También podría gustarte
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- CPST Informe3 ZambranoJ PDFDocumento5 páginasCPST Informe3 ZambranoJ PDFJuan Diego Zambrano TorresAún no hay calificaciones
- Amplificador de instrumentación: características y aplicaciones médicasDocumento3 páginasAmplificador de instrumentación: características y aplicaciones médicasAngie OrtegaAún no hay calificaciones
- Amplificadores de instrumentación y operacionalesDocumento6 páginasAmplificadores de instrumentación y operacionalesRubén PérezAún no hay calificaciones
- 111 Unidad 2 - Adecuación de Señales AnalógicasDocumento18 páginas111 Unidad 2 - Adecuación de Señales AnalógicasAndresAún no hay calificaciones
- Amplificadores OperacionalesDocumento14 páginasAmplificadores OperacionalesNelson ArismendiAún no hay calificaciones
- Prac12 Eq2 5am4Documento13 páginasPrac12 Eq2 5am4daniel guierrez padronAún no hay calificaciones
- AcondicionadorDocumento11 páginasAcondicionadorSantiago Espitia TorresAún no hay calificaciones
- Laboratorio 2 Amplificador de Instrumentación RespuestaDocumento5 páginasLaboratorio 2 Amplificador de Instrumentación RespuestaNicolas CordobaAún no hay calificaciones
- Umsnh. Fie. Laboratorio de Instrumentación I. Práctica #4 - El Amplificador de Instrumentación Básico. Gregorio de Jesús Arciga Espinosa. 1566997EDocumento10 páginasUmsnh. Fie. Laboratorio de Instrumentación I. Práctica #4 - El Amplificador de Instrumentación Básico. Gregorio de Jesús Arciga Espinosa. 1566997EGregorio ArcigaAún no hay calificaciones
- Amplificador de InstrumentacionDocumento5 páginasAmplificador de InstrumentacionKerlly AsencioAún no hay calificaciones
- Tarea 2 - Grupo 63Documento25 páginasTarea 2 - Grupo 63Mateo SogaAún no hay calificaciones
- Afsm P7Documento6 páginasAfsm P7AnahiAún no hay calificaciones
- Informe 1Documento21 páginasInforme 1Iván Darío Yaber ManotasAún no hay calificaciones
- _Laboratorio 5 - Ele 3.docxDocumento5 páginas_Laboratorio 5 - Ele 3.docxSofia QuirogaAún no hay calificaciones
- Practica1 Lab ING BIOMEDICADocumento3 páginasPractica1 Lab ING BIOMEDICAPedro RodriguezAún no hay calificaciones
- Amplificador de instrumentación, filtros y conversión ADCDocumento18 páginasAmplificador de instrumentación, filtros y conversión ADCCindy RojasAún no hay calificaciones
- Amplificador de InstrumentaciónDocumento3 páginasAmplificador de InstrumentaciónBrandon LoaizaAún no hay calificaciones
- Tarea2 WDocumento10 páginasTarea2 WWILSON GIOVANNY ALPALA GALVISAún no hay calificaciones
- LABORATORIO 07 - Grupo 8Documento5 páginasLABORATORIO 07 - Grupo 8alejandro.ordonezAún no hay calificaciones
- Unidad - 2 - Tarea - 2 v2Documento34 páginasUnidad - 2 - Tarea - 2 v2Manuel AldanaAún no hay calificaciones
- Práctica 1 - El Amplificador OperacionalDocumento9 páginasPráctica 1 - El Amplificador OperacionalCesar AguilarAún no hay calificaciones
- Amplificador de Instrumentación - Práctica 1Documento11 páginasAmplificador de Instrumentación - Práctica 1imt.jlgc100% (1)
- Informe 1 A.ODocumento16 páginasInforme 1 A.OAriana Rocha MendezAún no hay calificaciones
- Laboratio Amplificador de Instrumantacion L.Documento6 páginasLaboratio Amplificador de Instrumantacion L.Angie ValenciaAún no hay calificaciones
- Medición de ancho de banda e impedancia de entrada en amplificador operacionalDocumento8 páginasMedición de ancho de banda e impedancia de entrada en amplificador operacionallaura torresAún no hay calificaciones
- Espectrometria GammaDocumento6 páginasEspectrometria GammaGiulianna Rodriguez100% (1)
- Prac11 Eq2 5am4Documento15 páginasPrac11 Eq2 5am4daniel guierrez padronAún no hay calificaciones
- Informe de Laboratorio Analogica.Documento4 páginasInforme de Laboratorio Analogica.Daniela Paez BoteroAún no hay calificaciones
- PL 1 Plasencia Celestino - Sya BiomedicosDocumento8 páginasPL 1 Plasencia Celestino - Sya BiomedicosRENZO PLASENCIA CELESTINOAún no hay calificaciones
- Amplificadores OperacionalesDocumento14 páginasAmplificadores OperacionalesNelson ArismendiAún no hay calificaciones
- Lab 3Documento8 páginasLab 3MORALES BENITES JUAN FABIANAún no hay calificaciones
- Práctica 2Documento12 páginasPráctica 2Luis RamirezAún no hay calificaciones
- Unidad 2 Tarea 2Documento26 páginasUnidad 2 Tarea 2Comark PongutaAún no hay calificaciones
- Unidad 2 (Instrumentación)Documento17 páginasUnidad 2 (Instrumentación)Cristian VillegasAún no hay calificaciones
- Informe Lab. 1 BiointrDocumento6 páginasInforme Lab. 1 BiointrCatalina PerezAún no hay calificaciones
- Lab Bioinstru 3.docx - CompressedDocumento12 páginasLab Bioinstru 3.docx - CompressedDario CaphistAún no hay calificaciones
- Actividad Semana 7 David Collaguazo 4672Documento7 páginasActividad Semana 7 David Collaguazo 4672DAVID ISMAEL COLLAGUAZO AMORESAún no hay calificaciones
- LABORATORIO No. 1 - CARACTERÍSTICAS DEL AMPLIFICADOR OPERACIONALDocumento5 páginasLABORATORIO No. 1 - CARACTERÍSTICAS DEL AMPLIFICADOR OPERACIONALCarlos RamirezAún no hay calificaciones
- Pr6 EQ2 5AM4Documento9 páginasPr6 EQ2 5AM4daniel guierrez padronAún no hay calificaciones
- LABORATORIO 12 - 2020 - 2 - Filtros Pasivos Parte IDocumento7 páginasLABORATORIO 12 - 2020 - 2 - Filtros Pasivos Parte IEduardo Arce0% (1)
- Practica 5 Control 1Documento5 páginasPractica 5 Control 1Angel HernándezAún no hay calificaciones
- Lab 1Documento9 páginasLab 1Andres Felipe Torres CelyAún no hay calificaciones
- Aplicaciones LinealesDocumento35 páginasAplicaciones LinealesLuis Fernando Carrera AcostaAún no hay calificaciones
- G1 Ampl Inst DSM04L DF200465Documento20 páginasG1 Ampl Inst DSM04L DF200465Ricardo Andres Del Aguila FloresAún no hay calificaciones
- Practica 4 AmplificadoresDocumento11 páginasPractica 4 AmplificadoresDavid Alejandro Aguirre CárdenasAún no hay calificaciones
- Practica 2 - Amplificadores - PT100Documento9 páginasPractica 2 - Amplificadores - PT100Angie García RíosAún no hay calificaciones
- P5 Leaii 2022 Parametros Reales Amplif OpDocumento6 páginasP5 Leaii 2022 Parametros Reales Amplif OpAlejandro Baldemar Gomez VazquezAún no hay calificaciones
- Aplicaciones de Las Señales EmgDocumento5 páginasAplicaciones de Las Señales EmgyerssonAún no hay calificaciones
- Pos Tarea - Consolidado 299016 - 4Documento18 páginasPos Tarea - Consolidado 299016 - 4Yeison OjedaAún no hay calificaciones
- Guía de aprendizaje sobre amplificadores operacionalesDocumento13 páginasGuía de aprendizaje sobre amplificadores operacionalesJaime Andrés Prada TorresAún no hay calificaciones
- Amplificador de Instrumentación - Lab4Documento10 páginasAmplificador de Instrumentación - Lab4Lorena TellezAún no hay calificaciones
- INI Guia 1Documento6 páginasINI Guia 1danielfunesperezAún no hay calificaciones
- Práctica 3Documento12 páginasPráctica 3Fernando LópezAún no hay calificaciones
- Informe de Laboratorio de Amplificadores de InstrumentaciónDocumento8 páginasInforme de Laboratorio de Amplificadores de InstrumentaciónNicolás Muñoz Arias100% (2)
- Laboratorio 1 Amplificadores Inversor-No Inversor 2.Documento8 páginasLaboratorio 1 Amplificadores Inversor-No Inversor 2.Camilo Gutierrez VasquezAún no hay calificaciones
- Prac6 Eq2 5am4Documento13 páginasPrac6 Eq2 5am4daniel guierrez padronAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- 100 Circuitos de Audio (ES) - volume 1De Everand100 Circuitos de Audio (ES) - volume 1Calificación: 5 de 5 estrellas5/5 (2)
- Coti 10, Maria AuxiliadoraDocumento1 páginaCoti 10, Maria AuxiliadoraroyAún no hay calificaciones
- Check List Sistema A Cceb SurcoDocumento2 páginasCheck List Sistema A Cceb SurcoroyAún no hay calificaciones
- Coti. 0012Documento1 páginaCoti. 0012royAún no hay calificaciones
- Mi Mu - M - CTR - KJRP 75abk e EsDocumento20 páginasMi Mu - M - CTR - KJRP 75abk e EsroyAún no hay calificaciones
- PT800 - Presion - Transmisor de Presion de AguaDocumento3 páginasPT800 - Presion - Transmisor de Presion de AguaroyAún no hay calificaciones
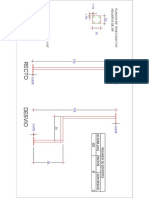
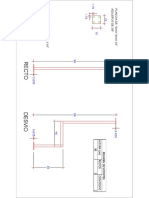
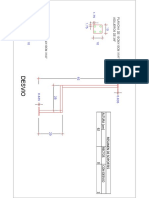
- Esquema eléctrico sistema bombeo 2 bombas 2 válvulasDocumento1 páginaEsquema eléctrico sistema bombeo 2 bombas 2 válvulasroyAún no hay calificaciones
- Opt ST C2 Pno Pla Etc 01 Ptar 003 Rev0Documento3 páginasOpt ST C2 Pno Pla Etc 01 Ptar 003 Rev0royAún no hay calificaciones
- TYPSA02Documento2 páginasTYPSA02royAún no hay calificaciones
- CONTROLDocumento1 páginaCONTROLroyAún no hay calificaciones
- IIEE Diagrama Unifilar Maria Auxiliadora 10.02.2023Documento2 páginasIIEE Diagrama Unifilar Maria Auxiliadora 10.02.2023royAún no hay calificaciones
- Opt ST C2 Pno Pla Etc 01 Ptar 001 Rev0Documento3 páginasOpt ST C2 Pno Pla Etc 01 Ptar 001 Rev0royAún no hay calificaciones
- Opt ST C2 Pno Pla Etc 01 Ptar 002 Rev0Documento6 páginasOpt ST C2 Pno Pla Etc 01 Ptar 002 Rev0royAún no hay calificaciones
- Cir02 Hvac Eett 01Documento19 páginasCir02 Hvac Eett 01royAún no hay calificaciones
- BASES DE ALTURA 103cmDocumento1 páginaBASES DE ALTURA 103cmroyAún no hay calificaciones
- BASES DE ALTURA 104cmDocumento1 páginaBASES DE ALTURA 104cmroyAún no hay calificaciones
- BASES DE ALTURA 102cmDocumento1 páginaBASES DE ALTURA 102cmroyAún no hay calificaciones
- Formato N 02 - Matriz Gestión de Riesgos Seguridad - v06..-2Documento3 páginasFormato N 02 - Matriz Gestión de Riesgos Seguridad - v06..-2royAún no hay calificaciones
- BASES DE ALTURA 101cmDocumento1 páginaBASES DE ALTURA 101cmroyAún no hay calificaciones
- Cot Electric Almace CallaoDocumento1 páginaCot Electric Almace CallaoroyAún no hay calificaciones
- Bases de Altura 98cmDocumento1 páginaBases de Altura 98cmroyAún no hay calificaciones
- Bases de Altura 100cmDocumento1 páginaBases de Altura 100cmroyAún no hay calificaciones
- Taller - Iperc - Identificacion de Peligros y Evaluacion de Riesgos (Autoguardado)Documento48 páginasTaller - Iperc - Identificacion de Peligros y Evaluacion de Riesgos (Autoguardado)royAún no hay calificaciones
- Silabo SSOMAC - SUPERVISORDocumento8 páginasSilabo SSOMAC - SUPERVISORroyAún no hay calificaciones
- BASES DE ALTURA 62cmDocumento1 páginaBASES DE ALTURA 62cmroyAún no hay calificaciones
- Cotizacion - Elect - Laborat (2) .Documento1 páginaCotizacion - Elect - Laborat (2) .royAún no hay calificaciones
- Texto Pata El Izaje de Los ChillerDocumento1 páginaTexto Pata El Izaje de Los ChillerroyAún no hay calificaciones
- Cot 21 0016 P RL 01 JE&COPDocumento1 páginaCot 21 0016 P RL 01 JE&COProyAún no hay calificaciones
- Instructivo Estudios Diplomado SSOMACDocumento4 páginasInstructivo Estudios Diplomado SSOMACroyAún no hay calificaciones
- Resumen: Inverter) y Puente Completo Convencional, Mientras Que El Inversor de Tres Niveles, También VSIDocumento101 páginasResumen: Inverter) y Puente Completo Convencional, Mientras Que El Inversor de Tres Niveles, También VSIOSCAR ALEJANDRO GUERRERO GUERREROAún no hay calificaciones
- Diseño de armadura para vigas sometidas a flexiónDocumento1 páginaDiseño de armadura para vigas sometidas a flexiónAndres CasanovaAún no hay calificaciones
- Probl Cap 3 Induccion en ArmaduraDocumento9 páginasProbl Cap 3 Induccion en ArmaduranelsonAún no hay calificaciones
- Tipos de Reservorio de Petroleo NegroDocumento11 páginasTipos de Reservorio de Petroleo NegroJesica Cabrera RochaAún no hay calificaciones
- Procedimiento de Inspección Mediante Partículas MagnéticasDocumento9 páginasProcedimiento de Inspección Mediante Partículas MagnéticasAna QUISPEAún no hay calificaciones
- Capitulo I PayrollDocumento31 páginasCapitulo I PayrollKmilynne SpearsAún no hay calificaciones
- Gramatica Francesa EsencialDocumento56 páginasGramatica Francesa EsencialJuan100% (5)
- ExamenDocumento2 páginasExamensolis maldonado AshleyAún no hay calificaciones
- Centro Sismológico Nacional CensisDocumento3 páginasCentro Sismológico Nacional CensisLucia Alexandra Rimac RamirezAún no hay calificaciones
- Especificaciones RompeDocumento21 páginasEspecificaciones RompeWilson Vasquez MariscalAún no hay calificaciones
- Plan de Estudios Laboratorio de Física Básica IDocumento3 páginasPlan de Estudios Laboratorio de Física Básica ILaura AAún no hay calificaciones
- Ni 52.10.01 ApoyosDocumento19 páginasNi 52.10.01 ApoyoslaliluleiloAún no hay calificaciones
- Análisis de Un Circuito FuncionalDocumento5 páginasAnálisis de Un Circuito FuncionalKevin DavidAún no hay calificaciones
- 5.examen 2 Procesos - Pablo LledoDocumento16 páginas5.examen 2 Procesos - Pablo LledoWilmerAún no hay calificaciones
- Miércoles, 16 de Junio de 2021, 14:01 Finalizado Miércoles, 16 de Junio de 2021, 14:26 24 Minutos 42 Segundos de 5,00 (%)Documento2 páginasMiércoles, 16 de Junio de 2021, 14:01 Finalizado Miércoles, 16 de Junio de 2021, 14:26 24 Minutos 42 Segundos de 5,00 (%)Juan Cruz FeresAún no hay calificaciones
- Lab 2 Qui-331 Propiedades Coligativas, Hecho Por Adrian MVR 100573987Documento9 páginasLab 2 Qui-331 Propiedades Coligativas, Hecho Por Adrian MVR 100573987Adrian Miguel Valerio RosarioAún no hay calificaciones
- Mec 3330 - Sem 2-2019-Res AuxDocumento4 páginasMec 3330 - Sem 2-2019-Res AuxRonald V. Nina VelizAún no hay calificaciones
- Programación lineal para maximizar beneficios en fabricación de productosDocumento2 páginasProgramación lineal para maximizar beneficios en fabricación de productosvaleria RamosAún no hay calificaciones
- Leccion 1.7 Esfuerzo CortanteDocumento28 páginasLeccion 1.7 Esfuerzo CortanteCristhiam Jose Flores Zavala100% (1)
- Determinacion de C - HDocumento3 páginasDeterminacion de C - HDiego Guaman100% (1)
- Carga FabrilDocumento9 páginasCarga Fabriljose100% (1)
- Motor de ArranqueDocumento29 páginasMotor de ArranquejuanitocarballoAún no hay calificaciones
- Encuesta AnalogíasDocumento6 páginasEncuesta AnalogíasEl DestapeAún no hay calificaciones
- 04 Introducción Al Cálculo Actuarial HUGO PALACIOSDocumento212 páginas04 Introducción Al Cálculo Actuarial HUGO PALACIOSYeremias Leso0% (1)
- STP TeoriaDocumento12 páginasSTP TeoriarodrigoAún no hay calificaciones
- Trabajo de Investigacion F.PDocumento12 páginasTrabajo de Investigacion F.PEros Matias DavilaAún no hay calificaciones
- MétodoLSidentificaDocumento4 páginasMétodoLSidentificaAlexandre Baeza MorenoAún no hay calificaciones
- Guia Tecnica Valery Julio 2001Documento11 páginasGuia Tecnica Valery Julio 2001Youkkat SamiAún no hay calificaciones
- Lab Circuitos CuboDocumento10 páginasLab Circuitos CuboSebastian Stayle Moreno SolanoAún no hay calificaciones
- Seminario - H. Matemática (Erick)Documento11 páginasSeminario - H. Matemática (Erick)Anghi YarangaAún no hay calificaciones
- TEMA 06 - Ejecución de Cálculos Matemáticos y Estadísticos Con Criterio LógicoDocumento54 páginasTEMA 06 - Ejecución de Cálculos Matemáticos y Estadísticos Con Criterio LógicoKeitsAún no hay calificaciones