También podría gustarte
- Teoria 1Documento38 páginasTeoria 1martin danielAún no hay calificaciones
- Calculo VectorialDocumento8 páginasCalculo VectorialRodrigo chambi RosalesAún no hay calificaciones
- TEEM Electrostática EjerciciosDocumento564 páginasTEEM Electrostática EjerciciosRenato GutierrezAún no hay calificaciones
- AN VEC Teorema de Helmholtz (USevilla)Documento32 páginasAN VEC Teorema de Helmholtz (USevilla)elduqueeconomicoAún no hay calificaciones
- Mecanica de FluidosDocumento51 páginasMecanica de Fluidosjulitofic75% (8)
- Diferencias Finitas y Volúmenes Finitos para TermofluidosDocumento22 páginasDiferencias Finitas y Volúmenes Finitos para TermofluidosTraversAún no hay calificaciones
- Teoremas Fundamentales Del Cálculo VectorialDocumento3 páginasTeoremas Fundamentales Del Cálculo VectorialBrandon Styven RoseroAún no hay calificaciones
- Teoría Elemental de CamposDocumento6 páginasTeoría Elemental de CamposCharl013Aún no hay calificaciones
- Eléctricidad y Magnetismo: Pauta de la Interrogación 2Documento7 páginasEléctricidad y Magnetismo: Pauta de la Interrogación 2Cynthia CelisAún no hay calificaciones
- Applications in Real Life of The Theorems of IntegrationDocumento12 páginasApplications in Real Life of The Theorems of IntegrationCindy Crepas EspadasAún no hay calificaciones
- Mecánica de Fluidos IDocumento17 páginasMecánica de Fluidos Ialexomar27Aún no hay calificaciones
- Electromagnetismo-Electricidad - Cap. 3 (Ley de Gauss) - 2 - Con TDocumento19 páginasElectromagnetismo-Electricidad - Cap. 3 (Ley de Gauss) - 2 - Con TLucero AlarcónAún no hay calificaciones
- Introduccion A La ConveccionDocumento37 páginasIntroduccion A La ConveccionRonny TituanaAún no hay calificaciones
- Aplicaciones de Las Derivadas ParcialesDocumento11 páginasAplicaciones de Las Derivadas ParcialesEdith Samandra Santillan FloresAún no hay calificaciones
- Ecuación de ContinuidadDocumento6 páginasEcuación de ContinuidadDiego Vargas GonzalesAún no hay calificaciones
- NABLADocumento29 páginasNABLAalannah brizuelaAún no hay calificaciones
- Cap Itulo 14 Ecuaciones de MaxwellDocumento13 páginasCap Itulo 14 Ecuaciones de MaxwellAndres alberto MartinezAún no hay calificaciones
- Integrales de LineaDocumento18 páginasIntegrales de LineaYuri Pe�a OrosAún no hay calificaciones
- FVM Cap 1Documento31 páginasFVM Cap 1Cristian MendozaAún no hay calificaciones
- Analisis VectorialDocumento10 páginasAnalisis VectorialDaniel NavasAún no hay calificaciones
- Taller Fluidos Viscosos 2018-IDocumento6 páginasTaller Fluidos Viscosos 2018-IJeimy Alejandra Alarcon CarvajalAún no hay calificaciones
- Ley de GaussDocumento33 páginasLey de GaussAngie EspinosaAún no hay calificaciones
- Introducción a la aerodinámica mediante métodos de variable complejaDocumento11 páginasIntroducción a la aerodinámica mediante métodos de variable complejajorgearce321Aún no hay calificaciones
- Ondas Superficiales en Un LiquidoDocumento4 páginasOndas Superficiales en Un LiquidoÁngel ReaAún no hay calificaciones
- 3.1 Potencial Escalar El EctricoDocumento14 páginas3.1 Potencial Escalar El EctricoIosu ArizAún no hay calificaciones
- Flujo Irrotacional - BorradorDocumento11 páginasFlujo Irrotacional - BorradorAinara Cecilia SalaverriaAún no hay calificaciones
- Pappus Guldin, RiccatiDocumento9 páginasPappus Guldin, RiccatiDiego CastilloAún no hay calificaciones
- La Radiación Como Un Fenómeno Electromagnético - MEC501 - Manejo y ConversiónDocumento11 páginasLa Radiación Como Un Fenómeno Electromagnético - MEC501 - Manejo y Conversiónignacia francisca troncoso díazAún no hay calificaciones
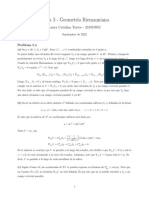
- Tarea 3Documento3 páginasTarea 3Catalina TorresAún no hay calificaciones
- 21,22Documento2 páginas21,22Arantxa Lizbeth Gómez MoralesAún no hay calificaciones
- Vector Nabla, Gradiante, y Operaciones ElementalesDocumento3 páginasVector Nabla, Gradiante, y Operaciones ElementalesArturo Daniel CordovaAún no hay calificaciones
- Ecuacion de Shodinguer El Representacion de Los MomentosDocumento8 páginasEcuacion de Shodinguer El Representacion de Los MomentosArnold crisantoAún no hay calificaciones
- Espectro de energía electrón en anillo Aharonov-BohmDocumento4 páginasEspectro de energía electrón en anillo Aharonov-BohmMarisol Hernández SánchezAún no hay calificaciones
- Teoria de La Capa Limite para Flujo Laminar y Turbulento.Documento7 páginasTeoria de La Capa Limite para Flujo Laminar y Turbulento.Tommy Ramos HernandezAún no hay calificaciones
- La Derivada Geométrica y El Cálculo GeométricoDocumento6 páginasLa Derivada Geométrica y El Cálculo GeométricoErick VelascoAún no hay calificaciones
- Ecuación de Euler: Flujo ideal, permanente e incompresibleDocumento4 páginasEcuación de Euler: Flujo ideal, permanente e incompresibleelvergalargacm35Aún no hay calificaciones
- Dinamica de La Atmósfera: Ecuaciones DiagnosticoDocumento40 páginasDinamica de La Atmósfera: Ecuaciones Diagnosticojuan_jimenez_328Aún no hay calificaciones
- Ecuaciones Generales Que Rigen El Flujo (Forma Integral)Documento16 páginasEcuaciones Generales Que Rigen El Flujo (Forma Integral)llc3nd3rllAún no hay calificaciones
- Clase Virtual Sobre Viot y SavartDocumento6 páginasClase Virtual Sobre Viot y SavartMaguii GalloAún no hay calificaciones
- TC - I Semana 3Documento21 páginasTC - I Semana 3ROBERTO RAMIREZAún no hay calificaciones
- Apuntes de Calculo VectorialDocumento44 páginasApuntes de Calculo VectorialdiegoAún no hay calificaciones
- Teorema de Stokes y Teorema de La DivergenciaDocumento8 páginasTeorema de Stokes y Teorema de La DivergenciaJoan Jesús Tipiani ValdiviaAún no hay calificaciones
- Ecuaciones de Maxwell: Ley de Gauss para el campo eléctricoDocumento9 páginasEcuaciones de Maxwell: Ley de Gauss para el campo eléctricoGary Gelmer Luque LuqueAún no hay calificaciones
- Resumen Teoría Del CampoDocumento11 páginasResumen Teoría Del CampoClaudia FernandezLopezAún no hay calificaciones
- Rotacional y Divergencia de un Campo VectorialDocumento5 páginasRotacional y Divergencia de un Campo VectorialElianethAún no hay calificaciones
- Mecánica de Fluidos - Mov Entorno Punto y CirculacionDocumento12 páginasMecánica de Fluidos - Mov Entorno Punto y CirculacionRafaelAún no hay calificaciones
- Solucion Examen Enero 22-23Documento8 páginasSolucion Examen Enero 22-23Saúl SotAún no hay calificaciones
- Apgeom 3Documento36 páginasApgeom 3pbchantaAún no hay calificaciones
- Cap 5 de Análisis Vectorial PDFDocumento14 páginasCap 5 de Análisis Vectorial PDFLuis SosaAún no hay calificaciones
- Teorema de Liouville PDFDocumento16 páginasTeorema de Liouville PDFJairo Alonso Fox RoaAún no hay calificaciones
- Campo Electrico - Distribuciones de Carga Continua (Parte 3)Documento9 páginasCampo Electrico - Distribuciones de Carga Continua (Parte 3)JosueE22Aún no hay calificaciones
- IntroDocumento9 páginasIntroomar vilchisAún no hay calificaciones
- Carnevali AM2 B3Documento3 páginasCarnevali AM2 B3JOSÉ IGNACIO MONAún no hay calificaciones
- Espesor capa límite flujo laminarDocumento4 páginasEspesor capa límite flujo laminarsandro enriqueAún no hay calificaciones
- TEMA5 Integrales Superficie StokesDocumento26 páginasTEMA5 Integrales Superficie StokesEdward PauccarAún no hay calificaciones
- Teoremas de Campos VectorialesDocumento25 páginasTeoremas de Campos VectorialesJesus CastroAún no hay calificaciones
- Tarea PDFDocumento13 páginasTarea PDFVictor Fuentes LabraAún no hay calificaciones
- U2 BASE RECIRPOCA Article V2018Documento5 páginasU2 BASE RECIRPOCA Article V2018VinicioAún no hay calificaciones
- U2 INTEGRACION VECTORIAL Article V2018Documento14 páginasU2 INTEGRACION VECTORIAL Article V2018VinicioAún no hay calificaciones
- Matrices Determinantes y Vectores CartDocumento38 páginasMatrices Determinantes y Vectores CartVinicioAún no hay calificaciones
- Levitación AcústicaDocumento14 páginasLevitación AcústicaVinicioAún no hay calificaciones
- Ejer-01-MVE (SP)-TESPDocumento2 páginasEjer-01-MVE (SP)-TESPfredy floresAún no hay calificaciones
- Tablas de Interes y Anualidades para Capitalización Continua y DiscretaDocumento23 páginasTablas de Interes y Anualidades para Capitalización Continua y DiscretaOzkr CamachoAún no hay calificaciones
- Torque Quizizz resultados claseDocumento20 páginasTorque Quizizz resultados claseAlejandro Agudelo TrejosAún no hay calificaciones
- Upn Dinam S01 (2019-2)Documento29 páginasUpn Dinam S01 (2019-2)Italoo LoliAún no hay calificaciones
- FormulasCurvilíneasEsféricasDocumento3 páginasFormulasCurvilíneasEsféricasNataly Elizabeth López AvelarAún no hay calificaciones
- Taller 1, Tercer CorteDocumento3 páginasTaller 1, Tercer Corteshirley leonAún no hay calificaciones
- Aplicaciones vectores ingenieríaDocumento6 páginasAplicaciones vectores ingenieríaMartin Eduardo Estrada Taboada100% (1)
- FísicaxdDocumento7 páginasFísicaxdNickole PlasenciaAún no hay calificaciones
- Aplicaciones del cálculo vectorial en ingenieríaDocumento23 páginasAplicaciones del cálculo vectorial en ingenieríaEduardo Michel LopezAún no hay calificaciones
- Trabajo Mate 3Documento10 páginasTrabajo Mate 3Cristhian CanoAún no hay calificaciones
- Solucion Ejercicios Vectores para 3Documento5 páginasSolucion Ejercicios Vectores para 3Emer MoriAún no hay calificaciones
- Variable ComplejaDocumento2 páginasVariable ComplejaCesar Idvorsky Gutiérrez CachiqueAún no hay calificaciones
- Descomposición VectorialDocumento4 páginasDescomposición VectorialJulio Ernesto Cafferatta EstefaneroAún no hay calificaciones
- Ejemplos OperadoresDocumento20 páginasEjemplos OperadoresMagda Lorena Garzon CorreaAún no hay calificaciones
- Campos VectorialesDocumento4 páginasCampos VectorialesLuis AnguloAún no hay calificaciones
- F 5 AÑO Análisis Vectorial S2Documento2 páginasF 5 AÑO Análisis Vectorial S2Wilder Fernandez EspinozaAún no hay calificaciones
- S12-Integral de LíneaDocumento33 páginasS12-Integral de LíneadavidAún no hay calificaciones
- Vectores EjerciciosDocumento5 páginasVectores EjerciciosGallegos DiegoAún no hay calificaciones
- CV-rotacional y DivergenciaDocumento14 páginasCV-rotacional y DivergenciaGeiy MendezAún no hay calificaciones
- Física vectores sumaDocumento6 páginasFísica vectores sumaRaul AvalosAún no hay calificaciones
- Teoría de CampoDocumento30 páginasTeoría de CampoWilber AleluyaAún no hay calificaciones
- Transformación vectores forma cartesiana cilíndrica esféricaDocumento3 páginasTransformación vectores forma cartesiana cilíndrica esféricaFélix MontañezAún no hay calificaciones
- OPERACIONES CON VECTORESDocumento6 páginasOPERACIONES CON VECTORESJuan Camilo Hernandez LopezAún no hay calificaciones
- 39 Orientacion de Superficies PDFDocumento2 páginas39 Orientacion de Superficies PDFJoel GarcíaAún no hay calificaciones
- Actividad 2.1Documento3 páginasActividad 2.1eduardo fariasAún no hay calificaciones
- Actividad 2.1 - Repaso PDFDocumento6 páginasActividad 2.1 - Repaso PDFBrain torresAún no hay calificaciones
- Campos Vectoriales Clase1Documento7 páginasCampos Vectoriales Clase1Alexander RuizAún no hay calificaciones
- Campos Vectoriales e Integrales DoblesDocumento19 páginasCampos Vectoriales e Integrales DoblesLuisAún no hay calificaciones
- EVALUACIÓN PRIMER PARCIAL Matematica2qDocumento10 páginasEVALUACIÓN PRIMER PARCIAL Matematica2qWASHINGTON JAVIER ALAVA DEL PEZOAún no hay calificaciones