También podría gustarte
- 2-Phase Stepper-Motor Driver Bipolar-IC TLE4729G: FeaturesDocumento29 páginas2-Phase Stepper-Motor Driver Bipolar-IC TLE4729G: FeaturesNgoc AnAún no hay calificaciones
- Tle 4726 IacDocumento23 páginasTle 4726 Iacfreddys merchanAún no hay calificaciones
- Data Sheet TLE4262G Regulador 5v 20 PinesDocumento16 páginasData Sheet TLE4262G Regulador 5v 20 Pinesaagreco73Aún no hay calificaciones
- TLE6225GPDocumento10 páginasTLE6225GPNoelAún no hay calificaciones
- Tle5203 Motor Driver PDFDocumento18 páginasTle5203 Motor Driver PDFJavier CuraAún no hay calificaciones
- 3-A DC Motor Driver TLE 5203: SPT IcDocumento18 páginas3-A DC Motor Driver TLE 5203: SPT IcJavier CuraAún no hay calificaciones
- TLE4470Documento24 páginasTLE4470ricahard61Aún no hay calificaciones
- Tca 785 DatasheetDocumento18 páginasTca 785 DatasheetCarlos SilvaAún no hay calificaciones
- CD00081251Documento15 páginasCD00081251Vladimir ParoleAún no hay calificaciones
- Contek - TA31002Documento5 páginasContek - TA31002Wah yonoAún no hay calificaciones
- l438 Dual RegulatorDocumento13 páginasl438 Dual Regulatorjulio797Aún no hay calificaciones
- TCA 785 Phase Control IC for Thyristors, Triacs & TransistorsDocumento16 páginasTCA 785 Phase Control IC for Thyristors, Triacs & TransistorsronaldotecnicoAún no hay calificaciones
- 2A Switching Regulator: 1 FeaturesDocumento22 páginas2A Switching Regulator: 1 FeaturesManuelAlejandroVicuñaRojasAún no hay calificaciones
- 7 A H-Bridge For DC-Motor Applications TLE 7209-2R: Final DatasheetDocumento32 páginas7 A H-Bridge For DC-Motor Applications TLE 7209-2R: Final DatasheetMecaSoftwareAún no hay calificaciones
- LM358ADDocumento21 páginasLM358ADزهير القدارAún no hay calificaciones
- Dual Power Operational Amplifier: Features DescriptionDocumento10 páginasDual Power Operational Amplifier: Features DescriptionlyndondrAún no hay calificaciones
- GMT Global Mixed Mode Tech G2898KD1U - C356810Documento8 páginasGMT Global Mixed Mode Tech G2898KD1U - C356810ziya tutuAún no hay calificaciones
- 3.3V Octal Buffer/line Driver With 30 Series Termination Resistors (3-State)Documento11 páginas3.3V Octal Buffer/line Driver With 30 Series Termination Resistors (3-State)Dwp BhaskaranAún no hay calificaciones
- Unisonic Technologies Co., LTD: Low Voltage Audio Power AmplifierDocumento5 páginasUnisonic Technologies Co., LTD: Low Voltage Audio Power Amplifieressen999Aún no hay calificaciones
- Description Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeDocumento8 páginasDescription Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeLuisAún no hay calificaciones
- Low Noise J-FET Dual Op Amps TL072Documento9 páginasLow Noise J-FET Dual Op Amps TL072Jose M PeresAún no hay calificaciones
- 800ma Low Dropout Positive Adjustable Regulator: Features DescriptionDocumento8 páginas800ma Low Dropout Positive Adjustable Regulator: Features DescriptionthomasAún no hay calificaciones
- Aic1084-33ce Regulador 3.3Documento7 páginasAic1084-33ce Regulador 3.3VictorManuelBernalBlancoAún no hay calificaciones
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ADocumento17 páginasControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ASledge HammerAún no hay calificaciones
- TLE6225GDocumento9 páginasTLE6225GNoelAún no hay calificaciones
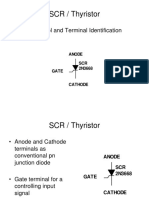
- SCR / Thyristor: - Circuit Symbol and Terminal IdentificationDocumento13 páginasSCR / Thyristor: - Circuit Symbol and Terminal IdentificationEzequiel Posadas BocacaoAún no hay calificaciones
- MB39A119Documento53 páginasMB39A119LưuVănViếtAún no hay calificaciones
- Power Driver IC for CD PlayersDocumento8 páginasPower Driver IC for CD PlayersAdnanDeğerliyurtAún no hay calificaciones
- Wide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351Documento10 páginasWide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351romanbun1Aún no hay calificaciones
- Service Manual For The 55LTV (LED)Documento26 páginasService Manual For The 55LTV (LED)palsanych1Aún no hay calificaciones
- SCR / Thyristor: - Circuit Symbol and Terminal IdentificationDocumento14 páginasSCR / Thyristor: - Circuit Symbol and Terminal IdentificationNaveedAún no hay calificaciones
- Wide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351Documento9 páginasWide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351Charbel TadrosAún no hay calificaciones
- Unisonic Technologies Co., LTD: 4 X 41W Quad Bridge Car Radio AmplifierDocumento5 páginasUnisonic Technologies Co., LTD: 4 X 41W Quad Bridge Car Radio AmplifierMartin MartinAún no hay calificaciones
- LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXDocumento8 páginasLC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXAndrés FerreyraAún no hay calificaciones
- LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXDocumento8 páginasLC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXArturo ArmuellesAún no hay calificaciones
- E101RGD1280LBAM350-CDocumento18 páginasE101RGD1280LBAM350-CKeys SyekAún no hay calificaciones
- Infineon Tle7230r Ds v03 04 enDocumento15 páginasInfineon Tle7230r Ds v03 04 enياسين الطنفوريAún no hay calificaciones
- Icn2038s ChiponeDocumento18 páginasIcn2038s ChiponeRoberto PasicAún no hay calificaciones
- 5 V/10 V Low Drop Voltage Regulator TLE 4266: FeaturesDocumento14 páginas5 V/10 V Low Drop Voltage Regulator TLE 4266: FeaturesLuis Mariano TovillasAún no hay calificaciones
- Low Drop Voltage Tracker TLE 4250 G: FeaturesDocumento11 páginasLow Drop Voltage Tracker TLE 4250 G: FeaturesJoey Mar AntonioAún no hay calificaciones
- PV PanelDocumento17 páginasPV PanelMuhammad RiazAún no hay calificaciones
- Finisar ftlc9152rgpl 100g 100m qsfp28 swdm4 Optical Transceiver Productspecrevb5Documento7 páginasFinisar ftlc9152rgpl 100g 100m qsfp28 swdm4 Optical Transceiver Productspecrevb5ashishAún no hay calificaciones
- Monolithic IC MM1089: Sensor AmplifierDocumento9 páginasMonolithic IC MM1089: Sensor AmplifierBenny AlconnAún no hay calificaciones
- MB3878Documento24 páginasMB3878LưuVănViếtAún no hay calificaciones
- L 292Documento12 páginasL 292costelchelariuAún no hay calificaciones
- 2SD300C17A4CDocumento7 páginas2SD300C17A4Csajad hejaziAún no hay calificaciones
- AP358 DatasheetDocumento13 páginasAP358 DatasheetRafael OliveiraAún no hay calificaciones
- Shenzhen Sunmoon Micro SM2255E - C881537Documento12 páginasShenzhen Sunmoon Micro SM2255E - C881537Technical sidhuAún no hay calificaciones
- Dmos Dual Full Bridge Driver: Multipower BCD TechnologyDocumento11 páginasDmos Dual Full Bridge Driver: Multipower BCD TechnologyChristian BiancoAún no hay calificaciones
- TLE4266G SiemensSemiconductorGroupDocumento9 páginasTLE4266G SiemensSemiconductorGroupDuranRod2013Aún no hay calificaciones
- SCR / Thyristor: - Circuit Symbol and Terminal IdentificationDocumento13 páginasSCR / Thyristor: - Circuit Symbol and Terminal IdentificationlubnaAún no hay calificaciones
- HA17524Documento18 páginasHA175248403c36589584aAún no hay calificaciones
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Aún no hay calificaciones
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDe EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsAún no hay calificaciones
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesDe EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1De EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Calificación: 4.5 de 5 estrellas4.5/5 (3)
- Ieai Lab FileDocumento26 páginasIeai Lab Fileyuva5sharmaAún no hay calificaciones
- LVDS and Scaler Testing Guide for LCD PanelsDocumento1 páginaLVDS and Scaler Testing Guide for LCD PanelsMarvin ConstantinoAún no hay calificaciones
- Electrical & Thermal Properties of MaterialsDocumento28 páginasElectrical & Thermal Properties of MaterialsJeromeDelCastilloAún no hay calificaciones
- Sem Hand Book PDFDocumento118 páginasSem Hand Book PDFAnonymous wl7fgzivPAún no hay calificaciones
- Jedec Standard: Terms, Definitions, and Letter Symbols For Microelectronic DevicesDocumento119 páginasJedec Standard: Terms, Definitions, and Letter Symbols For Microelectronic Devicestruva_kissAún no hay calificaciones
- Micro Electronic PillDocumento2 páginasMicro Electronic PillDevendra Singh RajpurohitAún no hay calificaciones
- ASCO Valve 8003 8202gh Solenoid ImDocumento6 páginasASCO Valve 8003 8202gh Solenoid ImLeonardAún no hay calificaciones
- Installation InstructionsDocumento2 páginasInstallation InstructionsFreddy MartinezAún no hay calificaciones
- Infant Warmer FISHER & PAYKEL IW 900 - Technical ManualDocumento180 páginasInfant Warmer FISHER & PAYKEL IW 900 - Technical ManualDodik E. Prasetyo0% (1)
- Configure sensor formats using remote inputsDocumento2 páginasConfigure sensor formats using remote inputsLuis Arturo RicoAún no hay calificaciones
- Modified Sine Wave InverterDocumento20 páginasModified Sine Wave Inverteronlyvinod56Aún no hay calificaciones
- Lecture 8 - Transverse Electromagnetic WavesDocumento10 páginasLecture 8 - Transverse Electromagnetic Wavessamer saeedAún no hay calificaciones
- CCM M6 Con VF 80444-233-01 PDFDocumento80 páginasCCM M6 Con VF 80444-233-01 PDFRobertoHerediaJacoboAún no hay calificaciones
- Klv-17hr1 LCD Colour TVDocumento74 páginasKlv-17hr1 LCD Colour TVMICHAEL THOULASSAún no hay calificaciones
- Chapter 5Documento61 páginasChapter 5Faiz MohdAún no hay calificaciones
- Miniature MV Series SwitchDocumento6 páginasMiniature MV Series SwitchChrist Rodney MAKANAAún no hay calificaciones
- Zero Export Function of PV SystemDocumento1 páginaZero Export Function of PV SystemNishantha AriyadasaAún no hay calificaciones
- DC Bus Diagram for Dual Speed Starter InverterDocumento63 páginasDC Bus Diagram for Dual Speed Starter InverterВладимир МалининAún no hay calificaciones
- Spice DemoDocumento13 páginasSpice DemoChiquita WhiteAún no hay calificaciones
- XP3 16 ManualDocumento50 páginasXP3 16 Manualesakkiraj1590Aún no hay calificaciones
- PRC-005-2 Standard Application GuideDocumento34 páginasPRC-005-2 Standard Application Guidepatricio86100% (1)
- RCF MB15H401Documento2 páginasRCF MB15H401Domnu_BibiAún no hay calificaciones
- Kenmore Microwave Service ManualDocumento47 páginasKenmore Microwave Service ManualrogressemAún no hay calificaciones
- Medium Voltage SwitchgearDocumento22 páginasMedium Voltage SwitchgearPATEL AKASHAún no hay calificaciones
- 04-06 T1 VW Touareg HID Conversion DIYDocumento4 páginas04-06 T1 VW Touareg HID Conversion DIYMiriam Zahir100% (1)
- Presentation On Ion GunDocumento8 páginasPresentation On Ion GunKoliAún no hay calificaciones
- AHD 414 Start-Stop-Diesel Control UnitDocumento9 páginasAHD 414 Start-Stop-Diesel Control UnitAL KUSCUAún no hay calificaciones
- EEE 101 - Lect23Documento12 páginasEEE 101 - Lect23Basim AlthafAún no hay calificaciones
- 18 Basic Components of DWDM PDFDocumento13 páginas18 Basic Components of DWDM PDFismuwahyudiAún no hay calificaciones
- Solved Problems in Electric MotorsDocumento6 páginasSolved Problems in Electric Motorssumithra93% (15)