También podría gustarte
- Dolchstoßlegende: Discurso Político de en La Tribuna de La Plaza de en Mayo de 1930Documento8 páginasDolchstoßlegende: Discurso Político de en La Tribuna de La Plaza de en Mayo de 1930OSCAR GALVISAún no hay calificaciones
- Polarización: EditarDocumento5 páginasPolarización: EditarOSCAR GALVISAún no hay calificaciones
- Segunda Guerra Mundial: Ir A La Navegación Ir A La BúsquedaDocumento9 páginasSegunda Guerra Mundial: Ir A La Navegación Ir A La BúsquedaOSCAR GALVISAún no hay calificaciones
- Radar: para Otros Usos de Este Término, VéaseDocumento6 páginasRadar: para Otros Usos de Este Término, VéaseOSCAR GALVISAún no hay calificaciones
- Ejercicio de Nivelacion Control InternoDocumento11 páginasEjercicio de Nivelacion Control InternoAris Arturo Córdova CamposAún no hay calificaciones
- ProtozooDocumento5 páginasProtozooErik Solano HernándezAún no hay calificaciones
- 2008 Mpodozisy Ramos RAGADocumento18 páginas2008 Mpodozisy Ramos RAGAAliocha BouldresAún no hay calificaciones
- Diapositivas de Libros ContablesDocumento30 páginasDiapositivas de Libros ContablesLuis Fernando Ardila Luna100% (3)
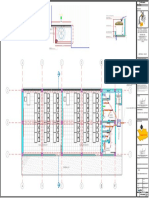
- Hidrosanitario Aulas-Inst-Aul-01aDocumento1 páginaHidrosanitario Aulas-Inst-Aul-01aFredy PereaAún no hay calificaciones
- Diseño de Rocoto 5.corregidodocDocumento75 páginasDiseño de Rocoto 5.corregidodocMilenita BMAún no hay calificaciones
- Dedicatoria para Tesis o Trabajo DirigidoDocumento3 páginasDedicatoria para Tesis o Trabajo DirigidoAnniSu DrgttAún no hay calificaciones
- Marina Perez Rep DominicanaDocumento38 páginasMarina Perez Rep DominicanaSKarolina CMorenoAún no hay calificaciones
- Develando Los Misterios de La AntartidaDocumento11 páginasDevelando Los Misterios de La AntartidalpinargotiAún no hay calificaciones
- Rusia de Las Reformas de Pedro El Grande A Catalina La GrandeDocumento36 páginasRusia de Las Reformas de Pedro El Grande A Catalina La GrandeWTC Control - Sebastián AguileraAún no hay calificaciones
- Sistema DigestivoDocumento12 páginasSistema DigestivoLilian CordónAún no hay calificaciones
- Trabajo 01 Grupo 5 Administración FinancieraDocumento9 páginasTrabajo 01 Grupo 5 Administración FinancieraJean Pier IzarraAún no hay calificaciones
- 1959 Lourdes Díaz-Trechuelo - Arquitectura Española en Filipinas (1565-1800) OkDocumento781 páginas1959 Lourdes Díaz-Trechuelo - Arquitectura Española en Filipinas (1565-1800) OkEsteban Fernández-Cobián100% (1)
- PX1 80Documento4 páginasPX1 80Juan Pablo Villouta GutierrezAún no hay calificaciones
- CV Leonardo Manuel Alvarez 2022Documento3 páginasCV Leonardo Manuel Alvarez 2022Leonardo Manuel AlvarezAún no hay calificaciones
- Artículo CientíficoDocumento22 páginasArtículo CientíficoAlexis Gianfranko Romero LeonAún no hay calificaciones
- Pautas Asignatura Informatica IDocumento17 páginasPautas Asignatura Informatica IHerminio SalgueiroAún no hay calificaciones
- Preguntas Carreteras IIIDocumento28 páginasPreguntas Carreteras IIIBeymar Quispe100% (1)
- La Influencia de La Cultura y Las Identidades en Las Relaciones InterculturalesDocumento4 páginasLa Influencia de La Cultura y Las Identidades en Las Relaciones InterculturalesYulibeth Paternina GonzálezAún no hay calificaciones
- Informe Plan de Defensa NacionalDocumento6 páginasInforme Plan de Defensa NacionalRay RamosAún no hay calificaciones
- Capítulo3Estad IDocumento12 páginasCapítulo3Estad IJuan MassAún no hay calificaciones
- Investigar Sobre El Caso Seguro ConstituciónDocumento5 páginasInvestigar Sobre El Caso Seguro ConstituciónJose AlcantaraAún no hay calificaciones
- LA NIÑA NUEVA - ArianaDocumento4 páginasLA NIÑA NUEVA - ArianaNelson Enrique Javier AnguloAún no hay calificaciones
- Tarea-3-Fundamentos Filosoficos de La EducacionDocumento4 páginasTarea-3-Fundamentos Filosoficos de La EducacionPAMELA GARCIAAún no hay calificaciones
- Examen Extraordinario Rene VargasDocumento3 páginasExamen Extraordinario Rene VargasRené VargasAún no hay calificaciones
- Memoria DescriptivaDocumento4 páginasMemoria DescriptivaPaola Enriquez CruzaleguiAún no hay calificaciones
- Unix VS WindowsDocumento6 páginasUnix VS WindowsPamela AlarconAún no hay calificaciones
- Informe Canasta JunioDocumento10 páginasInforme Canasta JunioBlanco Sobre NegroAún no hay calificaciones
- Choice Miembro InferiorDocumento2 páginasChoice Miembro Inferiorkingairlv123Aún no hay calificaciones
- Biología 4Documento62 páginasBiología 4angel2 beltranAún no hay calificaciones