.1Documento4 páginasTemas Ef - 2021.1Diego VillanuevaAún no hay calificaciones
- Durabilidad Del Concreto CompletoDocumento13 páginasDurabilidad Del Concreto CompletoCristianAngelBasilioRuizAún no hay calificaciones
- Articulo de Metodos de Ion ACIDocumento11 páginasArticulo de Metodos de Ion ACIEduard OrellanaAún no hay calificaciones
- Mejoramiento y Estabilidad de Suelos Con Fines de CimentaciónDocumento7 páginasMejoramiento y Estabilidad de Suelos Con Fines de CimentaciónDiego Villanueva100% (1)
- Construcción de vivienda multifamiliar en CajamarcaDocumento4 páginasConstrucción de vivienda multifamiliar en CajamarcaDiego VillanuevaAún no hay calificaciones
- Tensión Superficial y Capilaridad - TeoríaDocumento7 páginasTensión Superficial y Capilaridad - TeoríaDiego VillanuevaAún no hay calificaciones
- 2.PARTE2 Peligro VulneraDocumento126 páginas2.PARTE2 Peligro VulneraDiego VillanuevaAún no hay calificaciones
- Problemas SismicaDocumento2 páginasProblemas SismicaJhampier Sánchez ZambranoAún no hay calificaciones
- Puentes Con AASHTO LRFD 2014 - Ing. Arturo Rodríguez Serquén PDFDocumento342 páginasPuentes Con AASHTO LRFD 2014 - Ing. Arturo Rodríguez Serquén PDFMarvil Hagler Rimarachin Diaz0% (1)
- Clase Generación DirectaDocumento12 páginasClase Generación DirectaDiego VillanuevaAún no hay calificaciones
- Anexo6 Presupuesto General y CronogramaDocumento10 páginasAnexo6 Presupuesto General y CronogramaDiego VillanuevaAún no hay calificaciones
- Sesión 05-Presión y Estática de FluidosDocumento26 páginasSesión 05-Presión y Estática de FluidosDiego VillanuevaAún no hay calificaciones
- Sesión 07-Fuerzas Sobre Superficies Planas y Curvas.Documento34 páginasSesión 07-Fuerzas Sobre Superficies Planas y Curvas.Diego VillanuevaAún no hay calificaciones
- 1 0 4032 PDFDocumento27 páginas1 0 4032 PDFIrma Floriano ChavezAún no hay calificaciones
- Especificaciones Tecnicas 170204023718Documento74 páginasEspecificaciones Tecnicas 170204023718jakcitoAún no hay calificaciones
- El Fantasma Enamorado - Jonathan CarrollDocumento476 páginasEl Fantasma Enamorado - Jonathan CarrollSamantha Rojas GuzmanAún no hay calificaciones
- Tarea de FilosofiaDocumento6 páginasTarea de FilosofiaSamuel MoncadaAún no hay calificaciones
- Egb-Sm Guía Didáctica de Implementación Curricular CCNNDocumento128 páginasEgb-Sm Guía Didáctica de Implementación Curricular CCNNLuz VillarroelAún no hay calificaciones
- Politica Ambiental Abc 2020Documento2 páginasPolitica Ambiental Abc 2020Dennis Alexander Rojas BicerraAún no hay calificaciones
- Programa Aulas Emocionalmente Seguras: Una Apuesta Por Fortalecer La Docencia Desde Lo HumanoDocumento14 páginasPrograma Aulas Emocionalmente Seguras: Una Apuesta Por Fortalecer La Docencia Desde Lo HumanoHakuna MatataAún no hay calificaciones
- 63 Pares Biomagneticos Emocionales GraficadosDocumento15 páginas63 Pares Biomagneticos Emocionales GraficadosPablo Carrasco75% (40)
- Ejemplo de Guión de Entrevista EstructuradaDocumento2 páginasEjemplo de Guión de Entrevista EstructuradaOmar Mendoza Carrillo50% (4)
- Tilin Analisis de Proteinas en Harina de Trigo HPLCDocumento10 páginasTilin Analisis de Proteinas en Harina de Trigo HPLCRoberto BocanegraAún no hay calificaciones
- Caso Turismo Baldeon - CalderonDocumento38 páginasCaso Turismo Baldeon - CalderonJhon Alex Baldeon CondoriAún no hay calificaciones
- Poscosecha de La NaranjaDocumento14 páginasPoscosecha de La NaranjaCatalina RamosAún no hay calificaciones
- ES PP2EG NIC Fall2021-FinalDocumento25 páginasES PP2EG NIC Fall2021-FinalAxel Mauricio Gámez EscobarAún no hay calificaciones
- Compactmig200 Ficha TecnicaDocumento2 páginasCompactmig200 Ficha TecnicaSergio GálvezAún no hay calificaciones
- Carrera Ingeniería Comercial Tesis de GradoDocumento164 páginasCarrera Ingeniería Comercial Tesis de GradoTeddy CuellarAún no hay calificaciones
- Destilacion en Columna MenorDocumento3 páginasDestilacion en Columna MenorAbner LugoAún no hay calificaciones
- Ficha 06 Identificamos Las Potencialidades de Nustra LocalidadDocumento2 páginasFicha 06 Identificamos Las Potencialidades de Nustra LocalidadElmer Aranda AltamiranoAún no hay calificaciones
- Actividades GymkanaDocumento6 páginasActividades GymkanaManuel Jalón RojasAún no hay calificaciones
- Informe de TopografiaDocumento19 páginasInforme de Topografiaaldo15Aún no hay calificaciones
- Taller Biologia RepasoDocumento2 páginasTaller Biologia RepasoYesidLucianoRojasMottaAún no hay calificaciones
- Taller No. 01 Identificación de Parámetros BásicoDocumento2 páginasTaller No. 01 Identificación de Parámetros BásicoJohan Steven GAún no hay calificaciones
- SEGDDocumento27 páginasSEGDPablo kovaAún no hay calificaciones
- Teorema de Liouville (Mecánica Hamiltoniana)Documento3 páginasTeorema de Liouville (Mecánica Hamiltoniana)CARMEN MARIA BILLALOGOSAún no hay calificaciones
- Analisis Ambiental de BoliviaDocumento2 páginasAnalisis Ambiental de BoliviaJohn Fisher SlimAún no hay calificaciones
- Artritis ReumatoideDocumento5 páginasArtritis ReumatoidepeleshAún no hay calificaciones
- Informe Manual de SeñalizaciónDocumento26 páginasInforme Manual de SeñalizaciónCristian MendozaAún no hay calificaciones
- Acta Recepcion ObraDocumento9 páginasActa Recepcion ObraLuis Garcia KrieteAún no hay calificaciones
- Calculo de Aire en TuberiasDocumento11 páginasCalculo de Aire en TuberiasJuan Carlos Gutierrez ReyesAún no hay calificaciones
- Línea de Tiempo Evolucion de Las ComputadorasDocumento5 páginasLínea de Tiempo Evolucion de Las ComputadorasAlanAún no hay calificaciones
- Cuadernillo de SilabasDocumento163 páginasCuadernillo de Silabasnereida diaz100% (1)
- MPFD0801F02-05: Página 1 de 5Documento5 páginasMPFD0801F02-05: Página 1 de 5Soraima LeguizamonAún no hay calificaciones
- LACTEOSDocumento23 páginasLACTEOSNatali Flores TiburcioAún no hay calificaciones