También podría gustarte
- Astrologia y FloresDocumento25 páginasAstrologia y FloresEdo tetragramaton100% (2)
- Sistema Por Unidad EjerciciosDocumento22 páginasSistema Por Unidad EjerciciosJuan Santiago Bolivar GomezAún no hay calificaciones
- Tejido SanguineoDocumento2 páginasTejido SanguineoAnonymous TaDw7ejHk100% (2)
- 2019 Linea Larga AnalisisDocumento98 páginas2019 Linea Larga AnalisisJUAN PABLOAún no hay calificaciones
- S12 - PPT Combinación LinealDocumento26 páginasS12 - PPT Combinación LinealJUAN MEDINA CRUZADO50% (2)
- Evaluación Final - Finanzas - AsturiasDocumento7 páginasEvaluación Final - Finanzas - AsturiasDiana Rueda MardiniAún no hay calificaciones
- Guia CCNN 6 SH Cast-Voramar PDFDocumento160 páginasGuia CCNN 6 SH Cast-Voramar PDFbeatriz75% (4)
- Valores y Vectores PropiosDocumento5 páginasValores y Vectores PropiosDario Javier100% (1)
- Rompecabezas educativosDocumento10 páginasRompecabezas educativosAyelén Carbone50% (2)
- Vectores y Valores PropiosDocumento12 páginasVectores y Valores PropiosJose AlcantaraAún no hay calificaciones
- Temas 1-3Documento42 páginasTemas 1-3vitalsetupsAún no hay calificaciones
- Transformaciones 4Documento3 páginasTransformaciones 4Ángel Mateo Vásquez GerenaAún no hay calificaciones
- A - Anexo Transformaciones Lineales PDFDocumento43 páginasA - Anexo Transformaciones Lineales PDFDavid Ariel Coca PerezAún no hay calificaciones
- Regresion Lineal (Metodo Minimos Cuadrados)Documento8 páginasRegresion Lineal (Metodo Minimos Cuadrados)Charles Zambrano0% (1)
- Apuntes Unidad 4 Algebra LinealDocumento3 páginasApuntes Unidad 4 Algebra LinealJorge Maximiliano Salas RamosAún no hay calificaciones
- Clase Correlacion CanonicaDocumento31 páginasClase Correlacion CanonicaCamila Andrea Olivero ArayaAún no hay calificaciones
- Espacio - Vectorial TEORIADocumento17 páginasEspacio - Vectorial TEORIAfranco bejaranoAún no hay calificaciones
- EigenvaloresDocumento13 páginasEigenvaloresMarvin H. ReinosoAún no hay calificaciones
- U 5 - Espacios VectorialesDocumento13 páginasU 5 - Espacios VectorialesHernán Alexis AvalosAún no hay calificaciones
- Examen 02 - 2022Documento12 páginasExamen 02 - 2022Rue ChiquitaAún no hay calificaciones
- Semana 11Documento28 páginasSemana 11Saúl OrtizAún no hay calificaciones
- Algebra Lineal Taller 4 Espacios VectorialesDocumento306 páginasAlgebra Lineal Taller 4 Espacios VectorialesFelipe Chaves DelgadilloAún no hay calificaciones
- Vectores y Valores PropiosDocumento1 páginaVectores y Valores PropiosMaleja ZamoraAún no hay calificaciones
- Forma Canonica de Jordan y Ecuaciones DiferencialesDocumento18 páginasForma Canonica de Jordan y Ecuaciones Diferencialesozzy999Aún no hay calificaciones
- Teorema de Perron-Frobenius: Apuntes para Modelos Matem Aticos I, Rafael OrtegaDocumento17 páginasTeorema de Perron-Frobenius: Apuntes para Modelos Matem Aticos I, Rafael OrtegaTatiana Barros MihovichAún no hay calificaciones
- UNIDAD 6Documento19 páginasUNIDAD 6Santiago GonzalezAún no hay calificaciones
- Tema 3 Espacios VectorialesDocumento20 páginasTema 3 Espacios VectorialesLyon T IonAún no hay calificaciones
- MATE1105 - Algebra Lineal - Parcial 1 (A) : Nombre: C OdigoDocumento4 páginasMATE1105 - Algebra Lineal - Parcial 1 (A) : Nombre: C OdigoAntoni AvilaAún no hay calificaciones
- Lista2 oDocumento2 páginasLista2 oAndres MorenoAún no hay calificaciones
- Tema 5 EndomorfismosDocumento11 páginasTema 5 EndomorfismosLyon T IonAún no hay calificaciones
- Sistemas lineales y espacios vectorialesDocumento5 páginasSistemas lineales y espacios vectorialesJosue LuceroAún no hay calificaciones
- DiagonalizacionDocumento26 páginasDiagonalizacionAlexAún no hay calificaciones
- Espacios VectorialesDocumento30 páginasEspacios VectorialesventamundiAún no hay calificaciones
- Tema V - ResumenDocumento6 páginasTema V - ResumenAlicia MartínezAún no hay calificaciones
- Estadistica IiDocumento20 páginasEstadistica Iijetzabet tolentinoAún no hay calificaciones
- Documento Sin TítuloDocumento28 páginasDocumento Sin TítuloMaría Alejandra Sant GarciaAún no hay calificaciones
- Polinomio Característico, Valores Propios y Vectores PropiosDocumento15 páginasPolinomio Característico, Valores Propios y Vectores PropiosEstefany OrtegaAún no hay calificaciones
- DiagonalizacionDocumento12 páginasDiagonalizacionLeonel Sebastian Fontan DesimoneAún no hay calificaciones
- Supuestos Del Modelo de Regresion Lineal PDFDocumento1 páginaSupuestos Del Modelo de Regresion Lineal PDFMoises Hurtado100% (1)
- Diagonalización de matrices: autovalores y autovectoresDocumento6 páginasDiagonalización de matrices: autovalores y autovectoresFrancisco JimenezAún no hay calificaciones
- Diapositva RegresionDocumento35 páginasDiapositva RegresionLALAAún no hay calificaciones
- Pauta Certamen 1 2017 2Documento4 páginasPauta Certamen 1 2017 2Esteban Andrés Lazo ReyesAún no hay calificaciones
- Reglas de Derivación Algebraicas PDFDocumento4 páginasReglas de Derivación Algebraicas PDFBrayam VallejoAún no hay calificaciones
- Estadistica IiDocumento19 páginasEstadistica Iijetzabet tolentinoAún no hay calificaciones
- Tema1 CondicionamientoDocumento34 páginasTema1 CondicionamientoMaria Hidalgo MurilloAún no hay calificaciones
- (Compilado Omitiendo Errores) PDFDocumento14 páginas(Compilado Omitiendo Errores) PDFKylie PayneAún no hay calificaciones
- Unidad 4. (4.1-4.3) ChicosDocumento8 páginasUnidad 4. (4.1-4.3) ChicosadrianAún no hay calificaciones
- CE89 Sesión 5.1 Martes 31.08.21Documento31 páginasCE89 Sesión 5.1 Martes 31.08.21CrishAún no hay calificaciones
- Resumen DiagonalizacionDocumento5 páginasResumen DiagonalizacionRuben FraguelAún no hay calificaciones
- EAA1520 - 2023 - 02 - Taller R - 12Documento22 páginasEAA1520 - 2023 - 02 - Taller R - 12Sebax RengifoAún no hay calificaciones
- Semana 7 - Correlación y Regresión LinealDocumento38 páginasSemana 7 - Correlación y Regresión LinealEnoc SantosAún no hay calificaciones
- AlgebraLinealTema1 2Documento25 páginasAlgebraLinealTema1 2Logan ArcherAún no hay calificaciones
- Guia4 PDFDocumento2 páginasGuia4 PDFXzpita12Aún no hay calificaciones
- Tabla de Integrales ExamenDocumento2 páginasTabla de Integrales ExamenEstefania EscalanteAún no hay calificaciones
- Notas de Clase Bras y Kets en Algebra LinealDocumento6 páginasNotas de Clase Bras y Kets en Algebra LinealMichael Roberto Chantes DazaAún no hay calificaciones
- Expo de FluidosDocumento34 páginasExpo de FluidosElden Vasquez LlamoAún no hay calificaciones
- Problemas 1Documento3 páginasProblemas 1Emilio Rey TorrijosAún no hay calificaciones
- El Espacio Vectorial BUENODocumento65 páginasEl Espacio Vectorial BUENOSEBASTIAN BETIN MONTERROSAAún no hay calificaciones
- Algebra Lineal Semana - 7Documento18 páginasAlgebra Lineal Semana - 7Helen DayelyAún no hay calificaciones
- Tema 6 Autovalores y AutovectoresDocumento41 páginasTema 6 Autovalores y AutovectoresBARRIENTOS SUCA ERICK ALAINAún no hay calificaciones
- Taller de Repaso Final Algebra Lineal SOLUCIONDocumento16 páginasTaller de Repaso Final Algebra Lineal SOLUCIONAnthony LogroñoAún no hay calificaciones
- Talleres Algebra LinealDocumento15 páginasTalleres Algebra LinealMiguel CruzAún no hay calificaciones
- Tema 6 Espacio EuclideoDocumento15 páginasTema 6 Espacio EuclideoLyon T IonAún no hay calificaciones
- 5 EDO AutónomasDocumento11 páginas5 EDO AutónomasJADIRAAún no hay calificaciones
- TEMA11Documento62 páginasTEMA11Tonas RebelAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- KonakiDocumento4 páginasKonakiJOHN HERNANDEZAún no hay calificaciones
- Resumen NONAKADocumento2 páginasResumen NONAKAJOHN HERNANDEZAún no hay calificaciones
- Contenidos Tecnicas MultivariantesDocumento10 páginasContenidos Tecnicas MultivariantesJOHN HERNANDEZAún no hay calificaciones
- OrtegaDocumento1 páginaOrtegaJOHN HERNANDEZAún no hay calificaciones
- Tema 12Documento26 páginasTema 12JOHN HERNANDEZAún no hay calificaciones
- Clases 01 y 02-Insti - Asist.MedicasDocumento87 páginasClases 01 y 02-Insti - Asist.MedicasJOHN HERNANDEZAún no hay calificaciones
- Tema 11Documento22 páginasTema 11JOHN HERNANDEZAún no hay calificaciones
- 02-1 - Clases Instal. Ind-Tipos de SE PDFDocumento45 páginas02-1 - Clases Instal. Ind-Tipos de SE PDFSamuel JimenezAún no hay calificaciones
- Clases Instal. Ind - 04-1-Descripción SEDocumento61 páginasClases Instal. Ind - 04-1-Descripción SEJOHN HERNANDEZAún no hay calificaciones
- Contenidos Metodología de La InvestigaciónDocumento10 páginasContenidos Metodología de La InvestigaciónJOHN HERNANDEZAún no hay calificaciones
- 02-1 - Clases Instal. Ind-Tipos de SE PDFDocumento45 páginas02-1 - Clases Instal. Ind-Tipos de SE PDFSamuel JimenezAún no hay calificaciones
- Clases Instal. Ind - 04-1-Descripción SEDocumento61 páginasClases Instal. Ind - 04-1-Descripción SEJOHN HERNANDEZAún no hay calificaciones
- 02-1 - Clases Instal. Ind-Tipos de SE PDFDocumento45 páginas02-1 - Clases Instal. Ind-Tipos de SE PDFSamuel JimenezAún no hay calificaciones
- PSmarkup - PRUEBA - DE - EVALUACION Resuelta PDFDocumento6 páginasPSmarkup - PRUEBA - DE - EVALUACION Resuelta PDFJOHN HERNANDEZAún no hay calificaciones
- Tema 1Documento21 páginasTema 1Holger ArévaloAún no hay calificaciones
- Calculos Diseño Trafos UciDocumento4 páginasCalculos Diseño Trafos UciJOHN HERNANDEZAún no hay calificaciones
- Formato - Control de Asistencia A ClasesDocumento2 páginasFormato - Control de Asistencia A ClasesJOHN HERNANDEZAún no hay calificaciones
- Cátedra-Internacional V6Documento8 páginasCátedra-Internacional V6JOHN HERNANDEZAún no hay calificaciones
- Especificaciones TecnicasDocumento3 páginasEspecificaciones TecnicasJOHN HERNANDEZAún no hay calificaciones
- Tema03 PER1071 1 PDFDocumento41 páginasTema03 PER1071 1 PDFJOHN HERNANDEZAún no hay calificaciones
- Fecha 25 de Septiembre de 2019Documento2 páginasFecha 25 de Septiembre de 2019JOHN HERNANDEZAún no hay calificaciones
- Resolución de integrales mediante métodos de integraciónDocumento2 páginasResolución de integrales mediante métodos de integraciónJOHN HERNANDEZAún no hay calificaciones
- Especificaciones TecnicasDocumento3 páginasEspecificaciones TecnicasJOHN HERNANDEZAún no hay calificaciones
- Parcial 1 CalculoDocumento2 páginasParcial 1 CalculoJOHN HERNANDEZAún no hay calificaciones
- Parcial Ecuaciones Diferenciales PDFDocumento2 páginasParcial Ecuaciones Diferenciales PDFJOHN HERNANDEZAún no hay calificaciones
- Taller de repaso de ecuaciones diferencialesDocumento3 páginasTaller de repaso de ecuaciones diferencialesJOHN HERNANDEZAún no hay calificaciones
- Paucar Cordero Julio EmilianoDocumento19 páginasPaucar Cordero Julio EmilianoJohnny Abraham Reyes AndradeAún no hay calificaciones
- Entrega de Trabajo de InvestigacionDocumento4 páginasEntrega de Trabajo de Investigacionsarz.riveraAún no hay calificaciones
- Importancia Educación FísicaDocumento12 páginasImportancia Educación FísicaÉrica Vásquez de la CruzAún no hay calificaciones
- Div Vegetal Campbell PDFDocumento38 páginasDiv Vegetal Campbell PDFMiguel Angel SarmientoAún no hay calificaciones
- Tercer Taller - Cartera NivelaciónDocumento12 páginasTercer Taller - Cartera NivelaciónJulian GonzalezAún no hay calificaciones
- Ficha Ajuste de Cono Con Agua en ObraDocumento2 páginasFicha Ajuste de Cono Con Agua en ObrajaimeAún no hay calificaciones
- Practica de Laboratorio Evaluación 1 CS NaturalesDocumento3 páginasPractica de Laboratorio Evaluación 1 CS NaturalesalbaniaAún no hay calificaciones
- Método de La MDocumento4 páginasMétodo de La MAlejandra SantaMAún no hay calificaciones
- PRESUPUESTODocumento2 páginasPRESUPUESTOjose calderonAún no hay calificaciones
- Planificacion Estrategica 900467 T - HDocumento9 páginasPlanificacion Estrategica 900467 T - HgladismartAún no hay calificaciones
- Análisis de Los Tipos de InvestigaciónDocumento4 páginasAnálisis de Los Tipos de InvestigacióngloriaAún no hay calificaciones
- Red de Desague Alfonso UgarteDocumento5 páginasRed de Desague Alfonso UgarteKlisbert Ayrton Beltran LauraAún no hay calificaciones
- FS Aspergillosis ESDocumento2 páginasFS Aspergillosis ESGMBRUMELAún no hay calificaciones
- ActaInscripcion 17501083Documento1 páginaActaInscripcion 17501083Galo Esteban SalgueroAún no hay calificaciones
- Lectura La LluviaDocumento9 páginasLectura La LluviaSeong-Jin Seong-Jin Seong-JinAún no hay calificaciones
- Unidad 2Documento7 páginasUnidad 2Jaqueline Losada AngaritaAún no hay calificaciones
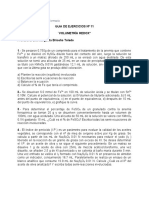
- Guia 11 Volumetría REDOXDocumento2 páginasGuia 11 Volumetría REDOXJavi AnainAún no hay calificaciones
- Org2 Las Aproximaciones Descriptivas y PositivasDocumento5 páginasOrg2 Las Aproximaciones Descriptivas y PositivasDaniela Alexandra Caceres BedoyaAún no hay calificaciones
- TALLER DE LECTURA CRÍTICA - UNA CARTA A GARCIA. RespondidaDocumento2 páginasTALLER DE LECTURA CRÍTICA - UNA CARTA A GARCIA. RespondidaJeimy Valentina Mejia QuiñonesAún no hay calificaciones
- Ema Lic A M Pil 2022Documento6 páginasEma Lic A M Pil 2022licendyAún no hay calificaciones
- SellalkaliDocumento1 páginaSellalkalifenix_suAún no hay calificaciones
- PSP - Nucleo Siguas Oficial 2022Documento6 páginasPSP - Nucleo Siguas Oficial 2022Pamela ValenciaAún no hay calificaciones
- Info Tec Corax SCDocumento3 páginasInfo Tec Corax SCJonathan GonzalezAún no hay calificaciones
- Tipos de MuestreoDocumento29 páginasTipos de MuestreoevelynAún no hay calificaciones
- Informe de IndagaciónDocumento5 páginasInforme de IndagaciónAnita MoreAún no hay calificaciones