También podría gustarte
- Taller Sensores y TransductoresDocumento3 páginasTaller Sensores y Transductoresstudios art leeAún no hay calificaciones
- Termistor NTCDocumento15 páginasTermistor NTCcasco123Aún no hay calificaciones
- Laboratorio 03 RectifierDocumento5 páginasLaboratorio 03 RectifierJordan Millan BermejoAún no hay calificaciones
- TermistorDocumento5 páginasTermistorJhonnnnnnAún no hay calificaciones
- Informe1 Disparo de Un TiristorDocumento16 páginasInforme1 Disparo de Un TiristorBryan CelisAún no hay calificaciones
- Informe 1 Electrotecnia PDFDocumento13 páginasInforme 1 Electrotecnia PDFchristianAún no hay calificaciones
- Sensores ResistivosDocumento7 páginasSensores ResistivosjuanpazufraAún no hay calificaciones
- Unidad 2º 1 Parte - Sensores Continuos de TemperaturaDocumento10 páginasUnidad 2º 1 Parte - Sensores Continuos de Temperaturaramiro11062011Aún no hay calificaciones
- RTD-Medida-3-hilosDocumento12 páginasRTD-Medida-3-hilosgasparresAún no hay calificaciones
- Acondicionamiento y Monitoreo de Sensor ResistivoDocumento28 páginasAcondicionamiento y Monitoreo de Sensor ResistivoJuanje TL100% (1)
- PRACTICA 2 Sensores RTDDocumento21 páginasPRACTICA 2 Sensores RTDRONALDAún no hay calificaciones
- Informe 4 - Sensores - Beltan - Landazuri - SigchaDocumento17 páginasInforme 4 - Sensores - Beltan - Landazuri - SigchaJENNIFER ALEJANDRA BELTRAN GAVILANESAún no hay calificaciones
- Practica Numero 3Documento10 páginasPractica Numero 3martinAún no hay calificaciones
- Termistores y LdrsDocumento19 páginasTermistores y LdrsLuis Eduardo Huerta MéndezAún no hay calificaciones
- Qué Es Un Divisor de TensiónDocumento22 páginasQué Es Un Divisor de TensiónbalderasiAún no hay calificaciones
- Termistores y FotorresistoresDocumento7 páginasTermistores y FotorresistoresRENZO ZAPATA SANCHEZAún no hay calificaciones
- Sensores y acondicionamiento de señalesDocumento79 páginasSensores y acondicionamiento de señalesEdicson Jose Niño DiazAún no hay calificaciones
- Termistor NTCDocumento23 páginasTermistor NTCdarkjak100% (1)
- RTD Galgas TermistoresDocumento42 páginasRTD Galgas TermistoresJose PinedaAún no hay calificaciones
- Reporte Especial 1Documento13 páginasReporte Especial 1carmenyarielaAún no hay calificaciones
- Cómo usar un termistor NTCDocumento16 páginasCómo usar un termistor NTCHugo CarhuallanquiAún no hay calificaciones
- Puente Wheatstone y Sensores Resistivos PDFDocumento5 páginasPuente Wheatstone y Sensores Resistivos PDFLuis Sahua VillegasAún no hay calificaciones
- Resistencia Variable Experiencia5Documento3 páginasResistencia Variable Experiencia5Adrianzhiito Cabañas LeonAún no hay calificaciones
- Cómo Usar Un Termistor NTCDocumento8 páginasCómo Usar Un Termistor NTCHugo Eduardo TorresAún no hay calificaciones
- Sensor de Temperatura NTCDocumento6 páginasSensor de Temperatura NTCAnonymous e3MJTJaAún no hay calificaciones
- Puente Wheatstone sensores resistivosDocumento7 páginasPuente Wheatstone sensores resistivosRODRIGO ALONZO VELASQUEZ FLORESAún no hay calificaciones
- Caracterización y linealización de termistor NTC para medición de temperaturaDocumento9 páginasCaracterización y linealización de termistor NTC para medición de temperaturajorgesantmont100% (1)
- Como Usar Termistor NTCDocumento9 páginasComo Usar Termistor NTCJohny AllAún no hay calificaciones
- Ejercicios Tema 2Documento5 páginasEjercicios Tema 2Asociación San Gabriel100% (1)
- Preparatorio4 4675 VILLACIS STEVEN CHICAIZA SANTIAGODocumento13 páginasPreparatorio4 4675 VILLACIS STEVEN CHICAIZA SANTIAGOSantiago ErickAún no hay calificaciones
- Circuitos analógicos con sensores semiconductoresDocumento6 páginasCircuitos analógicos con sensores semiconductoresWalterTafurAún no hay calificaciones
- Resistores EspecialesDocumento21 páginasResistores EspecialesVICTOR MARCOS0% (1)
- Sensores de Temperatura de Resistencia MetalicaDocumento21 páginasSensores de Temperatura de Resistencia MetalicaErick CordovaAún no hay calificaciones
- Cruzado Electricos 2 - TFN4Documento8 páginasCruzado Electricos 2 - TFN4RENZO PLASENCIA CELESTINOAún no hay calificaciones
- E Práctica#2Documento10 páginasE Práctica#2Sofia Coppiano GarciaAún no hay calificaciones
- 4-Oscilaciones Electricas Amortiguadas-FfDocumento5 páginas4-Oscilaciones Electricas Amortiguadas-FfValentina MuñozAún no hay calificaciones
- Preparatorio 2.1 - Villacis - StevenDocumento13 páginasPreparatorio 2.1 - Villacis - StevenSantiago ErickAún no hay calificaciones
- Informe #05 - Resistencias VariablesDocumento10 páginasInforme #05 - Resistencias VariablesVladimir Q. MéndezAún no hay calificaciones
- Resistencias Dependientes YiDocumento3 páginasResistencias Dependientes YiJohan RojasAún no hay calificaciones
- Oscilaciones Eléctricas AmortiguadasDocumento5 páginasOscilaciones Eléctricas AmortiguadasalejandroAún no hay calificaciones
- Unidad II Entrada y Salida AnalógicaDocumento10 páginasUnidad II Entrada y Salida AnalógicaEugenio PelaezAún no hay calificaciones
- Resumen - 1er Parcial Electronica IIDocumento7 páginasResumen - 1er Parcial Electronica IIMariana TuñonAún no hay calificaciones
- Informe Circuitos 3Documento6 páginasInforme Circuitos 3HIPOLITO ARTURO RIVEROS GUEVARAAún no hay calificaciones
- Control de Temperatura Con TermistorDocumento8 páginasControl de Temperatura Con TermistorMoises QuispeAún no hay calificaciones
- Circuitos ElectrónicosDocumento12 páginasCircuitos ElectrónicosSab TadeAún no hay calificaciones
- PRACTICA 2 Sensores RTD y Termistores GUEVARADocumento14 páginasPRACTICA 2 Sensores RTD y Termistores GUEVARAJeff GuevaraAún no hay calificaciones
- Sensores resistivos RTD y termistorDocumento6 páginasSensores resistivos RTD y termistorDAVID ISMAEL COLLAGUAZO AMORESAún no hay calificaciones
- Termistores y Detectores ResistivosDocumento7 páginasTermistores y Detectores ResistivosAngel NajarroAún no hay calificaciones
- DocxDocumento14 páginasDocxEduardo SandovalAún no hay calificaciones
- Practica12 Equipo2Documento35 páginasPractica12 Equipo2Alan Yair Ceballos CruzAún no hay calificaciones
- Lab 3 Circuitos Electricos 2Documento17 páginasLab 3 Circuitos Electricos 2Naraya QuispeAún no hay calificaciones
- Análisis experimental circuito RLCDocumento8 páginasAnálisis experimental circuito RLCMario SanchoAún no hay calificaciones
- Informe Pt100Documento6 páginasInforme Pt100Javier Camilo Aldana BarreraAún no hay calificaciones
- Informe de Laboratorio de Circuitos Electricos I - Numero 03Documento23 páginasInforme de Laboratorio de Circuitos Electricos I - Numero 03Giancarlo AstochadoAún no hay calificaciones
- Actividad Nº4Documento6 páginasActividad Nº4edurado moratoAún no hay calificaciones
- Termistores PDFDocumento8 páginasTermistores PDFRonald BravoAún no hay calificaciones
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDe EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaAún no hay calificaciones
- Montaje de elementos y equipos de instalaciones eléctricas de baja tensión en edificios. ELES0208De EverandMontaje de elementos y equipos de instalaciones eléctricas de baja tensión en edificios. ELES0208Aún no hay calificaciones
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- 2022 - 11 - Semana 46Documento1 página2022 - 11 - Semana 46Remigio Clemente Guevara BaculimaAún no hay calificaciones
- SeñalesDocumento1 páginaSeñalesRemigio Clemente Guevara BaculimaAún no hay calificaciones
- 2022 - 11 - Semana 46Documento1 página2022 - 11 - Semana 46Remigio Clemente Guevara BaculimaAún no hay calificaciones
- SeñalesDocumento1 páginaSeñalesRemigio Clemente Guevara BaculimaAún no hay calificaciones
- SeñalesDocumento1 páginaSeñalesRemigio Clemente Guevara BaculimaAún no hay calificaciones
- SeñalesDocumento1 páginaSeñalesRemigio Clemente Guevara BaculimaAún no hay calificaciones
- SeñalesDocumento1 páginaSeñalesRemigio Clemente Guevara BaculimaAún no hay calificaciones
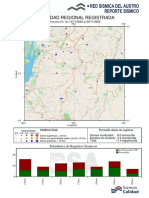
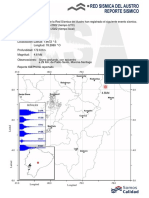
- Sismicidad Regional Registrada: Del 12 de Octubre de 2022Documento1 páginaSismicidad Regional Registrada: Del 12 de Octubre de 2022Remigio Clemente Guevara BaculimaAún no hay calificaciones
- Tutorial Gerber ToolDocumento8 páginasTutorial Gerber ToolRemigio Clemente Guevara BaculimaAún no hay calificaciones
- Microprocesadores 1 (2013-2014)Documento6 páginasMicroprocesadores 1 (2013-2014)Remigio Clemente Guevara BaculimaAún no hay calificaciones
- Extensometros GBDocumento4 páginasExtensometros GBRemigio Clemente Guevara BaculimaAún no hay calificaciones
- Fabricar o SubcontratarDocumento11 páginasFabricar o SubcontratarRemigio Clemente Guevara BaculimaAún no hay calificaciones
- DesgasteDocumento11 páginasDesgasteMiluska Villarreal HernandezAún no hay calificaciones
- SeñalesDocumento1 páginaSeñalesRemigio Clemente Guevara BaculimaAún no hay calificaciones
- 1) IntroducciónDocumento40 páginas1) IntroducciónRemigio Clemente Guevara BaculimaAún no hay calificaciones
- El Arte de La GuerraDocumento40 páginasEl Arte de La GuerraSegundo Gerardo Ulloa BocanegraAún no hay calificaciones
- Teoria de Control - Libro GuíaDocumento378 páginasTeoria de Control - Libro GuíaRemigio Clemente Guevara BaculimaAún no hay calificaciones
- Teoria de Control - Libro GuíaDocumento378 páginasTeoria de Control - Libro GuíaRemigio Clemente Guevara BaculimaAún no hay calificaciones
- SismoDocumento36 páginasSismoAlejandro Quezada SolísAún no hay calificaciones
- SismoDocumento6 páginasSismoAnthonny MeyerAún no hay calificaciones
- T10890CAP1Documento58 páginasT10890CAP1Remigio Clemente Guevara BaculimaAún no hay calificaciones
- Manual para Usar SImulador ProteusDocumento16 páginasManual para Usar SImulador Proteuslab_digitales100% (2)
- Gil Nobajas - INGENIERÍA DE CONTROLDocumento147 páginasGil Nobajas - INGENIERÍA DE CONTROLRemigio Clemente Guevara Baculima0% (1)
- SismoDocumento36 páginasSismoAlejandro Quezada SolísAún no hay calificaciones