También podría gustarte
- Ejercicio 1 - SimulaciónDocumento4 páginasEjercicio 1 - SimulaciónAndy FloresAún no hay calificaciones
- Practica No 4 Diseño ControladoresDocumento9 páginasPractica No 4 Diseño ControladoresFaustoVinicioAcuñaCoelloAún no hay calificaciones
- Control de procesos SimulinkDocumento4 páginasControl de procesos Simulinkchau_riberAún no hay calificaciones
- Modelado Bola BarraDocumento22 páginasModelado Bola BarraJosé Victor Zaconeta FloresAún no hay calificaciones
- Análisis del comportamiento de un péndulo simple mediante simulación en MatlabDocumento11 páginasAnálisis del comportamiento de un péndulo simple mediante simulación en MatlabAntonio Cordero DelgadoAún no hay calificaciones
- Ejercicios Controladores PidDocumento71 páginasEjercicios Controladores PidJosue Tuz Poot100% (2)
- Control DigitalDocumento11 páginasControl Digitaljorge roblesAún no hay calificaciones
- Sec p4 Levitador Magnetico 1314a-5203Documento7 páginasSec p4 Levitador Magnetico 1314a-5203Adriana Yoselin Montero MendezAún no hay calificaciones
- Análisis de Posición Del Mecanismo de Biela-Manivela-CorrederaDocumento9 páginasAnálisis de Posición Del Mecanismo de Biela-Manivela-CorrederaAlex L. Puerto100% (3)
- Modelado de Un PénduloDocumento5 páginasModelado de Un PénduloReNé ShunAún no hay calificaciones
- Controladores DigitalesDocumento10 páginasControladores DigitalesPako AlbAún no hay calificaciones
- Aviones PitchDocumento82 páginasAviones PitchjuniorAún no hay calificaciones
- 203041A 764 Fase2 "Consolidado"Documento17 páginas203041A 764 Fase2 "Consolidado"Esneyder QuevedoAún no hay calificaciones
- Ejercicios Controladores PidDocumento70 páginasEjercicios Controladores PidJulita Nelson GordonAún no hay calificaciones
- Ejercicios de Modelado en MatlabDocumento37 páginasEjercicios de Modelado en MatlabWilliam RoaAún no hay calificaciones
- Sistemas No Lineales y Modelos Linealizados.Documento6 páginasSistemas No Lineales y Modelos Linealizados.maleniAún no hay calificaciones
- MT221 Unidad 5 Sintonía de Controladores PIDDocumento48 páginasMT221 Unidad 5 Sintonía de Controladores PIDDelmer Sanchez PerezAún no hay calificaciones
- Modelar Una Curva de Reaccion de Un ProcesoDocumento13 páginasModelar Una Curva de Reaccion de Un ProcesoMaritza SalgueroAún no hay calificaciones
- Modelo Matematico DiscretoDocumento17 páginasModelo Matematico DiscretoRonyVargasAún no hay calificaciones
- Leyes de ControlDocumento7 páginasLeyes de Controljuancampos45Aún no hay calificaciones
- Leyes de Control PDFDocumento7 páginasLeyes de Control PDFjuancampos45Aún no hay calificaciones
- Control Digital Con MatlabDocumento10 páginasControl Digital Con Matlabdavid9_zld4754Aún no hay calificaciones
- Informe Del 2Documento7 páginasInforme Del 2Alejandro Tello VargasAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Control Ejercicios de PidDocumento66 páginasControl Ejercicios de PidMundoPic MundoPicAún no hay calificaciones
- Lab 0 y 1 Control Moderno Fim Uni 2019 IiDocumento6 páginasLab 0 y 1 Control Moderno Fim Uni 2019 Iisebas zamataAún no hay calificaciones
- Lab 1 - ControlDocumento17 páginasLab 1 - ControlSergio Ccahuana GiraudAún no hay calificaciones
- Simulación y control difuso del péndulo invertidoDocumento9 páginasSimulación y control difuso del péndulo invertidooscarlalilagosAún no hay calificaciones
- Tif - Control 2 - Entrega FinalDocumento11 páginasTif - Control 2 - Entrega FinalWillian CcahuanaAún no hay calificaciones
- CeduvirtSimulink PDFDocumento33 páginasCeduvirtSimulink PDFArturo RawrAún no hay calificaciones
- Modelado y Simulación de Sistemas de Control en MATLABDocumento9 páginasModelado y Simulación de Sistemas de Control en MATLABjuan carlos revillaAún no hay calificaciones
- SimulinkDocumento12 páginasSimulinkJeanpBalbinAún no hay calificaciones
- Lugar Ra Ices Diagram AbodeDocumento14 páginasLugar Ra Ices Diagram Abodemiloamaya1993Aún no hay calificaciones
- Respuestas de sistemas ante entrada escalónDocumento9 páginasRespuestas de sistemas ante entrada escalónLeandro SanchezAún no hay calificaciones
- CTM Ejemplo - Péndulo Invertido - Modelación PDFDocumento8 páginasCTM Ejemplo - Péndulo Invertido - Modelación PDFWilson Barco MAún no hay calificaciones
- Discretización de Controladores de Tiempo ContinuoDocumento4 páginasDiscretización de Controladores de Tiempo ContinuoLeonardo RadaAún no hay calificaciones
- Practica 4Documento6 páginasPractica 4paula rodriguez carreroAún no hay calificaciones
- Scilab control sistemas modelo transferencia estabilidadDocumento6 páginasScilab control sistemas modelo transferencia estabilidadAizprua LuisAún no hay calificaciones
- Aspectos Avanzados Simulink y MatlabDocumento13 páginasAspectos Avanzados Simulink y MatlabCarlos Oporto AñacatoAún no hay calificaciones
- Control VTOL SISODocumento22 páginasControl VTOL SISOJason GreenAún no hay calificaciones
- SPC3_EE649M _2020_2 (1)Documento5 páginasSPC3_EE649M _2020_2 (1)Ailen StewartAún no hay calificaciones
- Ejercicios Teoria de ControlDocumento29 páginasEjercicios Teoria de ControlJuan PlazaAún no hay calificaciones
- 1ra Simulacion - Cruise Control - AvanceDocumento56 páginas1ra Simulacion - Cruise Control - AvanceGianfranco Villanueva Diaz100% (2)
- Actividades A Desarrollar-Fase 1Documento10 páginasActividades A Desarrollar-Fase 1erick DHozAún no hay calificaciones
- 08 Reporte, Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenDocumento23 páginas08 Reporte, Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenFernando AlbarránAún no hay calificaciones
- Práctica 1 LinealizaciónDocumento20 páginasPráctica 1 Linealizaciónchamuco9106Aún no hay calificaciones
- Web Conferencia Control Digital Paso 2Documento22 páginasWeb Conferencia Control Digital Paso 2JAVIER MAURICIO CARDENAS RAMIREZAún no hay calificaciones
- Identificación de modelos a partir de curvas de reacciónDocumento10 páginasIdentificación de modelos a partir de curvas de reacciónNaimer Urango BanquethAún no hay calificaciones
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAún no hay calificaciones
- Control PID para Un Sistema de Calefacción de Una Banda TransportadoraDocumento7 páginasControl PID para Un Sistema de Calefacción de Una Banda TransportadoraSebastian Rubio SaenzAún no hay calificaciones
- Fase 1 Loraine GiraldoDocumento9 páginasFase 1 Loraine GiraldoLoreAún no hay calificaciones
- Practica 4 - Solucion de Ecuacion de EstadoDocumento11 páginasPractica 4 - Solucion de Ecuacion de EstadoEdgarFranciscoLozadoCampoverdeAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- ControlIngenieríaPráctica2AnálisisDominioTemporalDocumento3 páginasControlIngenieríaPráctica2AnálisisDominioTemporalJairo RamírezAún no hay calificaciones
- Practica 6Documento2 páginasPractica 6Jairo RamírezAún no hay calificaciones
- Apuntes Sistemas RetardoDocumento1 páginaApuntes Sistemas RetardoJairo RamírezAún no hay calificaciones
- Practica 4 - Modelado y Simulacion 2019 - 20Documento18 páginasPractica 4 - Modelado y Simulacion 2019 - 20Jairo RamírezAún no hay calificaciones
- Sistemas Automatizados ProducciónDocumento33 páginasSistemas Automatizados ProducciónJairo RamírezAún no hay calificaciones
- Apuntes Pid SimulinkDocumento3 páginasApuntes Pid SimulinkJairo RamírezAún no hay calificaciones
- Practica 5 - Sintonizacion de Un Controlador PID 2019 - 20Documento3 páginasPractica 5 - Sintonizacion de Un Controlador PID 2019 - 20Jairo RamírezAún no hay calificaciones
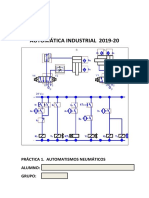
- Practica 1 - Automatismos Neumaticos 2019 - 20Documento7 páginasPractica 1 - Automatismos Neumaticos 2019 - 20Jairo RamírezAún no hay calificaciones
- Practica 1 - Automatismos Neumaticos 2019 - 20Documento7 páginasPractica 1 - Automatismos Neumaticos 2019 - 20Jairo RamírezAún no hay calificaciones
- Curso de Fotografia DigitalDocumento140 páginasCurso de Fotografia DigitalJuliaPestarino100% (2)
- Tecnicas de Inteligencia Artificial en La Construccion de Robots Moviles AutonomosDocumento126 páginasTecnicas de Inteligencia Artificial en La Construccion de Robots Moviles AutonomosAmenhotep ÜbermenschAún no hay calificaciones
- MANUALDEWEYDocumento66 páginasMANUALDEWEYPabloSiegristGabasAún no hay calificaciones
- HidservDocumento1 páginaHidservJairo RamírezAún no hay calificaciones
- Gradoiinformatica 1 Cuat2Documento3 páginasGradoiinformatica 1 Cuat2Jairo RamírezAún no hay calificaciones
- Condiciones GeneralesDocumento6 páginasCondiciones GeneralesJairo RamírezAún no hay calificaciones
- Problemas de Circuitos de Corriente Alterna Paralelo y SeriesDocumento7 páginasProblemas de Circuitos de Corriente Alterna Paralelo y SeriesRichard Briones GonzálezAún no hay calificaciones
- DefinitivoDocumento9 páginasDefinitivoJairo RamírezAún no hay calificaciones
- El Gato de SchrödingerDocumento1 páginaEl Gato de SchrödingerRenato Des CartesAún no hay calificaciones
- Informe de Mecánica de Fluidos I Descarga Por OrificioDocumento8 páginasInforme de Mecánica de Fluidos I Descarga Por OrificioNaferMrtnzMAún no hay calificaciones
- AsdsadasdDocumento22 páginasAsdsadasdJN O MolinaAún no hay calificaciones
- Programa de Balance de MateriaDocumento2 páginasPrograma de Balance de MateriaGlenmar Valladares SalasAún no hay calificaciones
- Tipos de EspectrometríaDocumento63 páginasTipos de EspectrometríaKbaAún no hay calificaciones
- Oscilaciones AmortiguadasDocumento3 páginasOscilaciones AmortiguadasDREAM BOXAún no hay calificaciones
- Resumen de Introducciòn A Las Técnicas EspectroscópicasDocumento2 páginasResumen de Introducciòn A Las Técnicas EspectroscópicasMiguel RomeroAún no hay calificaciones
- Ejercicios 2do Principio Termodinámica 2019-IDocumento2 páginasEjercicios 2do Principio Termodinámica 2019-IRai Delgado Torres100% (1)
- FÓRMULAS FÍSICA ÁREAS VOLÚMENES VELOCIDAD FUERZA ENERGÍADocumento1 páginaFÓRMULAS FÍSICA ÁREAS VOLÚMENES VELOCIDAD FUERZA ENERGÍAJessica JavierAún no hay calificaciones
- Formas de Onda SenoidalesDocumento45 páginasFormas de Onda SenoidalesAltair JimenezAún no hay calificaciones
- Laboratorio No. 4 Leyes de NewtonDocumento6 páginasLaboratorio No. 4 Leyes de NewtonMelany UreñaAún no hay calificaciones
- Termo 7Documento73 páginasTermo 7Lesly PerezAún no hay calificaciones
- Agujero BlancoDocumento1 páginaAgujero BlancojorgeAún no hay calificaciones
- Movimiento circular: cálculos de aceleración, velocidad y radioDocumento2 páginasMovimiento circular: cálculos de aceleración, velocidad y radiooscar sanmiguelAún no hay calificaciones
- Práctica 2 Perez Lopez VictorDocumento8 páginasPráctica 2 Perez Lopez VictorVICTOR PEREZ LOPEZAún no hay calificaciones
- Libro Dinámica Partícula 2015 (Leon Estrada)Documento98 páginasLibro Dinámica Partícula 2015 (Leon Estrada)Daniel Garnica SepulvedaAún no hay calificaciones
- Lab1 Movimiento ParabolicoDocumento4 páginasLab1 Movimiento ParabolicoangieAún no hay calificaciones
- Parámetros ondas electromagnéticas UFPSDocumento3 páginasParámetros ondas electromagnéticas UFPSWILLIAM ABRIL GARCIAAún no hay calificaciones
- FRICCION PAVIMENTOS INGENIERIADocumento18 páginasFRICCION PAVIMENTOS INGENIERIAAndruRamirezAún no hay calificaciones
- Informe de Laboratorio Ondas Estacionarias en Una CuerdaDocumento7 páginasInforme de Laboratorio Ondas Estacionarias en Una CuerdaGeorffrey Arevalo100% (1)
- La Carga Eléctrica Se Transmite Por Medio de Los Electrones Porque Son Las Partículas Atómicas de Menor Masa y Que Disponen Por Ello de Facilidad de MovimientoDocumento1 páginaLa Carga Eléctrica Se Transmite Por Medio de Los Electrones Porque Son Las Partículas Atómicas de Menor Masa y Que Disponen Por Ello de Facilidad de MovimientoLuis Miguel Huamani100% (1)
- Exposición Geomecanica en Shales - Fragilidad 100316Documento13 páginasExposición Geomecanica en Shales - Fragilidad 100316Braulio Vanegas HernandezAún no hay calificaciones
- Conservación de la energía mecánica en sistema masa-resorteDocumento3 páginasConservación de la energía mecánica en sistema masa-resorteMathias TapiaAún no hay calificaciones
- Soluciones Medios Anisotropos (Optica)Documento2 páginasSoluciones Medios Anisotropos (Optica)Alejandro ArribasAún no hay calificaciones
- En Qué Consiste La Segunda Ley de La TermodinámicaDocumento10 páginasEn Qué Consiste La Segunda Ley de La Termodinámicadavid muñozAún no hay calificaciones
- Problema 2.84, Streeter, 9a Edición: Cálculo de la fuerza F para mantener cerrada una compuerta cilíndricaDocumento5 páginasProblema 2.84, Streeter, 9a Edición: Cálculo de la fuerza F para mantener cerrada una compuerta cilíndricaalex gmAún no hay calificaciones
- Mecánica de fluidos: Simulación de presión hidrostática y ecuación de BernoulliDocumento21 páginasMecánica de fluidos: Simulación de presión hidrostática y ecuación de BernoulliOHANA GAMERAún no hay calificaciones
- Cálculo longitud máxima tubería enchaquetadaDocumento5 páginasCálculo longitud máxima tubería enchaquetadaingalcalagAún no hay calificaciones
- Trabajo Final MEF-2022 23Documento27 páginasTrabajo Final MEF-2022 23Moumenine HoussamAún no hay calificaciones