También podría gustarte
- Sensores Actuadores y Sistemas de ControlDocumento36 páginasSensores Actuadores y Sistemas de Controljmbr81100% (1)
- 5 1 Electronica IndustrialDocumento7 páginas5 1 Electronica IndustrialAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Conceptos BásicosDocumento15 páginasConceptos BásicosAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Laboratorio Medidor de Intensidad LaserDocumento1 páginaLaboratorio Medidor de Intensidad LaserAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Diseños de Fuentes DCDocumento13 páginasDiseños de Fuentes DCAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Triac PDFDocumento40 páginasTriac PDFFrancisco GalleguillosAún no hay calificaciones
- Arduino Control HouseDocumento2 páginasArduino Control HouseBrandonSilverMenaAún no hay calificaciones
- WEG Arrancadores en Caja 50025828 Catalogo EspanolDocumento16 páginasWEG Arrancadores en Caja 50025828 Catalogo EspanolJoako TorresAún no hay calificaciones
- Instrumentos Virtuales PDFDocumento10 páginasInstrumentos Virtuales PDFzrtvictorAún no hay calificaciones
- IMSITEC ANTARES PresentacionDocumento26 páginasIMSITEC ANTARES PresentacionAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Cómo reparar reproductores DVD de bajo costoDocumento10 páginasCómo reparar reproductores DVD de bajo costoAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Electromagnetica PDFDocumento7 páginasElectromagnetica PDFleandroAún no hay calificaciones
- WEG Arrancadores en Caja 50025828 Catalogo EspanolDocumento16 páginasWEG Arrancadores en Caja 50025828 Catalogo EspanolJoako TorresAún no hay calificaciones
- Quiz 1Documento1 páginaQuiz 1Alvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Test Evaluacion Nivel CursoIntermedioArduino 0Documento3 páginasTest Evaluacion Nivel CursoIntermedioArduino 0José Luis Solano OspinoAún no hay calificaciones
- Taller Circuitos MixtosDocumento1 páginaTaller Circuitos MixtosAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Quiz 2Documento1 páginaQuiz 2Alvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Salud y Seguridad en El TrabajoDocumento53 páginasSalud y Seguridad en El TrabajoJohn WickAún no hay calificaciones
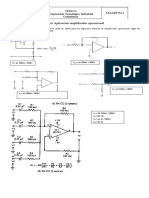
- Taller Amplificador OpDocumento1 páginaTaller Amplificador OpAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Arduino circuitos LED potenciómetro contador docenas LCDDocumento1 páginaArduino circuitos LED potenciómetro contador docenas LCDAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Quiz 1Documento1 páginaQuiz 1Alvaro Antonio Pinzón AvendañoAún no hay calificaciones
- infoPLC Net Guia2Documento16 páginasinfoPLC Net Guia2Alvaro Antonio Pinzón AvendañoAún no hay calificaciones
- 40 - 1 Capi 1Documento25 páginas40 - 1 Capi 1Ppe RbsAún no hay calificaciones
- Sensores y Autadores PDFDocumento44 páginasSensores y Autadores PDFMiguel Angel Mayma CahuaAún no hay calificaciones
- Quiz 1Documento1 páginaQuiz 1Alvaro Antonio Pinzón AvendañoAún no hay calificaciones
- (PLC Scada) - Introduccion Al ScadaDocumento30 páginas(PLC Scada) - Introduccion Al ScadaCésar AugustoAún no hay calificaciones
- Metrologia ConceptosDocumento5 páginasMetrologia ConceptosAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- LaplaceDocumento4 páginasLaplaceAlvaro Antonio Pinzón AvendañoAún no hay calificaciones
- Glosario Prevención de RiesgosDocumento11 páginasGlosario Prevención de RiesgosLeo LizamaAún no hay calificaciones