También podría gustarte
- Manejo de Las Herramientas de Etiquetado EnergéticoDocumento3 páginasManejo de Las Herramientas de Etiquetado EnergéticoAlejandro Aguirre Huertas50% (4)
- TERMICASDocumento27 páginasTERMICASfreddyAún no hay calificaciones
- Dialnet CeldasSolaresOrganicas 4855804Documento3 páginasDialnet CeldasSolaresOrganicas 4855804Sandyely1508Aún no hay calificaciones
- HidroelectricidadDocumento20 páginasHidroelectricidadMittRotikusAún no hay calificaciones
- CRELLODocumento2 páginasCRELLOfreddyAún no hay calificaciones
- Diagrama TrifilarDocumento1 páginaDiagrama TrifilarfreddyAún no hay calificaciones
- Poliductos EcuadorDocumento2 páginasPoliductos EcuadorfreddyAún no hay calificaciones
- Dialnet CeldasSolaresOrganicas 4855804Documento3 páginasDialnet CeldasSolaresOrganicas 4855804Sandyely1508Aún no hay calificaciones
- Dialnet CeldasSolaresOrganicas 4855804Documento3 páginasDialnet CeldasSolaresOrganicas 4855804Sandyely1508Aún no hay calificaciones
- Terminales Maritimos - Deber 3Documento1 páginaTerminales Maritimos - Deber 3freddyAún no hay calificaciones
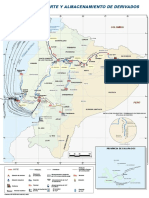
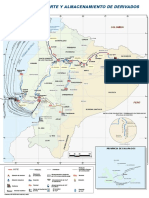
- Mapa de Transporte y Almacenamiento de DerivadosDocumento2 páginasMapa de Transporte y Almacenamiento de DerivadosfreddyAún no hay calificaciones
- Dialnet CeldasSolaresOrganicas 4855804Documento3 páginasDialnet CeldasSolaresOrganicas 4855804Sandyely1508Aún no hay calificaciones
- Mapa de Transporte y Almacenamiento de Derivados PDFDocumento1 páginaMapa de Transporte y Almacenamiento de Derivados PDFfreddyAún no hay calificaciones
- CapacidadDocumento3 páginasCapacidadfreddyAún no hay calificaciones
- CadenaDocumento11 páginasCadenafreddyAún no hay calificaciones
- ANALISISDocumento9 páginasANALISISfreddyAún no hay calificaciones
- Act Central U3Documento7 páginasAct Central U3Ivan Alonso Cordero83% (6)
- Simbologia Inst. Electricas: Area de BBQ ComedorDocumento1 páginaSimbologia Inst. Electricas: Area de BBQ ComedorfreddyAún no hay calificaciones
- Valor EsDocumento3 páginasValor EsfreddyAún no hay calificaciones
- TAREA 1 - Centrales de GeneraciónDocumento2 páginasTAREA 1 - Centrales de GeneraciónfreddyAún no hay calificaciones
- ACTIVIDADn4nnLennnnF 825ea8cc01c4369Documento4 páginasACTIVIDADn4nnLennnnF 825ea8cc01c4369freddyAún no hay calificaciones
- CadenaDocumento4 páginasCadenafreddyAún no hay calificaciones
- ACTIVIDADn4nnLennnnF 825ea8cc01c4369Documento4 páginasACTIVIDADn4nnLennnnF 825ea8cc01c4369freddyAún no hay calificaciones
- ValorDocumento2 páginasValorfreddyAún no hay calificaciones
- Centrales SolaresDocumento1 páginaCentrales SolaresfreddyAún no hay calificaciones
- Mision y Vision de CarreraDocumento1 páginaMision y Vision de CarrerafreddyAún no hay calificaciones
- CadenaDocumento4 páginasCadenafreddyAún no hay calificaciones
- CadenaDocumento4 páginasCadenafreddyAún no hay calificaciones
- Capitulo 3Documento43 páginasCapitulo 3Anonimo MatAún no hay calificaciones