También podría gustarte
- Torno Mecánico Basic Plus - Torneado, Roscado y Más por €5,200Documento2 páginasTorno Mecánico Basic Plus - Torneado, Roscado y Más por €5,200Gonzalo SilvaAún no hay calificaciones
- Calculo CorreasDocumento13 páginasCalculo CorreasfrbadillaAún no hay calificaciones
- Sin Fin y Corona Formulas Procedimientos y Ejemplos PDFDocumento7 páginasSin Fin y Corona Formulas Procedimientos y Ejemplos PDFDiego RiveraAún no hay calificaciones
- Diseño de Poleas para Fajas en VDocumento12 páginasDiseño de Poleas para Fajas en VJosias Velasquez CotradoAún no hay calificaciones
- Cálculo de engranajes cónicos rectos estándarDocumento1 páginaCálculo de engranajes cónicos rectos estándardeliaabreguAún no hay calificaciones
- Sistemas de Transmisión MecánicaDocumento27 páginasSistemas de Transmisión MecánicaEduardo Alex Eugenio MendezAún no hay calificaciones
- RUEDAS NEUMATICAS Y LLANTAS DE CHAPADocumento27 páginasRUEDAS NEUMATICAS Y LLANTAS DE CHAPAtestavalentinAún no hay calificaciones
- Elementos de máquina: engranajes cónicos e hipoidesDocumento23 páginasElementos de máquina: engranajes cónicos e hipoidesGerbercp Condori Palacios50% (4)
- Vida HerramientasHerramientasDocumento42 páginasVida HerramientasHerramientascarmelotomas100% (3)
- Gave Multibloc 099ca00564.02esDocumento8 páginasGave Multibloc 099ca00564.02esjavivi_75Aún no hay calificaciones
- Tabla de Engranajes Norma Agma 2016Documento19 páginasTabla de Engranajes Norma Agma 2016Luis Frank NB100% (1)
- Mecanizado de engrane helicoidal en tornoDocumento2 páginasMecanizado de engrane helicoidal en tornoPedro Quintero100% (1)
- Diseño de conductos de ventilación localizada (SVLEDocumento66 páginasDiseño de conductos de ventilación localizada (SVLEraul bizzottoAún no hay calificaciones
- Lección 1Documento9 páginasLección 1Joel EspinAún no hay calificaciones
- Hoja de Procesos FinalizadoDocumento27 páginasHoja de Procesos FinalizadoGary TitoAún no hay calificaciones
- Tensor de PoleasDocumento11 páginasTensor de PoleasDickter Alberto Zarpan VasquezAún no hay calificaciones
- CALCULOS Ejes EstriadosDocumento61 páginasCALCULOS Ejes EstriadosMANUEL PERAZA100% (2)
- Calculador de EngranajesDocumento1 páginaCalculador de EngranajesHERNANAún no hay calificaciones
- Gusano TransportadorDocumento76 páginasGusano TransportadorDiego Barrios QuintanillaAún no hay calificaciones
- Engranajes helicoidales transmiten potenciaDocumento5 páginasEngranajes helicoidales transmiten potenciaAlberto Salas MongesAún no hay calificaciones
- Calculo Engranajes Dientes RectosDocumento22 páginasCalculo Engranajes Dientes Rectoscabezon3Aún no hay calificaciones
- Diseno PresentacionDocumento21 páginasDiseno PresentacionJonathan Pulluquitin AnguloAún no hay calificaciones
- Cálculo de EngranajesDocumento34 páginasCálculo de EngranajesRodrigo SilvaAún no hay calificaciones
- Ángulo ruedas vehículo relación desmultiplicaciónDocumento5 páginasÁngulo ruedas vehículo relación desmultiplicaciónRonald100% (1)
- Formulas HidraulicasDocumento3 páginasFormulas HidraulicasMelgar Segundo Paredes Paredes0% (1)
- Tema 4 Diseño de Sujetadores RoscadosDocumento15 páginasTema 4 Diseño de Sujetadores RoscadosMoises MartinezAún no hay calificaciones
- Diseno de Un EjeDocumento17 páginasDiseno de Un EjeClifor Huaracha quispeAún no hay calificaciones
- Ejercicio Combinados de MecanizadosDocumento8 páginasEjercicio Combinados de MecanizadosLaura Emperatriz Coque GallegosAún no hay calificaciones
- C-Lculo de Helicoidales Ejes ParalelosDocumento8 páginasC-Lculo de Helicoidales Ejes ParaleloseforondaoAún no hay calificaciones
- Examen 1Documento1 páginaExamen 1ANDRES ANTHONY ACOSTA ALVITRESAún no hay calificaciones
- Cálculos de Esfuerzos en El Mecanismo de La Mesa de Trabajo (19!07!16)Documento1 páginaCálculos de Esfuerzos en El Mecanismo de La Mesa de Trabajo (19!07!16)Ing. Eliézer MartínezAún no hay calificaciones
- c08 Plano de Ensamblaje DmacDocumento18 páginasc08 Plano de Ensamblaje DmacDavid CristhianAún no hay calificaciones
- Cuchilla 1-Análisis Estático 2-1Documento12 páginasCuchilla 1-Análisis Estático 2-1rcarlos_810803Aún no hay calificaciones
- Calculo de Cilindros NeumaticosDocumento9 páginasCalculo de Cilindros NeumaticosJoelAún no hay calificaciones
- Informe de ResorteDocumento7 páginasInforme de ResorteGabriel Omar Bautista SangaAún no hay calificaciones
- Calculo de Corona Sin Fin de Doble EntradaDocumento24 páginasCalculo de Corona Sin Fin de Doble EntradaJesus CesarAún no hay calificaciones
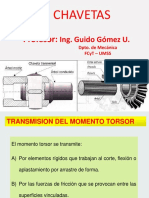
- Capvi. - Chavetas3 PDFDocumento47 páginasCapvi. - Chavetas3 PDFFabian Marca ColqueAún no hay calificaciones
- 5 Cálculos Pples en TroquelesDocumento33 páginas5 Cálculos Pples en TroquelesfelipeAún no hay calificaciones
- Aceros para EngranajesDocumento11 páginasAceros para EngranajesMauri Alvarez100% (1)
- Cojinetes de Contacto RodanteDocumento38 páginasCojinetes de Contacto RodanteAlejandro YugchaAún no hay calificaciones
- CangilonesDocumento8 páginasCangilonesJohnny ValenciaAún no hay calificaciones
- Bombas de Paletas DeslizantesDocumento5 páginasBombas de Paletas DeslizantesUziel HernandezAún no hay calificaciones
- Fundicion Informe COMPLETODocumento29 páginasFundicion Informe COMPLETOROMEL VALQUI RAMIREZAún no hay calificaciones
- Tema I Esquemas CinematicosDocumento14 páginasTema I Esquemas CinematicosJosé María Flores RojasAún no hay calificaciones
- Calculo de Engranajes Conicos Rectos Standard 30-72 DientesDocumento1 páginaCalculo de Engranajes Conicos Rectos Standard 30-72 DientesCarlosAún no hay calificaciones
- Proceso de fabricación de piezas troqueladas en aceroDocumento14 páginasProceso de fabricación de piezas troqueladas en aceroRogerd GonzálezAún no hay calificaciones
- CHAVETASDocumento12 páginasCHAVETASSteeven Tutivén MoránAún no hay calificaciones
- CM C1 Reporte1Documento15 páginasCM C1 Reporte1Daniel DiazAún no hay calificaciones
- CAINE ALUMINIO Guia-Practica-Para-El-Diseno-De-Mazarotas-Y-EnfriadoresDocumento7 páginasCAINE ALUMINIO Guia-Practica-Para-El-Diseno-De-Mazarotas-Y-EnfriadoresJoslugar AhoraAún no hay calificaciones
- Calculo de Fuerzas en Poleas Correas y Cadenas PiñonesDocumento15 páginasCalculo de Fuerzas en Poleas Correas y Cadenas Piñonesjulian david cantor castelblancoAún no hay calificaciones
- XYZ Catalogo UtillajesDocumento6 páginasXYZ Catalogo UtillajesXabier ZarrandicoecheaAún no hay calificaciones
- Selección de Lubricante para ReductoresDocumento23 páginasSelección de Lubricante para ReductoresJavier FernándezAún no hay calificaciones
- Funcionamiento Bomba AdiabaticaDocumento2 páginasFuncionamiento Bomba AdiabaticaRodrigo SalinasAún no hay calificaciones
- Elementos Mecanicos TPMDocumento78 páginasElementos Mecanicos TPMjuan pablo araizaAún no hay calificaciones
- PoleasDocumento15 páginasPoleasmariocesar123Aún no hay calificaciones
- Tallado de EngranajesDocumento13 páginasTallado de EngranajesRamírez Vilca JulioAún no hay calificaciones
- Tornillos de PotenciaDocumento16 páginasTornillos de PotenciaDenis MendozaAún no hay calificaciones
- 01 - Gears 01Documento58 páginas01 - Gears 01Andres Felipe Gil FrancoAún no hay calificaciones
- Ingeniería de ProyectosDocumento73 páginasIngeniería de ProyectosMateo Sepulveda SanchezAún no hay calificaciones
- 5.1 Estudio Economico y FinancieroDocumento17 páginas5.1 Estudio Economico y FinancieroMateo Sepulveda SanchezAún no hay calificaciones
- Tamaño Del ProyectoDocumento19 páginasTamaño Del ProyectoMateo Sepulveda SanchezAún no hay calificaciones
- Competencias LaboralesDocumento12 páginasCompetencias LaboralesMateo Sepulveda SanchezAún no hay calificaciones
- ComunicaciónDocumento11 páginasComunicaciónMateo Sepulveda SanchezAún no hay calificaciones
- OrganizaciónDocumento23 páginasOrganizaciónMateo Sepulveda SanchezAún no hay calificaciones
- InventariosDocumento25 páginasInventariosMateo Sepulveda SanchezAún no hay calificaciones
- Mandamientos Del LiderazgoDocumento1 páginaMandamientos Del LiderazgoMateo Sepulveda SanchezAún no hay calificaciones
- MotivaciónDocumento21 páginasMotivaciónMateo Sepulveda SanchezAún no hay calificaciones
- LiderazgoDocumento18 páginasLiderazgoMateo Sepulveda SanchezAún no hay calificaciones
- DirecciónDocumento4 páginasDirecciónMateo Sepulveda SanchezAún no hay calificaciones
- MotivaciónDocumento21 páginasMotivaciónMateo Sepulveda SanchezAún no hay calificaciones
- Vasos y CopasDocumento9 páginasVasos y CopasMateo Sepulveda SanchezAún no hay calificaciones
- Trabajo en EquipoDocumento17 páginasTrabajo en EquipoMateo Sepulveda SanchezAún no hay calificaciones
- Adminsitración de Los RRHHDocumento25 páginasAdminsitración de Los RRHHMateo Sepulveda SanchezAún no hay calificaciones
- Juanta Piso PistonDocumento1 páginaJuanta Piso PistonMateo Sepulveda SanchezAún no hay calificaciones
- 2015-Cómo Redactar Un Curriculum VitaeDocumento2 páginas2015-Cómo Redactar Un Curriculum VitaeJeronimo JuearezAún no hay calificaciones
- OrganizaciónDocumento23 páginasOrganizaciónMateo Sepulveda SanchezAún no hay calificaciones
- Anexo E2 - Bases de Cálculos de TuberíasDocumento34 páginasAnexo E2 - Bases de Cálculos de TuberíasEstefanie Charlotte PortilloAún no hay calificaciones
- Calibracion de ManometrosDocumento5 páginasCalibracion de ManometrosMateo Sepulveda SanchezAún no hay calificaciones
- Protocolo de NogociosDocumento5 páginasProtocolo de NogociosMateo Sepulveda SanchezAún no hay calificaciones
- ControlDocumento12 páginasControlMateo Sepulveda SanchezAún no hay calificaciones
- Simbologia Neumatica e Hidraulica PDFDocumento10 páginasSimbologia Neumatica e Hidraulica PDFElvis Justo Choquegonza GomezAún no hay calificaciones
- Trabajo en EquipoDocumento17 páginasTrabajo en EquipoMateo Sepulveda SanchezAún no hay calificaciones
- Taller de Repaso para El ParcialDocumento4 páginasTaller de Repaso para El ParcialMateo Sepulveda SanchezAún no hay calificaciones
- Datasheed CilindroDocumento2 páginasDatasheed CilindroMateo Sepulveda SanchezAún no hay calificaciones
- Deducción de la Ecuación General de Calor por Conducción en Coordenadas Rectangulares y CurvilíneasDocumento14 páginasDeducción de la Ecuación General de Calor por Conducción en Coordenadas Rectangulares y CurvilíneasanaaAún no hay calificaciones
- Memoria de Calculo Cortadora de GuaduaDocumento9 páginasMemoria de Calculo Cortadora de GuaduaMateo Sepulveda SanchezAún no hay calificaciones
- Tablas AcerosDocumento2 páginasTablas AcerosMateo Sepulveda SanchezAún no hay calificaciones
- Laboratorio 08 - Mando FinalDocumento5 páginasLaboratorio 08 - Mando FinalEvert Eddy Maquera UrdaniviaAún no hay calificaciones
- Armado e Instalación Del Piñón Impulsor de La BombaDocumento3 páginasArmado e Instalación Del Piñón Impulsor de La BombaalexAún no hay calificaciones
- DiferencialesDocumento54 páginasDiferencialesPuti Benny Lakra0% (1)
- Análisis de Engranes-1Documento18 páginasAnálisis de Engranes-1Alejandra Cad'sAún no hay calificaciones
- Calculos Alex JavierDocumento6 páginasCalculos Alex Javieralex caizaAún no hay calificaciones
- Grupos reductores y diferencialesDocumento86 páginasGrupos reductores y diferencialesamericoAún no hay calificaciones
- Boxer Bm100Documento71 páginasBoxer Bm100Jorge Luis Ramos100% (1)
- Engranes y transmisión de movimientoDocumento26 páginasEngranes y transmisión de movimientoRODRIGO SANCHEZ MORENOAún no hay calificaciones
- Engranajes Cilindricos RectosDocumento64 páginasEngranajes Cilindricos RectosRoger Milla GranadosAún no hay calificaciones
- Taller de MecanismosDocumento2 páginasTaller de MecanismosJohanna SanabriaAún no hay calificaciones
- Plataforma Serie 600Documento260 páginasPlataforma Serie 600Gilberto Teles100% (1)
- MR 04 Daily CAJA DE VELOCIDADES PDFDocumento36 páginasMR 04 Daily CAJA DE VELOCIDADES PDFpastor4100% (1)
- EngranajesDocumento24 páginasEngranajesMarioAún no hay calificaciones
- Calculo engranajes helicoidales ejes perpendiculares y paralelosDocumento8 páginasCalculo engranajes helicoidales ejes perpendiculares y paralelosLuis NuelaAún no hay calificaciones
- Tornillo sin fin: Cálculos y dimensionesDocumento4 páginasTornillo sin fin: Cálculos y dimensionesrichard13mayorgaAún no hay calificaciones
- Diseño y cálculo de engranaje recto de 31 dientes y 1.5 de móduloDocumento8 páginasDiseño y cálculo de engranaje recto de 31 dientes y 1.5 de módulogiovanny alvaradoAún no hay calificaciones
- Transmisiones de MovimientoDocumento16 páginasTransmisiones de MovimientodrzttAún no hay calificaciones
- EngranajesDocumento30 páginasEngranajesFelipe EscobarAún no hay calificaciones
- Índice de Estándares y Hojas de Información de AGMA Por TemaDocumento4 páginasÍndice de Estándares y Hojas de Información de AGMA Por Temaporfirio ruiz100% (1)
- Ejercicios Engranajes 3º Eso Hoja 1Documento2 páginasEjercicios Engranajes 3º Eso Hoja 1http://elmaquinista.foroargentina.net/forumAún no hay calificaciones
- 2 Caja de Cambios MecánicaDocumento15 páginas2 Caja de Cambios MecánicaSantos Bocanegra Zavala100% (1)
- Esfuerzos Engranajes RectosDocumento4 páginasEsfuerzos Engranajes RectosHarrison FloresAún no hay calificaciones
- 4139 068 324 5HP 600 EurocolDocumento79 páginas4139 068 324 5HP 600 Eurocolrinho2013Aún no hay calificaciones
- Calculo de Fuerzas en Poleas Correas y Cadenas PiñonesDocumento15 páginasCalculo de Fuerzas en Poleas Correas y Cadenas Piñonesjulian david cantor castelblancoAún no hay calificaciones
- Rubrica de DiseñoDocumento44 páginasRubrica de DiseñoPablo Cabrera MaresAún no hay calificaciones
- Examenes EngranajeDocumento12 páginasExamenes EngranajePaolo Bardales DiazAún no hay calificaciones
- Guía-3 Tipos de EngranajesDocumento2 páginasGuía-3 Tipos de EngranajesMarco VelvelAún no hay calificaciones
- Lab.3 Tren de Fuerza Dumas B PDFDocumento13 páginasLab.3 Tren de Fuerza Dumas B PDFAnonymous BIjGW6Aún no hay calificaciones
- BLUMAQ Watermark PDFDocumento88 páginasBLUMAQ Watermark PDFAlfredo TarAún no hay calificaciones