También podría gustarte
- 4 - Rectificadores Controlados MonofasicosDocumento20 páginas4 - Rectificadores Controlados MonofasicosEdgard Larico Infa0% (1)
- Circuitos de Activación PWM con FETs y UC2525Documento6 páginasCircuitos de Activación PWM con FETs y UC2525Robert SalcedoAún no hay calificaciones
- Instalaciones Eléctricas 4Documento41 páginasInstalaciones Eléctricas 4Víctor Manuel Ríos Campos100% (1)
- Final de Carrera de Position 7551-7552Documento8 páginasFinal de Carrera de Position 7551-7552dieguitojo_24Aún no hay calificaciones
- 3 Interruptores - DesplazamientoDocumento76 páginas3 Interruptores - DesplazamientoRaul Artola100% (1)
- Tabla 1. Códigos de Falla y Mensajes en PantallaDocumento9 páginasTabla 1. Códigos de Falla y Mensajes en PantallaJavier SilvaAún no hay calificaciones
- Fallas eléctricas primarias subestacionesDocumento40 páginasFallas eléctricas primarias subestacionesMiguel RamirezAún no hay calificaciones
- Clase7 RelesDocumento51 páginasClase7 Relesgerman.toro3885Aún no hay calificaciones
- Interruptores - Medición de desplazamiento y parámetros claveDocumento72 páginasInterruptores - Medición de desplazamiento y parámetros clavegerman mosqueraAún no hay calificaciones
- Articulo Control Motor Pasoapaso Con Transistores TIPDocumento8 páginasArticulo Control Motor Pasoapaso Con Transistores TIPNicolas Daraviña HenaoAún no hay calificaciones
- Control de fase directo con ArduinoDocumento7 páginasControl de fase directo con ArduinoEfren QuilumbaAún no hay calificaciones
- CVT: transformadores de tensión capacitivosDocumento11 páginasCVT: transformadores de tensión capacitivosIsabellaAún no hay calificaciones
- Clase Virtual N - 7 PDFDocumento31 páginasClase Virtual N - 7 PDFangel chaconAún no hay calificaciones
- Relevador 51Documento15 páginasRelevador 51Richie QuinatoaAún no hay calificaciones
- Informre 5 Reles ElectromagneticosDocumento33 páginasInformre 5 Reles ElectromagneticosGutierreź JoaquìnAún no hay calificaciones
- Circuitos de Disparo EléctricosDocumento35 páginasCircuitos de Disparo EléctricosGerman RodriguezAún no hay calificaciones
- Presentacion - SControl Ingenieria SAC - TISUR SISTEMA CPSDocumento23 páginasPresentacion - SControl Ingenieria SAC - TISUR SISTEMA CPSWalter Alvaro CcasaAún no hay calificaciones
- Reporte OptotriacDocumento10 páginasReporte OptotriacEliott Efrain Morales HernandezAún no hay calificaciones
- Tecnologías lógica cableada automatizaciónDocumento12 páginasTecnologías lógica cableada automatizaciónJose Gregg Banquez0% (1)
- Ficha - Tecnica - Transformador - Convencional - MEGATRONDocumento2 páginasFicha - Tecnica - Transformador - Convencional - MEGATRONmauricio chaparroAún no hay calificaciones
- Transformador MagnetronDocumento2 páginasTransformador MagnetronNataly AvendañoAún no hay calificaciones
- Mecánica FADocumento30 páginasMecánica FAEdwinAún no hay calificaciones
- infoPLC - Net - Clase 1 - Introduccion - ArquitecturaDocumento24 páginasinfoPLC - Net - Clase 1 - Introduccion - Arquitecturachiquilinas grasiosasAún no hay calificaciones
- Diagnóstico de falla en fuente regulada simétricaDocumento11 páginasDiagnóstico de falla en fuente regulada simétricaRodrigo VillanuevaAún no hay calificaciones
- Conmutador 86tDocumento16 páginasConmutador 86tAlonso RomeroAún no hay calificaciones
- V. Dispositivos de PotenciaDocumento36 páginasV. Dispositivos de PotenciaAnaciel00Aún no hay calificaciones
- Interfaces de relé y relés de estado sólido para automatización industrialDocumento142 páginasInterfaces de relé y relés de estado sólido para automatización industrialefraraulmolinaAún no hay calificaciones
- Protección TransformadorDocumento54 páginasProtección Transformadorangel140811Aún no hay calificaciones
- Informe Nº6 - Sensor PIR y Contactores (FluidSIM)Documento8 páginasInforme Nº6 - Sensor PIR y Contactores (FluidSIM)Miguel ZP100% (1)
- Control de dos focos mediante salidas de relé en PLCDocumento4 páginasControl de dos focos mediante salidas de relé en PLCAndrea ChancusigAún no hay calificaciones
- Bomba A11VODocumento64 páginasBomba A11VOOrlando AriasAún no hay calificaciones
- Regulador de PotenciaDocumento21 páginasRegulador de Potenciajudi02Aún no hay calificaciones
- Taller Electromecanico 3Documento4 páginasTaller Electromecanico 3Sofia CardenasAún no hay calificaciones
- Hoja ComparativaDocumento4 páginasHoja ComparativaDaniel GarciaAún no hay calificaciones
- Cap 1 - Generalidades de Sistemas de DistribuciónDocumento42 páginasCap 1 - Generalidades de Sistemas de DistribuciónJosé Nikol Cruz PérezAún no hay calificaciones
- RelevadoresDocumento28 páginasRelevadoresManuel MillaresAún no hay calificaciones
- Seleccion de ActuadoresDocumento1 páginaSeleccion de ActuadoresMarco Valverde MorenoAún no hay calificaciones
- Circuitos de Maniobra, (Aplicaciones)Documento74 páginasCircuitos de Maniobra, (Aplicaciones)Georgius1982Aún no hay calificaciones
- LG DV450 DV452 Reproductor DVD Manual de ServicioDocumento56 páginasLG DV450 DV452 Reproductor DVD Manual de Servicioalberto castañoAún no hay calificaciones
- Proyecto de Conmutacion ACDocumento10 páginasProyecto de Conmutacion ACcervanteshernandezyankeiAún no hay calificaciones
- PracticaDocumento11 páginasPracticaEmmanuel PugaAún no hay calificaciones
- MQ 003 - DL 1013M3 (Spa) PDFDocumento12 páginasMQ 003 - DL 1013M3 (Spa) PDFAndres BeltranAún no hay calificaciones
- TP TC y Reconectador Univer 041108Documento31 páginasTP TC y Reconectador Univer 041108Cristian Rosales RomaoAún no hay calificaciones
- 1.1 Salinas Flores FranciscoDocumento9 páginas1.1 Salinas Flores FranciscoEdgar IsmaelAún no hay calificaciones
- fiveDocumento11 páginasfiveizackosocuAún no hay calificaciones
- Procedimiento de Operación SubestaciónDocumento18 páginasProcedimiento de Operación SubestaciónJavier Ramirez MedinaAún no hay calificaciones
- Teoría y Aplicaciones de Los Circuitos de Control de Los MC34063 yDocumento43 páginasTeoría y Aplicaciones de Los Circuitos de Control de Los MC34063 yFabio de FeoAún no hay calificaciones
- 2 Subestaciones IndustrialesDocumento86 páginas2 Subestaciones IndustrialesAndrade Gonzalez Mauricio100% (1)
- Allison Tranmissions PDFDocumento67 páginasAllison Tranmissions PDFInjeletro DieselAún no hay calificaciones
- 2014 SECCIONADORESv02Documento64 páginas2014 SECCIONADORESv02JUAN PABLOAún no hay calificaciones
- Semiconductores de PotenciaDocumento10 páginasSemiconductores de PotenciaAldair BallesterosAún no hay calificaciones
- Selectores de Circuitos L-847Documento37 páginasSelectores de Circuitos L-847Fabian FabAún no hay calificaciones
- Relé 51 y 59: Protecciones de sobrecorriente y sobretensiónDocumento5 páginasRelé 51 y 59: Protecciones de sobrecorriente y sobretensiónschwanz503Aún no hay calificaciones
- Analoga Puente HDocumento4 páginasAnaloga Puente Harturo moralesAún no hay calificaciones
- Acc14 PI Noreg PPT STDDocumento184 páginasAcc14 PI Noreg PPT STDCris MelladoAún no hay calificaciones
- CAC-050 - Conexion A Motor JiangsuDocumento2 páginasCAC-050 - Conexion A Motor Jiangsunestor martinezAún no hay calificaciones
- Implementación de arrancador Start-Stop PLCDocumento6 páginasImplementación de arrancador Start-Stop PLCElRaso-08Aún no hay calificaciones
- Comando y Protección de Motores PDFDocumento15 páginasComando y Protección de Motores PDFAriel FernandezAún no hay calificaciones
- 100 Circuitos de Potencia con SCRs y TriacsDe Everand100 Circuitos de Potencia con SCRs y TriacsCalificación: 3 de 5 estrellas3/5 (5)
- Antenas verticales para bajas frecuencias: (MF y HF)De EverandAntenas verticales para bajas frecuencias: (MF y HF)Aún no hay calificaciones
- Jorge Parte de EstadisticaDocumento6 páginasJorge Parte de EstadisticaJorge Luis Millones CastañedaAún no hay calificaciones
- Planificacion Marzo II°MedioDocumento6 páginasPlanificacion Marzo II°MedioERICK GONZALEZAún no hay calificaciones
- Anexo Guia 3Documento7 páginasAnexo Guia 3Valentina RomeroAún no hay calificaciones
- Iv Seminario de InvestigacionDocumento1 páginaIv Seminario de InvestigacionMelani Marca CopaliAún no hay calificaciones
- Trabajo Física III - 3Documento7 páginasTrabajo Física III - 3Romario Torcuato Guerra EspinozaAún no hay calificaciones
- Pierre de Fermat, el genio de la Teoría de NúmerosDocumento3 páginasPierre de Fermat, el genio de la Teoría de NúmerosYirtzhakShaikhAún no hay calificaciones
- Análisis de Los Tipos de InvestigaciónDocumento4 páginasAnálisis de Los Tipos de InvestigacióngloriaAún no hay calificaciones
- Solucion Ficha 10 - 5to - Eda5Documento4 páginasSolucion Ficha 10 - 5to - Eda5Eliseo PSAún no hay calificaciones
- Mecanica Solidos Rigidos 2018-20Documento4 páginasMecanica Solidos Rigidos 2018-20Cristian Camilo Hoyos ReyesAún no hay calificaciones
- Tarea 1 Metodos 2 2021-1Documento14 páginasTarea 1 Metodos 2 2021-1Diego HuamaniAún no hay calificaciones
- La Pedagogía WaldorfDocumento3 páginasLa Pedagogía WaldorfA Carolina ParraAún no hay calificaciones
- PREGUNTAS GENERADORAS UNIDAD 2. CompletoDocumento7 páginasPREGUNTAS GENERADORAS UNIDAD 2. CompletoFredy Panqueva Millan50% (2)
- Variación del radio atómico y otras propiedades en la tabla periódicaDocumento24 páginasVariación del radio atómico y otras propiedades en la tabla periódicaNielsBohr RamirezAún no hay calificaciones
- Fisiologia Del Sistema NeuromuscularDocumento29 páginasFisiologia Del Sistema NeuromuscularJuan ArcilaAún no hay calificaciones
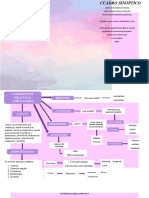
- Cuadro Sinoptico-Enfoques DidacticosDocumento3 páginasCuadro Sinoptico-Enfoques Didacticosleydi arevaloAún no hay calificaciones
- Compuertas y vertederos en estructuras hidráulicasDocumento51 páginasCompuertas y vertederos en estructuras hidráulicasLuis Amos Cano NoyaAún no hay calificaciones
- El método científico en el RenacimientoDocumento3 páginasEl método científico en el Renacimientoeric cristhianAún no hay calificaciones
- Seguridad y SaludDocumento44 páginasSeguridad y SaludFrancisco Paul Trejo MezaAún no hay calificaciones
- Programa de Izaje de CargasDocumento47 páginasPrograma de Izaje de CargasDuvys Dearmas TrianaAún no hay calificaciones
- Conociendo nuestras manifestaciones culturalesDocumento35 páginasConociendo nuestras manifestaciones culturalesEdward Tello DiazAún no hay calificaciones
- Inecuaciones para Quinto de SecundariaDocumento6 páginasInecuaciones para Quinto de SecundariaNazareth Narvasta AntonioAún no hay calificaciones
- PD N°5 Derivada Optimiz 2020 IiDocumento4 páginasPD N°5 Derivada Optimiz 2020 IiMaf OliAún no hay calificaciones
- Herramientas A Pedir AfueraDocumento1 páginaHerramientas A Pedir AfueraThrive MEDAún no hay calificaciones
- CMP04 C3Documento26 páginasCMP04 C3Federico Gabriel GutierrezAún no hay calificaciones
- Ht-G. Beslux Crown M Fluid FDocumento1 páginaHt-G. Beslux Crown M Fluid FRomeo WilliamsAún no hay calificaciones
- Tipos de mosaicos fotográficosDocumento4 páginasTipos de mosaicos fotográficosIsmael Gayosso0% (1)
- PLAN DE INTERVENCIÓN PARA NIÑOS DE PADRES SEPARADOSDocumento9 páginasPLAN DE INTERVENCIÓN PARA NIÑOS DE PADRES SEPARADOSKarina MirandaAún no hay calificaciones
- Los Fluidos Reales Se Caracterizan Por La Presencia de Una Fuerza de RozamientoDocumento2 páginasLos Fluidos Reales Se Caracterizan Por La Presencia de Una Fuerza de RozamientoNICOL YARITZA SANTAMARIA ROJASAún no hay calificaciones
- PTL-2101 Tratamiento Primario Del Petróleo y Gas NaturalDocumento8 páginasPTL-2101 Tratamiento Primario Del Petróleo y Gas NaturalArturo DominguezAún no hay calificaciones
- Lectura - Taller de Diagnóstico Clínico FuncionalDocumento3 páginasLectura - Taller de Diagnóstico Clínico FuncionalMARIANA CASTRO MONROEAún no hay calificaciones