También podría gustarte
- Movimiento relativo traslación rotaciónDocumento13 páginasMovimiento relativo traslación rotaciónBraulio CastilloAún no hay calificaciones
- Ejes Traslacion RotacionDocumento13 páginasEjes Traslacion RotacionJean Pierre Guanilo RiveraAún no hay calificaciones
- Ejes Traslacion Rotacion PDFDocumento11 páginasEjes Traslacion Rotacion PDFCloaldo Landa VargasAún no hay calificaciones
- Ejes Traslacion Rotacion PDFDocumento11 páginasEjes Traslacion Rotacion PDFlino jesusAún no hay calificaciones
- Ejes Traslacion Rotacion PDFDocumento11 páginasEjes Traslacion Rotacion PDFarkangels16Aún no hay calificaciones
- Ejes Traslacion RotacionDocumento10 páginasEjes Traslacion RotacionByron Giácomo Trigoso MarínAún no hay calificaciones
- Ejes Traslacion Rotacion PDFDocumento11 páginasEjes Traslacion Rotacion PDFCristian Jallo CruzAún no hay calificaciones
- Tema 3Documento42 páginasTema 3INÉS CÁCERES PABLOAún no hay calificaciones
- II-Movimiento Relativo-2020-21 JMCDocumento35 páginasII-Movimiento Relativo-2020-21 JMCoacrAún no hay calificaciones
- Captura de Pantalla 2024-02-26 A La(s) 8.18.41 A.M.Documento16 páginasCaptura de Pantalla 2024-02-26 A La(s) 8.18.41 A.M.Francisco Emilio Cervantes SilvaAún no hay calificaciones
- Movemento Relativo PDFDocumento10 páginasMovemento Relativo PDFBinary_DeathAún no hay calificaciones
- 1 Cinematica PDFDocumento60 páginas1 Cinematica PDFBenjamin StaffordAún no hay calificaciones
- Semana 12 Julca Chavez Dem KevinDocumento10 páginasSemana 12 Julca Chavez Dem KevinKevin J ChávezAún no hay calificaciones
- FÍSICA CinemáticaDocumento28 páginasFÍSICA CinemáticaLoana MartinAún no hay calificaciones
- Utn Fisica 1 ApunteDocumento8 páginasUtn Fisica 1 ApuntekdsjcnAún no hay calificaciones
- Flujo Potencial 2019-I IM UNT PDFDocumento34 páginasFlujo Potencial 2019-I IM UNT PDFDeckert AsencioAún no hay calificaciones
- TEMA 3 Mov. Una Dimension (Rectilineo) (Texto)Documento27 páginasTEMA 3 Mov. Una Dimension (Rectilineo) (Texto)Mayver CuetoAún no hay calificaciones
- Cinematic ADocumento33 páginasCinematic ADaniel UlloaAún no hay calificaciones
- Analisis Del Movimiento Relativo Parte 2Documento5 páginasAnalisis Del Movimiento Relativo Parte 2walter moquillazaAún no hay calificaciones
- Texto Nº 4Documento114 páginasTexto Nº 4Yudy M Reyes TejedaAún no hay calificaciones
- Tema 3Documento19 páginasTema 3Ijust WantabukAún no hay calificaciones
- Texto Nº 4Documento112 páginasTexto Nº 4Katerine Staley100% (2)
- Semana 3Documento73 páginasSemana 3Jossué Aarón Aguirre FloresAún no hay calificaciones
- Sem03 U1Documento55 páginasSem03 U1ANDRE JEAN PIERRE MACHUCA LINGANAún no hay calificaciones
- Cap 02Documento68 páginasCap 02Frank Ronneseth DionicioAún no hay calificaciones
- Cálculo avanzado para ingeniería en nanotecnologíaDocumento55 páginasCálculo avanzado para ingeniería en nanotecnologíaJOJOJO jejejeAún no hay calificaciones
- Movimiento Plano de Los FluidosDocumento25 páginasMovimiento Plano de Los FluidosRudolf Keith Muñoz CristobalAún no hay calificaciones
- T4 Herramientas Matemáticas para La Localizació Espacial - OCW - Revision PDFDocumento79 páginasT4 Herramientas Matemáticas para La Localizació Espacial - OCW - Revision PDFLuisAún no hay calificaciones
- Practica Nro 8 - Regresion y Correlacion SimpleDocumento7 páginasPractica Nro 8 - Regresion y Correlacion SimpleFiorella Juliano Tello0% (1)
- Free Examen Ordinaria 2021Documento8 páginasFree Examen Ordinaria 2021Rodrigo PérezAún no hay calificaciones
- Lección 2 - Cinemática - 2017-18 - EstudiantesDocumento43 páginasLección 2 - Cinemática - 2017-18 - EstudiantesCarolina Caballero MedinaAún no hay calificaciones
- Cinematica Cuerpo RigidoDocumento17 páginasCinematica Cuerpo RigidoPatricia Hoyos Matías100% (1)
- Ley de Los Grandes NumerosDocumento6 páginasLey de Los Grandes NumerosLuis BautistaAún no hay calificaciones
- Sistemas de Coordenadas CurvilíneasDocumento4 páginasSistemas de Coordenadas CurvilíneasFrank Evangelista TarazonaAún no hay calificaciones
- Trigonometría-Intermedio - T1Documento10 páginasTrigonometría-Intermedio - T1Moy PaucarAún no hay calificaciones
- Movimiento Rectilineo Lineal PDFDocumento12 páginasMovimiento Rectilineo Lineal PDFMari HernándezAún no hay calificaciones
- Metodo de RigidezDocumento18 páginasMetodo de RigidezAnonymous G6a98ENAún no hay calificaciones
- Movimiento Descrito en Coordenadas PolaresDocumento12 páginasMovimiento Descrito en Coordenadas PolaresAyni Cordova HuaytaraAún no hay calificaciones
- Relatividad EpecialDocumento40 páginasRelatividad Epecialrobertofa75% (4)
- 6 Cinematica Del Movimiento RelativoDocumento33 páginas6 Cinematica Del Movimiento RelativoPau BernabeuAún no hay calificaciones
- Sistema de Coordenadas en Movimiento-Semana 2 - Mecánica Clásica - UNFVDocumento30 páginasSistema de Coordenadas en Movimiento-Semana 2 - Mecánica Clásica - UNFVAnonymous I6GwyC1IAún no hay calificaciones
- Ajuste Lineal LaboratorioDocumento7 páginasAjuste Lineal Laboratorioandrey ramirez mahechaAún no hay calificaciones
- 04 Reflexion y Refraccion en DielectricosDocumento36 páginas04 Reflexion y Refraccion en Dielectricoskimoli90Aún no hay calificaciones
- Capítulo 1 Lamar-Fortoul Nociones de Mecánica AnalíticaDocumento20 páginasCapítulo 1 Lamar-Fortoul Nociones de Mecánica AnalíticaDaniel SanchezAún no hay calificaciones
- Chapter 3Documento17 páginasChapter 3AndreaAún no hay calificaciones
- Lab Nº2 - Orientación Espacial - 2022 - ImparDocumento8 páginasLab Nº2 - Orientación Espacial - 2022 - ImparJose OlazabalAún no hay calificaciones
- CinemáticaDocumento112 páginasCinemáticaRodrigo Konejo BodaleoAún no hay calificaciones
- Fisica RelativistaDocumento27 páginasFisica RelativistaNAOMI SEGUNDO CRUZAún no hay calificaciones
- Sistemas de coordenadas en movimiento y fuerzas ficticiasDocumento30 páginasSistemas de coordenadas en movimiento y fuerzas ficticiasAnonymous I6GwyC1IAún no hay calificaciones
- Vectorial y coordenadas en 3DDocumento22 páginasVectorial y coordenadas en 3Dtania fabianAún no hay calificaciones
- Razones trigonométricas de ángulos en posición normalDocumento5 páginasRazones trigonométricas de ángulos en posición normalhectorAún no hay calificaciones
- Lab Nº2Documento14 páginasLab Nº2Jose OlazabalAún no hay calificaciones
- Tema 3Documento5 páginasTema 3XxCanaryGamexX CTAún no hay calificaciones
- II-QUI. SESIÓN 03 Números CuánticosDocumento5 páginasII-QUI. SESIÓN 03 Números CuánticosMATUMAY NAPAICO ADRIANA DEL CARMENAún no hay calificaciones
- Posición Velocidad AceleraciónDocumento22 páginasPosición Velocidad AceleraciónMarina RíosAún no hay calificaciones
- SEMANA 1 - Cinemática de La Partícula en Movimiento AbsolutoDocumento79 páginasSEMANA 1 - Cinemática de La Partícula en Movimiento AbsolutoHilary Diaz ReyesAún no hay calificaciones
- Informe 2Documento13 páginasInforme 2Katherine RodriguezAún no hay calificaciones
- Ficha de La Sesion 3 - Cinematica MruDocumento2 páginasFicha de La Sesion 3 - Cinematica Mrujosechirinos42Aún no hay calificaciones
- Solubilidad de ecuaciones elípticas y parabólicasDe EverandSolubilidad de ecuaciones elípticas y parabólicasAún no hay calificaciones
- Anexo Taller 02 - Grupo #10Documento12 páginasAnexo Taller 02 - Grupo #10Jorge Ganto PelaezAún no hay calificaciones
- MaryDocumento1 páginaMaryJorge Ganto PelaezAún no hay calificaciones
- Enunciado Práctica 8Documento4 páginasEnunciado Práctica 8Jorge Ganto PelaezAún no hay calificaciones
- CLIMADocumento4 páginasCLIMAJorge Ganto PelaezAún no hay calificaciones
- Para Indicadores - Co822-H - 2022-IIDocumento20 páginasPara Indicadores - Co822-H - 2022-IIJorge Ganto PelaezAún no hay calificaciones
- Solución - PC7 y PC8Documento37 páginasSolución - PC7 y PC8Jorge Ganto PelaezAún no hay calificaciones
- Reducción de La Energía Transporte y MovilidadDocumento26 páginasReducción de La Energía Transporte y MovilidadJorge Ganto PelaezAún no hay calificaciones
- SeminarioDocumento4 páginasSeminarioJorge Ganto PelaezAún no hay calificaciones
- U2.7 Sequias Rev A PDFDocumento38 páginasU2.7 Sequias Rev A PDFmichael lozano pajueloAún no hay calificaciones
- Demanda para La Navegacion FluvialDocumento21 páginasDemanda para La Navegacion FluvialRONALD CISNEROS BARRIENTOSAún no hay calificaciones
- RecursoHidricoHH333Documento264 páginasRecursoHidricoHH333Jorge Ganto PelaezAún no hay calificaciones
- Ana0002364 62Documento21 páginasAna0002364 62Jorge Ganto PelaezAún no hay calificaciones
- DV - T 2B Formulas Vehic SET 2021Documento28 páginasDV - T 2B Formulas Vehic SET 2021Jorge Ganto PelaezAún no hay calificaciones
- TE - 02 - Educación Pública en Zonas Andinas - SelváticasDocumento1 páginaTE - 02 - Educación Pública en Zonas Andinas - SelváticasJorge Ganto PelaezAún no hay calificaciones
- Cambios de la revolución industrial y agrícolaDocumento3 páginasCambios de la revolución industrial y agrícolaJorge Ganto PelaezAún no hay calificaciones
- Seminario Sesión 02 EIA FIC UNIDocumento18 páginasSeminario Sesión 02 EIA FIC UNIJorge Ganto PelaezAún no hay calificaciones
- Resumen para El TE2Documento2 páginasResumen para El TE2Jorge Ganto PelaezAún no hay calificaciones
- TE - 02 - Educación Pública en Zonas Andinas - SelváticasDocumento1 páginaTE - 02 - Educación Pública en Zonas Andinas - SelváticasJorge Ganto PelaezAún no hay calificaciones
- Ep Es531gDocumento1 páginaEp Es531gJorge Ganto PelaezAún no hay calificaciones
- TODOCICLOHIDRODocumento171 páginasTODOCICLOHIDROJorge Ganto PelaezAún no hay calificaciones
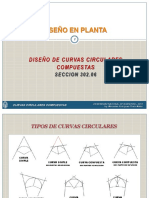
- Diseño en planta: Banqueta de visibilidadDocumento31 páginasDiseño en planta: Banqueta de visibilidadJorge Ganto PelaezAún no hay calificaciones
- 2PHH113 2022-1Documento1 página2PHH113 2022-1Jorge Ganto PelaezAún no hay calificaciones
- Ilovepdf MergedDocumento85 páginasIlovepdf MergedJorge Ganto PelaezAún no hay calificaciones
- Sesion 05 - Eia Fic UniDocumento47 páginasSesion 05 - Eia Fic UniJorge Ganto PelaezAún no hay calificaciones
- Ilovepdf MergedDocumento96 páginasIlovepdf MergedJorge Ganto PelaezAún no hay calificaciones
- PC-01 2021 IDocumento2 páginasPC-01 2021 IJorge Ganto PelaezAún no hay calificaciones
- Linea de Tiempo de Los Instrumentos de Gestion Ambiental Del Proyecto Minero Las BambasDocumento1 páginaLinea de Tiempo de Los Instrumentos de Gestion Ambiental Del Proyecto Minero Las BambasJorge Ganto PelaezAún no hay calificaciones
- PC-01 2021 IDocumento2 páginasPC-01 2021 IJorge Ganto PelaezAún no hay calificaciones
- 1P Ec513h 2021-2Documento2 páginas1P Ec513h 2021-2Jorge Ganto PelaezAún no hay calificaciones
- HH224 - H LAB 1 PERDIDAS DE CARGA EN TUBERIAS Guia ComplementariaDocumento4 páginasHH224 - H LAB 1 PERDIDAS DE CARGA EN TUBERIAS Guia ComplementariaJorge Ganto PelaezAún no hay calificaciones
- Informe de Lectura Unidad I, Yirandy AmadorDocumento5 páginasInforme de Lectura Unidad I, Yirandy AmadorBeatiful Travel'sAún no hay calificaciones
- 425 Lott Oposición Al Acto Admisión de Reenganche SR JoseDocumento2 páginas425 Lott Oposición Al Acto Admisión de Reenganche SR JoseArvelisRdrAún no hay calificaciones
- Recursos en Materia CivilDocumento14 páginasRecursos en Materia Civilalex lissnher morocco sucapuca0% (1)
- Contrato de Compraventa Vehiculo AutomotorDocumento2 páginasContrato de Compraventa Vehiculo AutomotorYasminGarcesCaceresAún no hay calificaciones
- Qué Es Un ConvenioDocumento17 páginasQué Es Un ConvenioGerardo Nelson Conislla HuaraccAún no hay calificaciones
- Derechos constitucionales examen 15-205 ptsDocumento5 páginasDerechos constitucionales examen 15-205 ptsNicole PradenaAún no hay calificaciones
- Hospital de PedernalesDocumento60 páginasHospital de PedernalesRosita ZambranoAún no hay calificaciones
- Constitucion Empresas FinancierasDocumento7 páginasConstitucion Empresas FinancierasJosé César Huarachi calisayaAún no hay calificaciones
- Proyecto - Los 10 Mandamientos en El MatrimonioDocumento22 páginasProyecto - Los 10 Mandamientos en El MatrimonioErnesto100% (2)
- Crisis FinancierasDocumento58 páginasCrisis FinancierasYineth Juliana Castro MahechaAún no hay calificaciones
- Informe 3Documento2 páginasInforme 3Anghel RamirezAún no hay calificaciones
- El Negocio de Las Ars y Las FarmaceuticasDocumento9 páginasEl Negocio de Las Ars y Las Farmaceuticaserika mendez torresAún no hay calificaciones
- Nussbaum, M.C. - Las Mujeres y El Desarrollo (Cap. 1)Documento49 páginasNussbaum, M.C. - Las Mujeres y El Desarrollo (Cap. 1)Cristian foreroAún no hay calificaciones
- ConciliosDocumento8 páginasConcilioslester96Aún no hay calificaciones
- Instrumentos Financieros NIF C2Documento8 páginasInstrumentos Financieros NIF C2Karla GarciaAún no hay calificaciones
- Reglamento Conferimiento Titulos Actos de GradoDocumento11 páginasReglamento Conferimiento Titulos Actos de GradoVictor ColmenaresAún no hay calificaciones
- Abordaje Del Tema Mujer en Radio, Prensa y TelevisiónDocumento67 páginasAbordaje Del Tema Mujer en Radio, Prensa y TelevisiónEdwin MijangosAún no hay calificaciones
- 21 de septiembre: Día del estudiante, médico y amorDocumento1 página21 de septiembre: Día del estudiante, médico y amormarceloAún no hay calificaciones
- Inicio de Demanda de Proceso LaboralDocumento15 páginasInicio de Demanda de Proceso LaboralBriggit Estefani Tinoco BlacidoAún no hay calificaciones
- Funciones y Competencias de Las Autoridades de TrabajoDocumento6 páginasFunciones y Competencias de Las Autoridades de TrabajoDaniel Perez MoralesAún no hay calificaciones
- Ley de Propiedad en Condominio para El Estado de Guerrero 557 2021-03-10Documento38 páginasLey de Propiedad en Condominio para El Estado de Guerrero 557 2021-03-10Yanira RiveraAún no hay calificaciones
- Cuestionario Derecho ProcesalDocumento224 páginasCuestionario Derecho ProcesalSonia Carrizo Arancibia88% (25)
- Mdelo INFORME ESTADÍSTICO Sobre TributacionDocumento32 páginasMdelo INFORME ESTADÍSTICO Sobre TributacionVacilica Flores Porras0% (1)
- DescartesDocumento166 páginasDescartesLa Pocha Morfoni100% (1)
- Cuentas de Patrimonio Clase 3Documento10 páginasCuentas de Patrimonio Clase 3Alexander Nu AyAún no hay calificaciones
- Reorganizacion de SociedadesDocumento24 páginasReorganizacion de SociedadesCarlos MinanoAún no hay calificaciones
- Habilitaciones UrbanasDocumento47 páginasHabilitaciones UrbanasPamela Fiorella Bautista Enciso100% (3)
- Poder amplio para compraventa y representación legalDocumento5 páginasPoder amplio para compraventa y representación legalDennis Enrico Salgado PeñaAún no hay calificaciones
- Los Principios Del Derecho Del Trabajo The Principles of Labour Law Julio E. LalanneDocumento44 páginasLos Principios Del Derecho Del Trabajo The Principles of Labour Law Julio E. LalannehenryAún no hay calificaciones
- Ej Electro p1 PDFDocumento38 páginasEj Electro p1 PDFJayceemikel100% (1)