También podría gustarte
- Diseño de Estructuras de MamposteríaDocumento28 páginasDiseño de Estructuras de MamposteríaKevin Nuño RodriguezAún no hay calificaciones
- Aspectos Basicos de Poblacion y Muestra para La Elaboración de Proyectos (Unidad II)Documento28 páginasAspectos Basicos de Poblacion y Muestra para La Elaboración de Proyectos (Unidad II)Gabriel JonesAún no hay calificaciones
- Actividad Ejercicios Ga2-210301089-Ata8-Ev01.Documento4 páginasActividad Ejercicios Ga2-210301089-Ata8-Ev01.DANIEL CAMILO LEAL VEGA75% (4)
- Laboratorio Flujo Laminar y TurbulentoDocumento9 páginasLaboratorio Flujo Laminar y TurbulentoDilan GomezAún no hay calificaciones
- Ejercicios UT2 - Primera ParteDocumento2 páginasEjercicios UT2 - Primera ParteMarcos Martínez CánovasAún no hay calificaciones
- 02 - Gradiente GeotérmicoDocumento20 páginas02 - Gradiente GeotérmicoDiego SalvatierraAún no hay calificaciones
- Aprender en Siglo 21 TP2Documento13 páginasAprender en Siglo 21 TP2camilo bacelliAún no hay calificaciones
- Funcionamiento Del VasoDocumento19 páginasFuncionamiento Del VasoChristian CollinAún no hay calificaciones
- Madera LaminadaDocumento190 páginasMadera LaminadaJael MillanAún no hay calificaciones
- Introduccion A La ElectroterapiaDocumento4 páginasIntroduccion A La ElectroterapiaJhenyAún no hay calificaciones
- Marco TeoricoDocumento4 páginasMarco TeoricoFranklin Vargas GòmezAún no hay calificaciones
- Movimiento Uniformemente AceleradoDocumento4 páginasMovimiento Uniformemente AceleradoHarrinson Gutierrez CoronadoAún no hay calificaciones
- Taller 5. Espejos EsféricosDocumento6 páginasTaller 5. Espejos EsféricosLuciAún no hay calificaciones
- Fisica 3Documento5 páginasFisica 3Yanza GomezAún no hay calificaciones
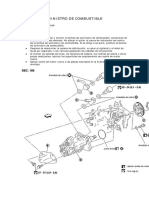
- Nissan Bomba de Suministro de CombustibleDocumento25 páginasNissan Bomba de Suministro de CombustibleIsrael TomalaAún no hay calificaciones
- Plan de Estudio Fisica 10Documento5 páginasPlan de Estudio Fisica 10Gabriel CamposAún no hay calificaciones
- Termo Unidad 2Documento31 páginasTermo Unidad 2Amairani BasultoAún no hay calificaciones
- Tablas de DepreciaciónDocumento5 páginasTablas de DepreciaciónJorge GarciaAún no hay calificaciones
- 10Documento44 páginas10Leonidas Flores PadillaAún no hay calificaciones
- La Informalidad Laboral en El Emporio Comercial Textil Gamarra 1307Documento12 páginasLa Informalidad Laboral en El Emporio Comercial Textil Gamarra 1307Flavio Paico HuamaniAún no hay calificaciones
- ¿Qué Es El Hombre en El Infinito?Documento3 páginas¿Qué Es El Hombre en El Infinito?ndoooAún no hay calificaciones
- Soluciones MFIDocumento6 páginasSoluciones MFIMarianela GambelliAún no hay calificaciones
- 24 de Marzo Del 2020 Cuadro de Doble EntradaDocumento23 páginas24 de Marzo Del 2020 Cuadro de Doble Entradasheila perezAún no hay calificaciones
- Parcial de MicroprocesadoresDocumento4 páginasParcial de MicroprocesadoresElmer Armando Mamani AbadAún no hay calificaciones
- Unidad 5 Transferencia Con Cambio de Fase.Documento1 páginaUnidad 5 Transferencia Con Cambio de Fase.Luis Reyes SimonAún no hay calificaciones
- Ejercicio Control CheckBoxDocumento5 páginasEjercicio Control CheckBoxLuis CapdevillaAún no hay calificaciones
- Matrix Metodo de 2 PuntosDocumento1 páginaMatrix Metodo de 2 Puntosbetto100% (1)
- Planilla Arranque de Chiller2Documento1 páginaPlanilla Arranque de Chiller2Franklin martinezAún no hay calificaciones
- Traducción - BSC and OrganisationalDocumento42 páginasTraducción - BSC and Organisationalleonardo jose bello martinezAún no hay calificaciones
- Tutorial Del Teorema de PitágorasDocumento5 páginasTutorial Del Teorema de PitágorasJenjen Jenny YiniAún no hay calificaciones