También podría gustarte
- Camal de Carhuaz Final PDFDocumento23 páginasCamal de Carhuaz Final PDFGodofredo Frank Cilio Celmi100% (1)
- Know AnsibleDocumento55 páginasKnow AnsibleJuan Pablo Vargas AcostaAún no hay calificaciones
- BP11 - Instruccin de Rescate en AscensoresDocumento14 páginasBP11 - Instruccin de Rescate en AscensoresBeltran HéctorAún no hay calificaciones
- ' EsTUDIO DEL EFECTO DEL PROCESO DE SULFURIZACIÓN EN LA FLOTACIÓN DE MINERALESDocumento89 páginas' EsTUDIO DEL EFECTO DEL PROCESO DE SULFURIZACIÓN EN LA FLOTACIÓN DE MINERALESveronicaAún no hay calificaciones
- Capítulo 4 Selección de Tamaños de Malla e Intervalo de TiempoDocumento8 páginasCapítulo 4 Selección de Tamaños de Malla e Intervalo de TiempoCastrog D CastrogAún no hay calificaciones
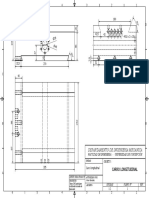
- Plano N°1 Carro LongitudinalDocumento1 páginaPlano N°1 Carro LongitudinalAlonso ATAún no hay calificaciones
- La Banda TransportadoraDocumento10 páginasLa Banda TransportadoraEfrsin Gasca VázquezAún no hay calificaciones
- Puesto de Salud La Union-A-02Documento1 páginaPuesto de Salud La Union-A-02DanielJaraAbantoAún no hay calificaciones
- Diseño Pav. Flexibles-AASHTO 93Documento18 páginasDiseño Pav. Flexibles-AASHTO 93JosePerezAún no hay calificaciones
- Manual de Partes Venom 18 Ene 2024Documento51 páginasManual de Partes Venom 18 Ene 2024motocartoritoAún no hay calificaciones
- s11 Virtual Reporte Momento de InerciaDocumento5 páginass11 Virtual Reporte Momento de InerciaAlison jsmAún no hay calificaciones
- s12.s1 - Material. Transformada - Funcion Escalon UnitarioDocumento19 páginass12.s1 - Material. Transformada - Funcion Escalon UnitarioOlger Aragon BerlangaAún no hay calificaciones
- TangentesDocumento6 páginasTangentesSAMUEL GILBER ORTIZ JAIMESAún no hay calificaciones
- Nte Inen Iso 3779-1extractoDocumento4 páginasNte Inen Iso 3779-1extractodominic1107Aún no hay calificaciones
- Quiz 75Documento4 páginasQuiz 75Andrea CastelblancoAún no hay calificaciones
- (Freon MO99) : Especificaciones DE LAS Garantías ComercialesDocumento2 páginas(Freon MO99) : Especificaciones DE LAS Garantías ComercialesRuben Dario Dorante RomeroAún no hay calificaciones
- Analisis de CircuitosDocumento24 páginasAnalisis de CircuitosAdrián CordovaAún no hay calificaciones
- Unidad IIIDocumento44 páginasUnidad IIIcaresan100% (6)
- Completaciones A Hoyo Revestido Con Empaque Con GravaDocumento2 páginasCompletaciones A Hoyo Revestido Con Empaque Con GravaAlfredo Eloy UrbinaAún no hay calificaciones
- IHSHS007-GCU HSE ExamDocumento7 páginasIHSHS007-GCU HSE Exammj lozanoAún no hay calificaciones
- 11 10 1 PB PDFDocumento8 páginas11 10 1 PB PDFJhonernest Berrios GallegoAún no hay calificaciones
- METRADOS EJEC-mayo 02Documento5 páginasMETRADOS EJEC-mayo 02DAMJER REY QUISPE CHANCAYAURIAún no hay calificaciones
- Cyt - Fenómenos Moleculares - Vilma - 19 - SepDocumento5 páginasCyt - Fenómenos Moleculares - Vilma - 19 - SepVilma Gladis Rios Hilario100% (1)
- Informe Reflexivo Ingenieria de SistemasDocumento3 páginasInforme Reflexivo Ingenieria de SistemasJHON JAIDER VIAFARA AGUILARAún no hay calificaciones
- Examen ParcialDocumento2 páginasExamen ParcialJoseant Dlcg0% (1)
- InvoiceDocumento2 páginasInvoicelacostamotorAún no hay calificaciones
- Precipitadores Electrostáticos en HúmedoDocumento5 páginasPrecipitadores Electrostáticos en HúmedoMarlen TlapancoAún no hay calificaciones
- Ejemplo-5p5 p149 r4 Esfuerzo-PlanoDocumento13 páginasEjemplo-5p5 p149 r4 Esfuerzo-Planoingeniero1986Aún no hay calificaciones
- INFORME (Formato)Documento10 páginasINFORME (Formato)Jair GutierrezAún no hay calificaciones
- Cuerpo Rigidos Taller Presentación - 2022 - IDocumento8 páginasCuerpo Rigidos Taller Presentación - 2022 - IHARRISON FERNEY MARTINEZ QUINTO100% (1)