También podría gustarte
- Universidad Técnica de Ambato Facultad de Ingeniería Civil Y Mecánica Ficha - Reporte Ensayo MTDocumento7 páginasUniversidad Técnica de Ambato Facultad de Ingeniería Civil Y Mecánica Ficha - Reporte Ensayo MTLily AmayaAún no hay calificaciones
- ParabolicosDocumento5 páginasParabolicosLily AmayaAún no hay calificaciones
- 2 2 PDFDocumento5 páginas2 2 PDFLily AmayaAún no hay calificaciones
- 2 PDFDocumento5 páginas2 PDFLily AmayaAún no hay calificaciones
- ReviewDocumento1 páginaReviewLily AmayaAún no hay calificaciones
- InterpolaciónDocumento2 páginasInterpolaciónLily AmayaAún no hay calificaciones
- Universidad Técnica de AmbatoDocumento22 páginasUniversidad Técnica de AmbatoLily AmayaAún no hay calificaciones
- N ° Discontinuid Ad Coordenadas de Ubicación) Diámetro Con Tinta Fluorescente (MM) Resultados Código para Evaluar ASME Sección 8 X Y 1Documento5 páginasN ° Discontinuid Ad Coordenadas de Ubicación) Diámetro Con Tinta Fluorescente (MM) Resultados Código para Evaluar ASME Sección 8 X Y 1Lily AmayaAún no hay calificaciones
- Parte 2Documento3 páginasParte 2Lily AmayaAún no hay calificaciones
- Ingeniría de Manufactura PDFDocumento23 páginasIngeniría de Manufactura PDFLily AmayaAún no hay calificaciones
- Programacion LinealDocumento52 páginasProgramacion LinealLily AmayaAún no hay calificaciones
- Revista Integracion y Comercio 42 PDFDocumento173 páginasRevista Integracion y Comercio 42 PDFFabian VillotaAún no hay calificaciones
- Parte 2Documento2 páginasParte 2Lily AmayaAún no hay calificaciones
- Caracteristicas Tecnicas CostosDocumento16 páginasCaracteristicas Tecnicas CostosLily AmayaAún no hay calificaciones
- BPH y BPMDocumento2 páginasBPH y BPMXiomara Calle Ramirez73% (11)
- Figura 1: Calderín de 2 BHP Fuente: AutoresDocumento3 páginasFigura 1: Calderín de 2 BHP Fuente: AutoresLily AmayaAún no hay calificaciones
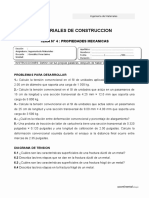
- Guia 1Documento5 páginasGuia 1Lily AmayaAún no hay calificaciones
- Calculo DisponibilidadDocumento2 páginasCalculo DisponibilidadLily AmayaAún no hay calificaciones
- Conexión A TierraDocumento8 páginasConexión A TierraLily AmayaAún no hay calificaciones
- Programacion LinealDocumento52 páginasProgramacion LinealLily AmayaAún no hay calificaciones
- 0000000484cnt 2013 08 Modelo Acta CompromisoDocumento1 página0000000484cnt 2013 08 Modelo Acta CompromisoLily AmayaAún no hay calificaciones
- 2013 08 23 Modelo Acta CompromisoDocumento1 página2013 08 23 Modelo Acta CompromisoSinclair GuzmánAún no hay calificaciones
- Contaminacion Del SueloDocumento7 páginasContaminacion Del SueloLily AmayaAún no hay calificaciones
- Asentamiento en SuelosDocumento14 páginasAsentamiento en SuelosDeyanira Navarro AtocheAún no hay calificaciones
- Tema 1 Parte 2 CAPACIDAD DE SOPORTE DE LOS SUELOS Y ASENTAMIENTOSDocumento45 páginasTema 1 Parte 2 CAPACIDAD DE SOPORTE DE LOS SUELOS Y ASENTAMIENTOSPamela YucraAún no hay calificaciones
- 02 Esfuerzos PDFDocumento25 páginas02 Esfuerzos PDFムリーリョベラスケスローニAún no hay calificaciones
- Ley de HookeDocumento5 páginasLey de HookeYanier RuizAún no hay calificaciones
- Ficha Articulo 2 Analisis de DesgasteDocumento4 páginasFicha Articulo 2 Analisis de Desgasteabi.xime2020Aún no hay calificaciones
- Wa0001Documento138 páginasWa0001EVER VASQUEZ MARINAún no hay calificaciones
- Preesfuerzo CircunferencialDocumento6 páginasPreesfuerzo CircunferencialCelier Diaz EspinozaAún no hay calificaciones
- 04 Practica - Propiedades MecanicasDocumento2 páginas04 Practica - Propiedades MecanicasJerold LuisAún no hay calificaciones
- Conexion Columna IRDocumento21 páginasConexion Columna IRcezapeAún no hay calificaciones
- Reología polímeros flujoDocumento73 páginasReología polímeros flujosecundaria92Aún no hay calificaciones
- Qué factores determinan la resistencia mecánica del plásticoDocumento9 páginasQué factores determinan la resistencia mecánica del plásticoluciaAún no hay calificaciones
- Introduccion Al Analisis de Vibraciones MecanicasDocumento24 páginasIntroduccion Al Analisis de Vibraciones MecanicasFranklin Argandoña PérezAún no hay calificaciones
- Pieza1 Análisis Estático 1 1Documento17 páginasPieza1 Análisis Estático 1 1ANDRES FABIAN BONILLA FERNANDEZAún no hay calificaciones
- Asentamientos Parte 1v1okDocumento20 páginasAsentamientos Parte 1v1okPedro Albeiro Jojoa HernandezAún no hay calificaciones
- Ecuaciones Constitutivas (Unidad 5)Documento15 páginasEcuaciones Constitutivas (Unidad 5)Angel ColliAún no hay calificaciones
- ELASTICIDADDocumento5 páginasELASTICIDADJhismer50% (2)
- Fuerza Norma - Carga AxialDocumento4 páginasFuerza Norma - Carga AxialAlex GonzalesAún no hay calificaciones
- Apunte Teórico - Parte 1Documento24 páginasApunte Teórico - Parte 1alexisAún no hay calificaciones
- Aplicaciones de Las Ecuaciones DiferencialesDocumento40 páginasAplicaciones de Las Ecuaciones DiferencialesAMYNNXXXX81% (21)
- Cap1 Elasticidad MEJORADO SA1809212316Documento20 páginasCap1 Elasticidad MEJORADO SA1809212316Manchas BotAún no hay calificaciones
- Losa MetaldeckDocumento10 páginasLosa MetaldeckEstructura IngenierosAún no hay calificaciones
- Reporte 7 - 1965582Documento14 páginasReporte 7 - 1965582fernandaAún no hay calificaciones
- Unidad 5 Estabilidad de PresasDocumento9 páginasUnidad 5 Estabilidad de Presaslourdes mendozaAún no hay calificaciones
- Fuerza 2Documento6 páginasFuerza 2Marcela Loreto PereiraAún no hay calificaciones
- Marco Teorico - TorsiónDocumento3 páginasMarco Teorico - TorsiónFabian Salazar100% (2)
- Métodos de Trabajo y Energía para El Cálculo de Las DeflexionesDocumento12 páginasMétodos de Trabajo y Energía para El Cálculo de Las DeflexionesMadahí José SegundoAún no hay calificaciones
- Fundamentos de Dinámica de Suelos PDFDocumento15 páginasFundamentos de Dinámica de Suelos PDFAllen MorrowAún no hay calificaciones
- La Tierra Como Solido ElasticoDocumento12 páginasLa Tierra Como Solido ElasticoRubenCordobaAún no hay calificaciones
- 5.2. Aplicaciones A Problemas de Elasticidad, 5.3. Ecuaciones de Navier - Cauchy, 5.4.ecuacion de Navier - Stokes - (Equipo 4)Documento20 páginas5.2. Aplicaciones A Problemas de Elasticidad, 5.3. Ecuaciones de Navier - Cauchy, 5.4.ecuacion de Navier - Stokes - (Equipo 4)dani perezAún no hay calificaciones
- COLD-ForMED STEEL N5. Resistencia Por Cargas Concéntricas de Secciones Tubulares. AISI S100-07Documento12 páginasCOLD-ForMED STEEL N5. Resistencia Por Cargas Concéntricas de Secciones Tubulares. AISI S100-07Angel ManriqueAún no hay calificaciones