También podría gustarte
- Sistema de Lubricación de La Caja de CambiosDocumento7 páginasSistema de Lubricación de La Caja de Cambiosmiguel.pelegrin100% (1)
- Estructura de La Industria Automotriz ArgentinaDocumento16 páginasEstructura de La Industria Automotriz ArgentinaezequielAún no hay calificaciones
- Prueba U1 Onda 1 MedioDocumento4 páginasPrueba U1 Onda 1 MediomariajoseAún no hay calificaciones
- Arbol de Levas InstalarDocumento9 páginasArbol de Levas InstalarEduardo AlvarezAún no hay calificaciones
- Curso Frenos ABSDocumento86 páginasCurso Frenos ABSJunior SalazarAún no hay calificaciones
- Manual de Equipo de Control de Pozo PDFDocumento106 páginasManual de Equipo de Control de Pozo PDFFranco SotoAún no hay calificaciones
- Propiedades Mecánicas de La Mamposteria PDFDocumento41 páginasPropiedades Mecánicas de La Mamposteria PDFDemian Matus MatusAún no hay calificaciones
- Sintesis Del Diseño MecánicoDocumento2 páginasSintesis Del Diseño MecánicoezequielAún no hay calificaciones
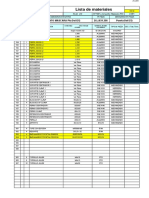
- OF1001 - Conjunto Mascara PDI - Lista Mat - Rev02Documento1 páginaOF1001 - Conjunto Mascara PDI - Lista Mat - Rev02ezequielAún no hay calificaciones
- Engranes HipoidalesDocumento21 páginasEngranes HipoidalesezequielAún no hay calificaciones
- U2 Tema3. Gases IdealesDocumento11 páginasU2 Tema3. Gases IdealesRICHARD JAMES ROCANO YUPAAún no hay calificaciones
- Conceptos TérmicosDocumento5 páginasConceptos Térmicosoctaviopozo andresauriaAún no hay calificaciones
- Tipos de Motores de ArranqueDocumento2 páginasTipos de Motores de Arranquealex caizaAún no hay calificaciones
- Cap 22 - OndasDocumento16 páginasCap 22 - OndasMercedes PpccAún no hay calificaciones
- Guia Aprendizaje 1Documento8 páginasGuia Aprendizaje 1Jairo César Monterroza MejíaAún no hay calificaciones
- La Historia de La TermodinámicaDocumento3 páginasLa Historia de La TermodinámicaCrisAún no hay calificaciones
- Guias A10051001cinematicaDecimo 1 PDFDocumento5 páginasGuias A10051001cinematicaDecimo 1 PDFAsistentequiposcc ColpatriaAún no hay calificaciones
- Metodo Numerico Fenomeno TranspDocumento310 páginasMetodo Numerico Fenomeno TranspYolver peñalozaAún no hay calificaciones
- 5 2 Catastro Palas Todas Las Marcas V3Documento6 páginas5 2 Catastro Palas Todas Las Marcas V3Hernan Gutierrez Aguilera100% (2)
- Nom-Z-83 - 1987 Representacion de EngranesDocumento8 páginasNom-Z-83 - 1987 Representacion de EngranesArturo Silva Hernandez100% (1)
- Porticos ExcentricosDocumento22 páginasPorticos ExcentricosAdery Baltodano MonterreyAún no hay calificaciones
- Engranes HelicoidalesDocumento9 páginasEngranes HelicoidalesAlbertoAún no hay calificaciones
- Laboratorio #6Documento5 páginasLaboratorio #6Joselin Rojas GuerraAún no hay calificaciones
- Equilíbrio Mecánico para Segundo Grado de SecundariaDocumento3 páginasEquilíbrio Mecánico para Segundo Grado de SecundariaJhonny Zacarias Larico HuallpaAún no hay calificaciones
- Física General (L) - Repasos 1er ParcialDocumento5 páginasFísica General (L) - Repasos 1er ParcialJahasiel RobertoAún no hay calificaciones
- Laboratorio N 2 Pendulo AcopladoDocumento8 páginasLaboratorio N 2 Pendulo AcopladoJorge Luis Alarcon RestrepoAún no hay calificaciones
- Control InventarioDocumento6 páginasControl InventarioJuan Marcos Iporre ChumaceroAún no hay calificaciones
- Tranferencia de Calor en LechosDocumento146 páginasTranferencia de Calor en LechosAnaMLondoñoAún no hay calificaciones
- Ficha Tecnica Perforadora D650Documento8 páginasFicha Tecnica Perforadora D650Christian Velásquez Salazar100% (1)
- Tema 05Documento47 páginasTema 05royer manayayAún no hay calificaciones
- Afinacion de Motores Inyeccion ElectronicaDocumento52 páginasAfinacion de Motores Inyeccion ElectronicaHilario Gayosso Cruz100% (1)
- VenturiDocumento15 páginasVenturicuentabasura516Aún no hay calificaciones
- Lab - medidorPlacaOrificioDocumento2 páginasLab - medidorPlacaOrificioYanira DonosoAún no hay calificaciones
- Movimiento Circular UniformeDocumento10 páginasMovimiento Circular UniformeEduardo CastilloAún no hay calificaciones