También podría gustarte
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Knowledge MapsDocumento1 páginaKnowledge MapshotviruAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Access ControlDocumento3 páginasAccess ControlhotviruAún no hay calificaciones
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Interview & Types of Interviews: Created By: Prashant M. Hajare Roll No: 12Documento8 páginasInterview & Types of Interviews: Created By: Prashant M. Hajare Roll No: 12hotviruAún no hay calificaciones
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- RobsurgDocumento34 páginasRobsurghotviruAún no hay calificaciones
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Grammar & Spelling Check: CCNA 1 (v5.1 + v6.0) Chapter 1 Exam Answers 2017 - 100% FullDocumento9 páginasGrammar & Spelling Check: CCNA 1 (v5.1 + v6.0) Chapter 1 Exam Answers 2017 - 100% FullewmbtrakAún no hay calificaciones
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- SG15 20KTL M SG10KTL MT User Manual PDFDocumento78 páginasSG15 20KTL M SG10KTL MT User Manual PDFDuy Đào VănAún no hay calificaciones
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Fdp-Aiml 2019 PDFDocumento20 páginasFdp-Aiml 2019 PDFkrishna_marlaAún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Internet of ThingsDocumento29 páginasInternet of ThingsRochelle SiolaoAún no hay calificaciones
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- Current Sensor - LTSR 15-NPDocumento3 páginasCurrent Sensor - LTSR 15-NPFadhil Tresna NugrahaAún no hay calificaciones
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Mehmet Ali Bulut - ELFABEDocumento370 páginasMehmet Ali Bulut - ELFABEproton neuton100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
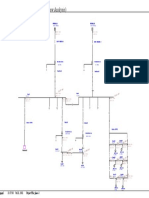
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocumento1 páginaOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderAún no hay calificaciones
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- ReadmeDocumento60 páginasReadmetimur_okAún no hay calificaciones
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- CAA66 ManualDocumento52 páginasCAA66 Manualferna2420Aún no hay calificaciones
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- 01 - How To Image A Windows System Using A Bootable WinPE UFD and ImageX - RDocumento6 páginas01 - How To Image A Windows System Using A Bootable WinPE UFD and ImageX - RJusto FigueroaAún no hay calificaciones
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- STORZ ENDOSKOPE Flexible Intubation Video Endoscope 11302BDX Instruction ManualDocumento64 páginasSTORZ ENDOSKOPE Flexible Intubation Video Endoscope 11302BDX Instruction Manualmetech8xAún no hay calificaciones
- Analysis of Algorithms: CS 302 - Data Structures Section 2.6Documento48 páginasAnalysis of Algorithms: CS 302 - Data Structures Section 2.6Munawar AhmedAún no hay calificaciones
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- TGA 33.360 6x4 BBDocumento4 páginasTGA 33.360 6x4 BBOlfa Soudani100% (1)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Innovative Kick Detection System For HP/HT Ultradeepwater Wells Using A Section of The BHADocumento6 páginasInnovative Kick Detection System For HP/HT Ultradeepwater Wells Using A Section of The BHAParth TrivediAún no hay calificaciones
- Form 15: Name of Member 1Documento2 páginasForm 15: Name of Member 1FSADFAún no hay calificaciones
- Accounting Information Systems 7th Edition Hall Test BankDocumento14 páginasAccounting Information Systems 7th Edition Hall Test Bankmisstepmonocarp1b69100% (27)
- Digital IntermediateDocumento2 páginasDigital Intermediateanon_755138626Aún no hay calificaciones
- CAPM Exam Prep WorkbookDocumento50 páginasCAPM Exam Prep WorkbookMohammad Jaradeh100% (5)
- Network Security v1.0 - Module 20Documento29 páginasNetwork Security v1.0 - Module 20Hussein KipkoechAún no hay calificaciones
- Intelligent Addressable Fire Alarm System: GeneralDocumento10 páginasIntelligent Addressable Fire Alarm System: Generaleduardo gonzalezavAún no hay calificaciones
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Core Java Material 2Documento199 páginasCore Java Material 2raamsgoluguriAún no hay calificaciones
- Predicting The Stock Market Using Machine Learning and Deep Learning PDFDocumento58 páginasPredicting The Stock Market Using Machine Learning and Deep Learning PDFPrakash PokhrelAún no hay calificaciones
- SNIPED Sessions and ORADocumento8 páginasSNIPED Sessions and ORARajab TambweAún no hay calificaciones
- Manual - Outland TechnologyDocumento34 páginasManual - Outland TechnologyibrahimAún no hay calificaciones
- Final NiDocumento17 páginasFinal NiAllysa D.R RemosAún no hay calificaciones
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- Niranjan Regional Telecom Training Center MysoreDocumento71 páginasNiranjan Regional Telecom Training Center Mysorenobita3Aún no hay calificaciones
- 03.10.12. Final Syllabus (M.SC Math)Documento24 páginas03.10.12. Final Syllabus (M.SC Math)Devil tigerAún no hay calificaciones
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Documento3 páginasModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002Aún no hay calificaciones
- Nursing InformaticsDocumento43 páginasNursing Informaticstummalapalli venkateswara rao67% (3)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Beluru Sudarshana Profile in BriefDocumento1 páginaBeluru Sudarshana Profile in BriefbeluruAún no hay calificaciones
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)