También podría gustarte
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Mce 205aDocumento4 páginasMce 205asmrahimAún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- 2nd Assignment QuestionsDocumento2 páginas2nd Assignment QuestionssmrahimAún no hay calificaciones
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- HT TP: //qpa Pe R.W But .Ac .In: Satellite CommunicationDocumento11 páginasHT TP: //qpa Pe R.W But .Ac .In: Satellite CommunicationsmrahimAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- WR1500N - 2.0 User GuideDocumento73 páginasWR1500N - 2.0 User GuidesmrahimAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- MEG-1 2013 JuneDocumento4 páginasMEG-1 2013 JunesmrahimAún no hay calificaciones
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- A Large Part of HamletDocumento6 páginasA Large Part of HamletsmrahimAún no hay calificaciones
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
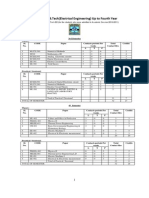
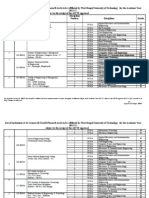
- EE Final Upto 4th Year Syllabus 10.01.14Documento67 páginasEE Final Upto 4th Year Syllabus 10.01.14smrahimAún no hay calificaciones
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- PGET 2013ExamDateNotificationDocumento2 páginasPGET 2013ExamDateNotificationsmrahimAún no hay calificaciones
- Unisonic Technologies Co., LTD: DescriptionDocumento3 páginasUnisonic Technologies Co., LTD: DescriptionsmrahimAún no hay calificaciones
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Ar Adl - : Answer: (C)Documento17 páginasAr Adl - : Answer: (C)smrahimAún no hay calificaciones
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- 0-Sea - Matrix-2012-13Documento21 páginas0-Sea - Matrix-2012-13smrahimAún no hay calificaciones
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Staff Selection CommissionDocumento2 páginasStaff Selection CommissionsmrahimAún no hay calificaciones
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- HFSS ManualDocumento1227 páginasHFSS ManualSonia Baci100% (1)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Timetable 3rd Sem 2012Documento1 páginaTimetable 3rd Sem 2012smrahimAún no hay calificaciones
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Notice 10001158Documento1 páginaNotice 10001158smrahimAún no hay calificaciones
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Visual LISP™ Function ChartDocumento1 páginaVisual LISP™ Function ChartCarlos ValleAún no hay calificaciones
- Paul F. Lazarsfeld: National Academy of SciencesDocumento34 páginasPaul F. Lazarsfeld: National Academy of SciencesSanja JankovićAún no hay calificaciones
- Theory of Architecture - IIDocumento59 páginasTheory of Architecture - IILokesh JangirAún no hay calificaciones
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- 5.3 Logical ReasoningDocumento4 páginas5.3 Logical ReasoningHamid IlyasAún no hay calificaciones
- Solution Thermo Part 1Documento9 páginasSolution Thermo Part 1Oh DausAún no hay calificaciones
- Geometrical Formulation of Quantum MechanicsDocumento41 páginasGeometrical Formulation of Quantum Mechanicskipikos45Aún no hay calificaciones
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- Bernice HuangDocumento25 páginasBernice HuangbhuuangAún no hay calificaciones
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Tesis Aan Putra, M.pd.Documento338 páginasTesis Aan Putra, M.pd.Rizki KurniashihAún no hay calificaciones
- MYJAVACAFE - Java Interview Questions (Delivered by Nageswara Rao From Inetsolv Institute of Hyderabad)Documento21 páginasMYJAVACAFE - Java Interview Questions (Delivered by Nageswara Rao From Inetsolv Institute of Hyderabad)haibye424Aún no hay calificaciones
- Problem Solving in Mathematics ModuleDocumento57 páginasProblem Solving in Mathematics ModuleShela RamosAún no hay calificaciones
- Python Machine Learning - Sample ChapterDocumento57 páginasPython Machine Learning - Sample ChapterPackt PublishingAún no hay calificaciones
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- Factors of ProductionDocumento5 páginasFactors of ProductionKanwal MansoorAún no hay calificaciones
- Henry System of Classification 14Documento1 páginaHenry System of Classification 14Ellen Jane GatdulaAún no hay calificaciones
- Research Aptitude TestDocumento14 páginasResearch Aptitude TestMaths CTAún no hay calificaciones
- 6th UnpackingDocumento33 páginas6th UnpackingJESUS ANTONIO RAMOS MORONAún no hay calificaciones
- CampusX DSMP SyllabusDocumento48 páginasCampusX DSMP Syllabussayantan palAún no hay calificaciones
- Cost Volume Profit AnalysisDocumento29 páginasCost Volume Profit AnalysischaluvadiinAún no hay calificaciones
- Bend Stretch Forming AluminumDocumento8 páginasBend Stretch Forming AluminumMomoAún no hay calificaciones
- Presentation Introduction To FEA Using ProMechanicaDocumento40 páginasPresentation Introduction To FEA Using ProMechanicasusanwebAún no hay calificaciones
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- NFMPchapt1 - Synopsis of Geometric Algebra PDFDocumento27 páginasNFMPchapt1 - Synopsis of Geometric Algebra PDFHenrique Mariano AmaralAún no hay calificaciones
- Cbse Practical/Project Schedule: Class-Xi/Xii Mode S.NO. TopicDocumento26 páginasCbse Practical/Project Schedule: Class-Xi/Xii Mode S.NO. TopicGrand PlayerAún no hay calificaciones
- g6 Sincerity-Fasting Month Schedule 2024Documento1 páginag6 Sincerity-Fasting Month Schedule 2024rayghana01Aún no hay calificaciones
- Extractor For Multi Value Class Characteristic Values Using Function ModuleDocumento13 páginasExtractor For Multi Value Class Characteristic Values Using Function ModuleEliseo Abad Camacho CAún no hay calificaciones
- Csec Mathematics January 2018 p2 PDFDocumento33 páginasCsec Mathematics January 2018 p2 PDFglennAún no hay calificaciones
- Basics of Electrical MeasurementDocumento98 páginasBasics of Electrical MeasurementAshesh B VigneshAún no hay calificaciones
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- First Semester 2019-20 Course HandoutDocumento14 páginasFirst Semester 2019-20 Course HandoutAnkit GoyalAún no hay calificaciones
- Punctuations: Symbols Uses ExamplesDocumento3 páginasPunctuations: Symbols Uses ExamplesMari Carmen Pérez GómezAún no hay calificaciones
- MandelbrotDocumento6 páginasMandelbrotChris SudjanaAún no hay calificaciones
- Excel Password RemoverDocumento3 páginasExcel Password RemoverParthibanAún no hay calificaciones
- Machinery of the Mind (An Interview)De EverandMachinery of the Mind (An Interview)Calificación: 4.5 de 5 estrellas4.5/5 (28)