También podría gustarte
- 11 Trouble+Shooting - En.es PDFDocumento17 páginas11 Trouble+Shooting - En.es PDFtu_negro_luisAún no hay calificaciones
- 02 ACD3+PCB - En.esDocumento32 páginas02 ACD3+PCB - En.estu_negro_luis100% (2)
- 09 GECB+Parameter - En.es PDFDocumento27 páginas09 GECB+Parameter - En.es PDFtu_negro_luisAún no hay calificaciones
- 06 Preparation - En.esDocumento24 páginas06 Preparation - En.estu_negro_luisAún no hay calificaciones
- 03 Wiring - En.es PDFDocumento8 páginas03 Wiring - En.es PDFtu_negro_luisAún no hay calificaciones
- 07 RBI - En.es PDFDocumento4 páginas07 RBI - En.es PDFtu_negro_luis100% (1)
- Conociendo la LCB IIDocumento27 páginasConociendo la LCB IIMoises Perello100% (1)
- 05 SVC+Tool - En.es PDFDocumento56 páginas05 SVC+Tool - En.es PDFtu_negro_luis100% (3)
- Guía usuario controlador magnetismo permanenteDocumento38 páginasGuía usuario controlador magnetismo permanentetu_negro_luisAún no hay calificaciones
- Guía de depuración del elevador sin sala de máquinas Mitsubishi ELENESSA (VFGLDocumento16 páginasGuía de depuración del elevador sin sala de máquinas Mitsubishi ELENESSA (VFGLadfa9Aún no hay calificaciones
- IRC 35-07-1 (DIAGI, Utilizacion y Funciones)Documento52 páginasIRC 35-07-1 (DIAGI, Utilizacion y Funciones)genaro caruzzoAún no hay calificaciones
- Instrucciones de Campo. Acd3 Ovf 401,402Documento58 páginasInstrucciones de Campo. Acd3 Ovf 401,402Moises Perello100% (1)
- 09 - GECB ParameterDocumento147 páginas09 - GECB ParameterMoises PerelloAún no hay calificaciones
- Panel Con Placa de Servicio .SpbciiiDocumento29 páginasPanel Con Placa de Servicio .SpbciiiMoises PerelloAún no hay calificaciones
- Parametros de Configuración DestacaDocumento25 páginasParametros de Configuración DestacavitoAún no hay calificaciones
- 01 ACD3+System - Ko.esDocumento9 páginas01 ACD3+System - Ko.estu_negro_luis100% (2)
- Sigma Di 210 RepuestosDocumento18 páginasSigma Di 210 Repuestosangela1590Aún no hay calificaciones
- Sigma Manual - EspDocumento17 páginasSigma Manual - EspFelipe Raul Chumpitaz Guevara100% (1)
- BCB Boar OtisDocumento13 páginasBCB Boar Otisangela1590Aún no hay calificaciones
- Codigo de EventosDocumento21 páginasCodigo de EventosAnonymous phQlqHAún no hay calificaciones
- Tabla de Códigos de Eventos GECBDocumento14 páginasTabla de Códigos de Eventos GECBMoises Perello50% (2)
- CRONO - VVVF FE FrenicLift PDFDocumento24 páginasCRONO - VVVF FE FrenicLift PDFmigmarelAún no hay calificaciones
- LWB Rutina de Puesta en MarchaDocumento10 páginasLWB Rutina de Puesta en MarchaTheKauti0nAún no hay calificaciones
- Comunicação Bidirecçional OronaDocumento2 páginasComunicação Bidirecçional OronaJose AlmeidaAún no hay calificaciones
- 4.-Procedimiento de Rescate 5400Documento1 página4.-Procedimiento de Rescate 5400FabiánIgnacioLagosCarvachoAún no hay calificaciones
- Stvf5 Manual (English)Documento39 páginasStvf5 Manual (English)JULIO100% (1)
- CENIA UpDocumento23 páginasCENIA Upantonio0% (1)
- Excel FV Manual Schildler Aveca Santalucia 2013 Wod PDFDocumento249 páginasExcel FV Manual Schildler Aveca Santalucia 2013 Wod PDFMario Sergio NascimentoAún no hay calificaciones
- Vdocuments - MX - Manual de Consultapdf PDFDocumento146 páginasVdocuments - MX - Manual de Consultapdf PDFtu_negro_luisAún no hay calificaciones
- Otis NE-300 (Esquema 3907-ST)Documento8 páginasOtis NE-300 (Esquema 3907-ST)sergioAún no hay calificaciones
- IRC 35 - 03 (Puesta en Marcha)Documento54 páginasIRC 35 - 03 (Puesta en Marcha)Charles Albert Esquivel EspinozaAún no hay calificaciones
- Tipos de Estaciones RemotasDocumento48 páginasTipos de Estaciones RemotasMoises PerelloAún no hay calificaciones
- Planos 2012 - 71 - 119919 - MB PDFDocumento27 páginasPlanos 2012 - 71 - 119919 - MB PDFwildor01100% (1)
- Indice M33OPT - M33EXT - ARCA2Documento179 páginasIndice M33OPT - M33EXT - ARCA2Chang ChangAún no hay calificaciones
- IRC 35-07-3 (DIAGI, Posiciones de Memoria)Documento18 páginasIRC 35-07-3 (DIAGI, Posiciones de Memoria)genaro caruzzoAún no hay calificaciones
- TMS600Documento32 páginasTMS600Beltran HéctorAún no hay calificaciones
- Configuración y ajuste de la puerta de confianza XiziDocumento18 páginasConfiguración y ajuste de la puerta de confianza Xizitu_negro_luisAún no hay calificaciones
- Catalogo Lift Control Solutions 2017 PDFDocumento18 páginasCatalogo Lift Control Solutions 2017 PDFframbert11Aún no hay calificaciones
- 03 Prestaciones Del SistemaDocumento13 páginas03 Prestaciones Del Sistemagustavo sanchez100% (1)
- Manual de La Herramienta de Servicio Al ClienteDocumento54 páginasManual de La Herramienta de Servicio Al Clientetu_negro_luis0% (1)
- SCHINDLER (Display Con Maniobra Miconic-B) PDFDocumento4 páginasSCHINDLER (Display Con Maniobra Miconic-B) PDFjose daniel mendoza100% (1)
- Procedimiento Cambio de Encoders en Máquina GeN2 Comfort y GeN2 FlexDocumento3 páginasProcedimiento Cambio de Encoders en Máquina GeN2 Comfort y GeN2 FlexInter Andina100% (2)
- Guía rápida del útil de pruebasDocumento93 páginasGuía rápida del útil de pruebasMoises PerelloAún no hay calificaciones
- IRC 35 - 05 (Prueba de Los Equipos de Seguridad)Documento6 páginasIRC 35 - 05 (Prueba de Los Equipos de Seguridad)Charles Albert Esquivel EspinozaAún no hay calificaciones
- 10D.01. - Maniobra Miconic de Escaleras (Man. 57)Documento118 páginas10D.01. - Maniobra Miconic de Escaleras (Man. 57)Reynold Suarez100% (1)
- Variador de Frecuencia 3VFMAC-DSP V 0.2 Mar 04Documento27 páginasVariador de Frecuencia 3VFMAC-DSP V 0.2 Mar 04JoséRodríguezAún no hay calificaciones
- Retrofit Instruction (EJ 41'601'294) sv00Documento15 páginasRetrofit Instruction (EJ 41'601'294) sv00Viiviianiita LoPez100% (3)
- Schema Carlos Silva TPR-70 HIDRA DIRDocumento28 páginasSchema Carlos Silva TPR-70 HIDRA DIRJuanmanuel BarroyetaAún no hay calificaciones
- Captura de Pantalla 2020-10-06 A La(s) 12.43.09Documento46 páginasCaptura de Pantalla 2020-10-06 A La(s) 12.43.09Miguel villalon machucaAún no hay calificaciones
- Maniobra Otis - COMPASS (Sistema de Control de Llamadas) - Instalacion Y MantenimientoDocumento74 páginasManiobra Otis - COMPASS (Sistema de Control de Llamadas) - Instalacion Y MantenimientoRaquel Lins100% (1)
- NacurDocumento60 páginasNacurAnonymous 08CFtxeyOjAún no hay calificaciones
- Otis DriveDocumento19 páginasOtis DriveMoises PerelloAún no hay calificaciones
- Ascensores Eurolift 5400Documento44 páginasAscensores Eurolift 5400rafael quiaroAún no hay calificaciones
- Manual EninterDocumento52 páginasManual EninterKaarymm Dominguez100% (1)
- Otis RBI Cintas Tractoras ManualDocumento3 páginasOtis RBI Cintas Tractoras ManualServtec Manutenções100% (1)
- ArchivetempREP TIPO 8 ESDocumento27 páginasArchivetempREP TIPO 8 ESCarlos Manuel Pinto Guerra100% (1)
- Programación básica Kuka R650 R850Documento56 páginasProgramación básica Kuka R650 R850David MartinezAún no hay calificaciones
- TQ1 002 - S Torque 820 Brochure - Spanish (Web)Documento16 páginasTQ1 002 - S Torque 820 Brochure - Spanish (Web)VR DanAún no hay calificaciones
- Antenas verticales para bajas frecuencias: (MF y HF)De EverandAntenas verticales para bajas frecuencias: (MF y HF)Aún no hay calificaciones
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselDe EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselCalificación: 3.5 de 5 estrellas3.5/5 (3)
- 07 RBI - En.es PDFDocumento4 páginas07 RBI - En.es PDFtu_negro_luis100% (1)
- 05 SVC+Tool - En.es PDFDocumento56 páginas05 SVC+Tool - En.es PDFtu_negro_luis100% (3)
- 04 MSK - En.esDocumento4 páginas04 MSK - En.estu_negro_luisAún no hay calificaciones
- Configuración y ajuste de la puerta de confianza XiziDocumento18 páginasConfiguración y ajuste de la puerta de confianza Xizitu_negro_luisAún no hay calificaciones
- RSL Lista de Entradas y Salidas PDFDocumento42 páginasRSL Lista de Entradas y Salidas PDFtu_negro_luisAún no hay calificaciones
- DDS+User+Manual+V1 5 en EsDocumento53 páginasDDS+User+Manual+V1 5 en Estu_negro_luisAún no hay calificaciones
- ZH-CNDocumento212 páginasZH-CNangela1590Aún no hay calificaciones
- DDS+User+Manual+V1 5 en EsDocumento53 páginasDDS+User+Manual+V1 5 en Estu_negro_luisAún no hay calificaciones
- 01 ACD3+System - Ko.esDocumento9 páginas01 ACD3+System - Ko.estu_negro_luis100% (2)
- Libro Ebo-Adimu (Pag 58)Documento97 páginasLibro Ebo-Adimu (Pag 58)Gregorio Guerra100% (2)
- EboraDocumento146 páginasEboraMárcio Reguera Pavan96% (28)
- Manual para Freigthliner DaimlerDocumento65 páginasManual para Freigthliner DaimlerGeorge Lopezz100% (5)
- Software Documento Base de Lanzamiento PDFDocumento47 páginasSoftware Documento Base de Lanzamiento PDFtu_negro_luis100% (1)
- Ifa y El Lenguaje Binario:No Sera Mejor El Tic Tac Toe?Documento16 páginasIfa y El Lenguaje Binario:No Sera Mejor El Tic Tac Toe?AguiladIfaFoundation33% (3)
- Manual de La Herramienta de Servicio Al ClienteDocumento54 páginasManual de La Herramienta de Servicio Al Clientetu_negro_luis0% (1)
- RSL Lista de Entradas y Salidas PDFDocumento42 páginasRSL Lista de Entradas y Salidas PDFtu_negro_luisAún no hay calificaciones
- Curso Ifa espanhol — 16 signos adivinatoriosDocumento49 páginasCurso Ifa espanhol — 16 signos adivinatoriostu_negro_luis100% (1)
- Guía usuario controlador magnetismo permanenteDocumento38 páginasGuía usuario controlador magnetismo permanentetu_negro_luisAún no hay calificaciones
- Software Documento Base de Lanzamiento PDFDocumento47 páginasSoftware Documento Base de Lanzamiento PDFtu_negro_luis100% (1)
- Vdocuments - MX - Manual de Consultapdf PDFDocumento146 páginasVdocuments - MX - Manual de Consultapdf PDFtu_negro_luisAún no hay calificaciones
- Metafisica 23-10Documento8 páginasMetafisica 23-10Anonymous 8bbVmLtQAún no hay calificaciones
- Manual Baba Law o FinalDocumento209 páginasManual Baba Law o Finaltu_negro_luis100% (3)
- Ogbe TuaDocumento3 páginasOgbe Tuatu_negro_luisAún no hay calificaciones
- Ifa y El Lenguaje Binario:No Sera Mejor El Tic Tac Toe?Documento16 páginasIfa y El Lenguaje Binario:No Sera Mejor El Tic Tac Toe?AguiladIfaFoundation33% (3)
- Normas ISO para sistemas de tuberías plásticasDocumento8 páginasNormas ISO para sistemas de tuberías plásticasCesar Joice H. Sanchez VillanuevaAún no hay calificaciones
- La Tribuna PDF Lwebll 31052020Documento20 páginasLa Tribuna PDF Lwebll 31052020Silvia Gonzalez CariasAún no hay calificaciones
- Riego Por SuperficieDocumento7 páginasRiego Por SuperficieDavid Ramos Huaman100% (1)
- Verdadera HombriaDocumento2 páginasVerdadera HombriaJuan Morales GarcíaAún no hay calificaciones
- Procesos de reproducción asexual y sexualDocumento7 páginasProcesos de reproducción asexual y sexualmguadalupe2Aún no hay calificaciones
- Diseño de mezcla de concreto hidráulico para 270 kg/cm2Documento11 páginasDiseño de mezcla de concreto hidráulico para 270 kg/cm2Nitram Lopez TlehuactleAún no hay calificaciones
- Termo PlusDocumento9 páginasTermo PlusZeus RamirezAún no hay calificaciones
- Jesús es el camino, la verdad y la vidaDocumento1 páginaJesús es el camino, la verdad y la vidaJorge Pedro Condori NeiraAún no hay calificaciones
- Taller Adultos MayoresDocumento23 páginasTaller Adultos MayoresGael J. Beat100% (1)
- Sindromes ColicosDocumento12 páginasSindromes ColicosKarly GarciaAún no hay calificaciones
- Guia Tomate Rinon FinalDocumento80 páginasGuia Tomate Rinon FinalGabriela VinuezaAún no hay calificaciones
- Aristóteles La Ética A NicómacoDocumento6 páginasAristóteles La Ética A NicómacoBeatriz LasherasAún no hay calificaciones
- Arquitectura inca: solidez, sencillez y simetríaDocumento3 páginasArquitectura inca: solidez, sencillez y simetríaVerónica Rodriguez OrtizAún no hay calificaciones
- Análisis de aceites vegetales comestiblesDocumento2 páginasAnálisis de aceites vegetales comestiblesLady Millones100% (1)
- Rugosidad y Tolerancias GeometricasDocumento18 páginasRugosidad y Tolerancias GeometricasManuel GeronimoAún no hay calificaciones
- Cultura Pia-1Documento32 páginasCultura Pia-1Lino Abisai Meza IrachetaAún no hay calificaciones
- Evaluacion Del Cuidado de ManosDocumento5 páginasEvaluacion Del Cuidado de ManosAlberta Martinez Gomez100% (1)
- Te Amo Lily, y Siempre Lo HaréDocumento4 páginasTe Amo Lily, y Siempre Lo HaréLucia100% (1)
- Guía 8º 3.2 Materiales de LaboratorioDocumento9 páginasGuía 8º 3.2 Materiales de LaboratorioSamali Pinzon CorreaAún no hay calificaciones
- H. P. Lovecraft - La Maldición Que Cayó Sobre Sarnath PDFDocumento3 páginasH. P. Lovecraft - La Maldición Que Cayó Sobre Sarnath PDFSady EucedaAún no hay calificaciones
- Monitoreo Geotécnico TúnelesDocumento15 páginasMonitoreo Geotécnico TúnelesJAIME JESUS VIVANCO QUISPE100% (1)
- Template Practica FundamentosDocumento5 páginasTemplate Practica Fundamentosmatematica fisica quimica boliviaAún no hay calificaciones
- Lista Precios Sugeridos BOL FY18Documento124 páginasLista Precios Sugeridos BOL FY18Daniela RevolloAún no hay calificaciones
- Filarias: Características y ciclo biológico de las principales especies que parasitan humanosDocumento9 páginasFilarias: Características y ciclo biológico de las principales especies que parasitan humanosJosmel yañez100% (1)
- MM ConsignaciónDocumento13 páginasMM ConsignaciónRolando Moya Martinez100% (3)
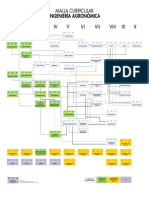
- Malla Curricular Ing Agronómica UNALDocumento1 páginaMalla Curricular Ing Agronómica UNALkmigeAún no hay calificaciones
- Tcelectronic m300 Manual PDFDocumento34 páginasTcelectronic m300 Manual PDFraultubaAún no hay calificaciones
- Climas BDocumento28 páginasClimas Balberto100% (1)
- Reactivacion Del Transporte PublicoDocumento42 páginasReactivacion Del Transporte PublicoMitchel Espinoza CárdenasAún no hay calificaciones
- Resumen Estudio y Ensayo de MaterialesDocumento19 páginasResumen Estudio y Ensayo de MaterialesMarcos Diciocco100% (1)