También podría gustarte
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Apple Iphone & Accessories PDFDocumento1 páginaApple Iphone & Accessories PDFEslam A. AliAún no hay calificaciones
- XFP 10G SM 40Km TRF7052FN (Opnext)Documento29 páginasXFP 10G SM 40Km TRF7052FN (Opnext)Ayan ChakrabortyAún no hay calificaciones
- Third Year 5 Semester Syllabus: (Applicable From The Academic Session 2018-2019)Documento23 páginasThird Year 5 Semester Syllabus: (Applicable From The Academic Session 2018-2019)Tignangshu ChatterjeeAún no hay calificaciones
- SKF Endoscopes TKES 10 Series: Instructions For UseDocumento24 páginasSKF Endoscopes TKES 10 Series: Instructions For UseRizky MuhammadAún no hay calificaciones
- GE T2100 Treadmill Service Manual Rev A.Documento152 páginasGE T2100 Treadmill Service Manual Rev A.Marckus Brody0% (1)
- Murphy Asm 160 Manual PDFDocumento4 páginasMurphy Asm 160 Manual PDFJorge Luis Cucunuba RoyeroAún no hay calificaciones
- Android WidgetsDocumento58 páginasAndroid WidgetsParas Pareek0% (1)
- Pages From PEZA Form ECE CCTV 17th FloorDocumento2 páginasPages From PEZA Form ECE CCTV 17th FloorCode JonAún no hay calificaciones
- Buku Kerja Praktikal Ej501 PW1-PW3 - JUN 2014 StudentDocumento17 páginasBuku Kerja Praktikal Ej501 PW1-PW3 - JUN 2014 StudentAL HxqAún no hay calificaciones
- NOJA-5002-08 OSM15 310, OSM27 310, OSM38 300 and RC10 Controller User Manual - Print (Adobe) PDFDocumento208 páginasNOJA-5002-08 OSM15 310, OSM27 310, OSM38 300 and RC10 Controller User Manual - Print (Adobe) PDFNhat Nguyen Van100% (1)
- 15-16 - Test 2Documento11 páginas15-16 - Test 2Rishav DugarAún no hay calificaciones
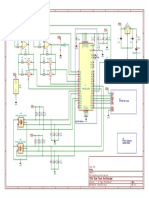
- Title: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenDocumento1 páginaTitle: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenAbdelkader Mechernene100% (2)
- Relay Settings For MotorsDocumento8 páginasRelay Settings For MotorsArvind KumawatAún no hay calificaciones
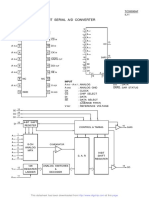
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODocumento1 páginaC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangAún no hay calificaciones
- Punit Resume WorkDocumento3 páginasPunit Resume Workapi-321948941Aún no hay calificaciones
- Toshiba 62HMX84Documento40 páginasToshiba 62HMX84Reginald SosaAún no hay calificaciones
- Chemical Technicians 10-2021Documento30 páginasChemical Technicians 10-2021PRC BaguioAún no hay calificaciones
- NTSB Panhandle Train Onboard Image Recorder ReportDocumento11 páginasNTSB Panhandle Train Onboard Image Recorder ReportRicky TreonAún no hay calificaciones
- ClimateMaster Troubleshooting Info Revised 10-04-11Documento5 páginasClimateMaster Troubleshooting Info Revised 10-04-11Daniel VeraAún no hay calificaciones
- Nortel IP PBX Basic CommandDocumento13 páginasNortel IP PBX Basic CommandPranjit KalitaAún no hay calificaciones
- Phy Ip For Pcie 3.0Documento2 páginasPhy Ip For Pcie 3.0uparashar1Aún no hay calificaciones
- Energizer E91 Max: Product DatasheetDocumento1 páginaEnergizer E91 Max: Product DatasheetVince WaldonAún no hay calificaciones
- Carte Tehnica UPS-uri Powertronix Quasar enDocumento27 páginasCarte Tehnica UPS-uri Powertronix Quasar enEnsign Budi HandokoAún no hay calificaciones
- Owned by Palred Technologies LTD Achieves Break Even On Direct Cost Basis (Company Update)Documento3 páginasOwned by Palred Technologies LTD Achieves Break Even On Direct Cost Basis (Company Update)Shyam SunderAún no hay calificaciones
- 6EP14362BA10 Datasheet enDocumento4 páginas6EP14362BA10 Datasheet enTio SAún no hay calificaciones
- The History and Development of RadioDocumento15 páginasThe History and Development of RadiowillAún no hay calificaciones
- Paper Real Time Multimedia Transcoding WP Final - RADISYSDocumento11 páginasPaper Real Time Multimedia Transcoding WP Final - RADISYSlouie mabiniAún no hay calificaciones
- OBJECTIVE TYPE QUESTIONS AND ANSWERS FOR ETO - Electro Technical OfficerDocumento39 páginasOBJECTIVE TYPE QUESTIONS AND ANSWERS FOR ETO - Electro Technical Officeramit100% (2)
- Scrolling Message Display - Project Report - Nov 15, 2011Documento71 páginasScrolling Message Display - Project Report - Nov 15, 2011Arun Arya33% (3)
- F5 Physics Chapter 4 Alfred NotesDocumento28 páginasF5 Physics Chapter 4 Alfred NotesseezhanrholAún no hay calificaciones