
También podría gustarte
- Tema 32 La CartaDocumento4 páginasTema 32 La Cartajuan perAún no hay calificaciones
- La Guerra Del Pacifico ActividadesDocumento3 páginasLa Guerra Del Pacifico Actividadesjuan per100% (3)
- El TinkuDocumento2 páginasEl Tinkujuan per100% (1)
- Sistema MonetarioDocumento3 páginasSistema Monetariojuan per100% (1)
- El RelojDocumento4 páginasEl Relojjuan perAún no hay calificaciones
- Informe Tema #2 Electrotecnia Lab.Documento5 páginasInforme Tema #2 Electrotecnia Lab.juan per100% (1)
- Tema N 14 La HistorietaDocumento3 páginasTema N 14 La Historietajuan per67% (3)
- Tema 10 Diseño de Vigas Temas DiversosDocumento43 páginasTema 10 Diseño de Vigas Temas Diversosjuan perAún no hay calificaciones
- Tema N 13 Diminutivos y AumentativosDocumento3 páginasTema N 13 Diminutivos y Aumentativosjuan perAún no hay calificaciones
- TEMA 8 Introducción Al Estudio de VigasDocumento84 páginasTEMA 8 Introducción Al Estudio de Vigasjuan per100% (1)
- Algebra Lineal Espacio Generado DefinicionDocumento13 páginasAlgebra Lineal Espacio Generado DefinicionAlexander VitalesAún no hay calificaciones
- Ejercicio 1 - Manejo de Documentación ASME VIIIDocumento3 páginasEjercicio 1 - Manejo de Documentación ASME VIIIStefanoAún no hay calificaciones
- Tema 1 CTM IessierrasurDocumento4 páginasTema 1 CTM IessierrasurPelusa97Aún no hay calificaciones
- Haz ElectronDocumento190 páginasHaz ElectronxagitxuAún no hay calificaciones
- Clases: Ecuaciones de Estado. Termodinámica Del EquilibrioDocumento15 páginasClases: Ecuaciones de Estado. Termodinámica Del EquilibrioClarimar Alejandra Camacho MoraAún no hay calificaciones
- Tipos de Reacciones Químicas - La Guía de Química PDFDocumento6 páginasTipos de Reacciones Químicas - La Guía de Química PDFJORGE PACHECOAún no hay calificaciones
- Parcial 2 Calculo Integral VectorialDocumento26 páginasParcial 2 Calculo Integral VectorialJairoAún no hay calificaciones
- PTC-111-02 Protocolo Calificación RPM EQUIPOSDocumento6 páginasPTC-111-02 Protocolo Calificación RPM EQUIPOSStiv LhAún no hay calificaciones
- Desactivar Proteccioñ BalastraDocumento13 páginasDesactivar Proteccioñ BalastraJose Fco. Aleman Arriaga75% (4)
- Geometria Segementos y AngulosDocumento6 páginasGeometria Segementos y AngulosGERSSON DANIEL SANCHEZ MEJIAAún no hay calificaciones
- Anual San Marcos - Aritmética Semana 08Documento11 páginasAnual San Marcos - Aritmética Semana 08Oscar CAAún no hay calificaciones
- Cantidad de Movimiento Lineal y Colisiones Parte 1Documento34 páginasCantidad de Movimiento Lineal y Colisiones Parte 1Emily AldanaAún no hay calificaciones
- Anexo Funciones HiperbólicasDocumento19 páginasAnexo Funciones HiperbólicasPablo siempretipaAún no hay calificaciones
- 6 Práctica LisozimaDocumento5 páginas6 Práctica LisozimalinaAún no hay calificaciones
- Titeres y Obras para NiñosDocumento35 páginasTiteres y Obras para Niñosperezk7Aún no hay calificaciones
- Comentarios Ejercicio Pag79Documento6 páginasComentarios Ejercicio Pag79aazkueAún no hay calificaciones
- Una Educación Sonora M - SHAFFERDocumento148 páginasUna Educación Sonora M - SHAFFERhiramesco100% (1)
- Cuento Sara, La SombraDocumento3 páginasCuento Sara, La SombraEldaa Elias GalleTaaAún no hay calificaciones
- Calculo de CilindrosDocumento11 páginasCalculo de CilindrosMartin Rios100% (1)
- Cinemática y Mru 4Documento7 páginasCinemática y Mru 4Allison Zarely BarriosAún no hay calificaciones
- El Sentido de La Corriente en El Inducido Es Tal Que Se Opone A La Variación de Flujo InductorDocumento3 páginasEl Sentido de La Corriente en El Inducido Es Tal Que Se Opone A La Variación de Flujo InductorAndrea MejiaAún no hay calificaciones
- Efectos de Flexion Torcion y Corte en Sap2000Documento12 páginasEfectos de Flexion Torcion y Corte en Sap2000Eddiam MendozaAún no hay calificaciones
- Ecuaciones DiferencialesDocumento50 páginasEcuaciones DiferencialesBeto Palma100% (1)
- Laboratorio 4Documento15 páginasLaboratorio 4Jhorlin Padilla Samamé0% (1)
- ArchivoDocumento8 páginasArchivoRicardo MateoAún no hay calificaciones
- Conservación de La EnergíaDocumento6 páginasConservación de La EnergíaJonathan MuesesAún no hay calificaciones
- LAbierta362012 ESPECIFICACIONES TECNICAS HOSP LA UNION FASE II-sig PDFDocumento351 páginasLAbierta362012 ESPECIFICACIONES TECNICAS HOSP LA UNION FASE II-sig PDFJeidys DZ100% (1)
- ReynoldsDocumento7 páginasReynoldsGerman Lima CruzAún no hay calificaciones
- Contador de EventosDocumento4 páginasContador de Eventosheider.jair0% (4)
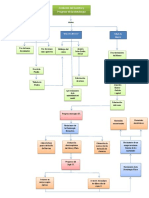
- Mapa Conceptual Evolución Del Hombre y Progreso de La MetalurgiaDocumento1 páginaMapa Conceptual Evolución Del Hombre y Progreso de La MetalurgiaKaren SierraAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaDe EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaCalificación: 4 de 5 estrellas4/5 (32)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)

























































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-1-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)
