También podría gustarte
- Temario Excel EmpresarialDocumento8 páginasTemario Excel EmpresarialGabriel Javier Toribio LauraAún no hay calificaciones
- MeterpreterDocumento23 páginasMeterpreterjuan lorenzo martinAún no hay calificaciones
- Microcontroladores Tarea Semana 5Documento4 páginasMicrocontroladores Tarea Semana 5frank perezAún no hay calificaciones
- Informe Tecnico de Proyeccion UTI-Estado Situacional de Computadoras Por Area - 2021Documento11 páginasInforme Tecnico de Proyeccion UTI-Estado Situacional de Computadoras Por Area - 2021Salvador AchoAún no hay calificaciones
- Arquitectura de ComputadorasDocumento62 páginasArquitectura de ComputadorasjuanAún no hay calificaciones
- IPSC Design Deploy M1 060412-v2Documento123 páginasIPSC Design Deploy M1 060412-v2Victor Hugo Abrego GarciaAún no hay calificaciones
- MACS 1-UNIDAD 4-Sistemas de Ecuaciones y AplicacionesDocumento10 páginasMACS 1-UNIDAD 4-Sistemas de Ecuaciones y Aplicacionesmiguel gtzAún no hay calificaciones
- Conceptos Magaña Gutierrez Jose MiguelDocumento3 páginasConceptos Magaña Gutierrez Jose Miguelmiguel gtzAún no hay calificaciones
- Unidad 4. - Circuitos RC y RLDocumento5 páginasUnidad 4. - Circuitos RC y RLmiguel gtzAún no hay calificaciones
- Trabajo Evaluacion Circuitos Electricos Teorema de Thevenin y SuperposiciónDocumento10 páginasTrabajo Evaluacion Circuitos Electricos Teorema de Thevenin y Superposiciónmiguel gtzAún no hay calificaciones
- Teoremas CircuitosDocumento36 páginasTeoremas Circuitosmiguel gtzAún no hay calificaciones
- Comportamiento Circuitos RLCDocumento29 páginasComportamiento Circuitos RLCmiguel gtzAún no hay calificaciones
- Práctica1 DHCP CentosDocumento31 páginasPráctica1 DHCP CentosKevin Jofraly Pérez LópezAún no hay calificaciones
- Análisis de CasoDocumento3 páginasAnálisis de CasoMonica FleitasAún no hay calificaciones
- Tema 6 MicrocontroladoresDocumento20 páginasTema 6 MicrocontroladoresWilson CanoAún no hay calificaciones
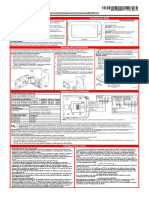
- BS060032010 Programación de Mandos A Distancia JAC RefineDocumento4 páginasBS060032010 Programación de Mandos A Distancia JAC RefinejosecastroAún no hay calificaciones
- Control Envios PCs 2022Documento85 páginasControl Envios PCs 2022CamiloAún no hay calificaciones
- Programas de FotogrametríaDocumento20 páginasProgramas de Fotogrametríasakatgintoki72Aún no hay calificaciones
- Unidad 04 - OptimizacionDocumento40 páginasUnidad 04 - OptimizacionFrank211Aún no hay calificaciones
- CONTROL PASSWORD AlumnoDocumento3 páginasCONTROL PASSWORD AlumnomartinezmarthaAún no hay calificaciones
- Exposicion Cableado EstructuradoDocumento16 páginasExposicion Cableado EstructuradoYadir Augusto Mayorga DiazAún no hay calificaciones
- PSS Error List 19714-ES-09Documento645 páginasPSS Error List 19714-ES-09icpa icpaAún no hay calificaciones
- Spanish 6280 Installation InstructioniDocumento4 páginasSpanish 6280 Installation InstructioniCristian GonzalezAún no hay calificaciones
- Examen Final 2023-20Documento4 páginasExamen Final 2023-20Zandalee erika Lopez DuranAún no hay calificaciones
- Ejercicios Script 3Documento2 páginasEjercicios Script 3Carlos Benavides LiébanasAún no hay calificaciones
- La Historia de Microsoft OfficeDocumento11 páginasLa Historia de Microsoft Officegagokiv503Aún no hay calificaciones
- M1 08 ProcesoDocumento37 páginasM1 08 ProcesoANGELICA MARIA OTALVARO MARINAún no hay calificaciones
- Software de Programación PLC-5: Referencia Del Conjunto de InstruccionesDocumento328 páginasSoftware de Programación PLC-5: Referencia Del Conjunto de InstruccionesPaco AlcedaAún no hay calificaciones
- Cuestionario 1Documento4 páginasCuestionario 1JORGE GARITA BADILLOAún no hay calificaciones
- Aplicamos El Modelo de Negocios Lean Canvas (Parte VII)Documento4 páginasAplicamos El Modelo de Negocios Lean Canvas (Parte VII)GIAM MARCOS PEREZ YUPANQUIAún no hay calificaciones
- Clases Metodos y Funciones en C++Documento2 páginasClases Metodos y Funciones en C++Diego Rivera FakesAún no hay calificaciones
- DS Ardys-NX0603Documento1 páginaDS Ardys-NX0603Richard Andres Cuadros TamayoAún no hay calificaciones
- Memoria VirtualDocumento3 páginasMemoria VirtualIsai Salgado CardenasAún no hay calificaciones
- PA03 - Sistemas Operativos.Documento13 páginasPA03 - Sistemas Operativos.Bryan Huaricapcha AriasAún no hay calificaciones
- Curso de Java para No Programadores PDFDocumento8 páginasCurso de Java para No Programadores PDFanth2005Aún no hay calificaciones
- Modulo 1 PorticosDocumento1 páginaModulo 1 PorticosvidilongoAún no hay calificaciones