También podría gustarte
- Tarea 2 Gestion TecnologicaDocumento14 páginasTarea 2 Gestion TecnologicaLILIANA ROLDAN SOTO0% (1)
- Alberto Muñoz 87Documento40 páginasAlberto Muñoz 87LILIANA ROLDAN SOTOAún no hay calificaciones
- Tarea 2 Grupo 212018 53Documento214 páginasTarea 2 Grupo 212018 53LILIANA ROLDAN SOTOAún no hay calificaciones
- Tarea Andres JaramilloDocumento8 páginasTarea Andres JaramilloLILIANA ROLDAN SOTOAún no hay calificaciones
- CimDocumento53 páginasCimJuaneco Viel CortinesAún no hay calificaciones
- Pesca Marzo 04Documento15 páginasPesca Marzo 04Sixto Siliuto RuedaAún no hay calificaciones
- UTM 56 Zona 1 MarkDocumento1 páginaUTM 56 Zona 1 MarkJose Manuel Huaman MattaAún no hay calificaciones
- Trabajo Individual Modulo I Automatización de Sistemas Industriales Patricio Diaz GDocumento10 páginasTrabajo Individual Modulo I Automatización de Sistemas Industriales Patricio Diaz GpdiazgodoyAún no hay calificaciones
- Salvese Quien Pueda (Desde La Pag 15 A La 72)Documento34 páginasSalvese Quien Pueda (Desde La Pag 15 A La 72)Alexandra GonzalezAún no hay calificaciones
- Instituto Tecnológico Superior de Coatzacoalcos División de Ingeniería IndustrialDocumento6 páginasInstituto Tecnológico Superior de Coatzacoalcos División de Ingeniería IndustrialAidee PereyraAún no hay calificaciones
- Fabricacion EstribadoraDocumento5 páginasFabricacion Estribadorawalter guzmanAún no hay calificaciones
- Camila CastedoDocumento6 páginasCamila CastedoSip BoliviaAún no hay calificaciones
- Ideas de La Automatización IndustrialDocumento13 páginasIdeas de La Automatización IndustrialErik Quijije Zambrano0% (1)
- Metodologia de La Investigacion DomoticaDocumento15 páginasMetodologia de La Investigacion DomoticaJulian QuezadaAún no hay calificaciones
- Resumen de Domotica IDocumento34 páginasResumen de Domotica IKRYSTAL LUCIA GAMBOA MARTINEZ100% (3)
- Sitrain Brochure 2018 PDFDocumento22 páginasSitrain Brochure 2018 PDFJonathanMondragónAún no hay calificaciones
- AnteproyectoDocumento8 páginasAnteproyectoLuis gutierrezAún no hay calificaciones
- Presentación Capitulos 11 - 12 - 13Documento26 páginasPresentación Capitulos 11 - 12 - 13DUVAN ARTURO CRUZ USCATEGUIAún no hay calificaciones
- 6to Diplomado Internacional en Automatización de Procesos Industriales Con Doble Certificación.. (-)Documento6 páginas6to Diplomado Internacional en Automatización de Procesos Industriales Con Doble Certificación.. (-)benjinavaAún no hay calificaciones
- Tema 07 - Introducción A La Automatización Industrial v7 - VicenteDocumento103 páginasTema 07 - Introducción A La Automatización Industrial v7 - VicenteCesar Enrique Rivera BermudezAún no hay calificaciones
- Laboratorio PLCDocumento5 páginasLaboratorio PLCAndrés OlivellaAún no hay calificaciones
- Perfil Francisco CrapuzziDocumento22 páginasPerfil Francisco CrapuzziDiego Alberto Soliz JimenezAún no hay calificaciones
- Practica Potencia Control de LuminosidadDocumento12 páginasPractica Potencia Control de LuminosidadDavid Mena MNAún no hay calificaciones
- Bitacora 3 - Proyecto - Mermelada de Rocoto ArequipeñoDocumento36 páginasBitacora 3 - Proyecto - Mermelada de Rocoto ArequipeñoLuis Miguel Paco ArceAún no hay calificaciones
- Diseño y Simulación de Un Sistema de Automatización para Una Planta Dosificadora de ConcretoDocumento20 páginasDiseño y Simulación de Un Sistema de Automatización para Una Planta Dosificadora de ConcretoGerard Vera100% (1)
- WEG CFW 09 Convert Id Ores de Frecuencia 1033 Catalogo EspanolDocumento40 páginasWEG CFW 09 Convert Id Ores de Frecuencia 1033 Catalogo Espanolvivac9Aún no hay calificaciones
- Guia Neumatica 2Documento12 páginasGuia Neumatica 2Yefer RodriguezAún no hay calificaciones
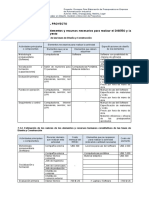
- Especificaciones Del Proyecto 7.1. Descripción de Los Elementos y Recursos Necesarios para Realizar El DISEÑO y La CONSTRUCCIÓN Del ProyectoDocumento5 páginasEspecificaciones Del Proyecto 7.1. Descripción de Los Elementos y Recursos Necesarios para Realizar El DISEÑO y La CONSTRUCCIÓN Del ProyectoIng Geranes Leger0% (1)
- Presentación 6Documento4 páginasPresentación 6Omar RamirezAún no hay calificaciones
- Cuestionario Tema 5 y 6Documento2 páginasCuestionario Tema 5 y 6Eymard RamosAún no hay calificaciones
- Automatización en El Sector AutomotrizDocumento3 páginasAutomatización en El Sector AutomotrizMumulAún no hay calificaciones
- Practica 12 PERFIL DE TESISDocumento28 páginasPractica 12 PERFIL DE TESISFernandoTejerinaSotarAún no hay calificaciones
- Tarea Unidad 8Documento7 páginasTarea Unidad 8Albert JosepAún no hay calificaciones
- Solución Del Ejercício de TMEF e TMPRDocumento22 páginasSolución Del Ejercício de TMEF e TMPRFranklin MillanAún no hay calificaciones
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- Guía de aplicacion de la ISO 9001:2015De EverandGuía de aplicacion de la ISO 9001:2015Calificación: 5 de 5 estrellas5/5 (3)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía para la aplicación de ISO 9001 2015De EverandGuía para la aplicación de ISO 9001 2015Calificación: 4 de 5 estrellas4/5 (1)
- Apuntes de diseño de interiores: Principios básicos de escalas, espacios, colores y másDe EverandApuntes de diseño de interiores: Principios básicos de escalas, espacios, colores y másCalificación: 4.5 de 5 estrellas4.5/5 (20)