También podría gustarte
- Introducción Al OrganoDocumento15 páginasIntroducción Al OrganoÁngel Jair Pava HernándezAún no hay calificaciones
- InfLab - #3 y #4Documento19 páginasInfLab - #3 y #4Rosa Isela Tapia VasquezAún no hay calificaciones
- Leyes Fundamentalesde La FotoquimicaDocumento4 páginasLeyes Fundamentalesde La FotoquimicaLauriza Giraldo HuamanAún no hay calificaciones
- Ejemplos de Dev C ++Documento6 páginasEjemplos de Dev C ++Jonathan Arley Torres CastañedaAún no hay calificaciones
- Guia Programacion Dkda 16 32 80Documento276 páginasGuia Programacion Dkda 16 32 80larata29Aún no hay calificaciones
- Determinación del contenido de aire en concreto fresco por presiónDocumento7 páginasDeterminación del contenido de aire en concreto fresco por presiónIsrael Osuna CabreraAún no hay calificaciones
- Valores y Vectores Propios Aplicados A Mecanica de SolidosDocumento28 páginasValores y Vectores Propios Aplicados A Mecanica de SolidosWilcer Cusquisiban De La CruzAún no hay calificaciones
- Dramix 3DDocumento1 páginaDramix 3DAlvaro DíazAún no hay calificaciones
- 2 Ejercicios de Propieades FisicasDocumento13 páginas2 Ejercicios de Propieades FisicasSuel Cayllahua LisetAún no hay calificaciones
- Influencia Del Uso de La Microsilice en La Resistencia A La Compresion y Durabilidad Del Concreto HidraulicoDocumento14 páginasInfluencia Del Uso de La Microsilice en La Resistencia A La Compresion y Durabilidad Del Concreto HidraulicojosepalacioshAún no hay calificaciones
- Unidad 2 ActividadDocumento5 páginasUnidad 2 ActividadXimena VillavicencioAún no hay calificaciones
- Diseño mezclas concreto 10 pasosDocumento5 páginasDiseño mezclas concreto 10 pasososcarcoyAún no hay calificaciones
- Informe Cantera CarboneraDocumento23 páginasInforme Cantera CarboneraSamuel AlvaAún no hay calificaciones
- Evaluación Parcial - Planeamiento EstratégicoDocumento5 páginasEvaluación Parcial - Planeamiento EstratégicoLuis Blas Carhuaz CarrascoAún no hay calificaciones
- Clasificacion de Suelos Con TablasDocumento7 páginasClasificacion de Suelos Con TablasEslander Agustín FloresAún no hay calificaciones
- Simplificación de sistemas de fuerzas mediante fuerza y par resultanteDocumento1 páginaSimplificación de sistemas de fuerzas mediante fuerza y par resultanteMara Pierre100% (1)
- 02 Integrales Dobles Iteradas en Regiones Rectangulares Ucv-UssDocumento15 páginas02 Integrales Dobles Iteradas en Regiones Rectangulares Ucv-UssMiguel Agustin Navarro MedinaAún no hay calificaciones
- Semana 11 O - Special Types of Concrete - PCA Chapter 20Documento20 páginasSemana 11 O - Special Types of Concrete - PCA Chapter 20Wilian Gustavo Velasquez QuispeAún no hay calificaciones
- Ejemplo de Investigacion PDFDocumento4 páginasEjemplo de Investigacion PDFdeyvisAún no hay calificaciones
- Registro para La Obtención de CamisetasDocumento1 páginaRegistro para La Obtención de Camisetasadriel38100% (1)
- Informe Mecanica de Suelos AASHTODocumento10 páginasInforme Mecanica de Suelos AASHTOJairo Licanqueo AbarcaAún no hay calificaciones
- Informe Final Materiales - Hormigon Con FibrasDocumento23 páginasInforme Final Materiales - Hormigon Con FibrasMartin FolkAún no hay calificaciones
- Estructura Del SueloDocumento41 páginasEstructura Del SueloAnonymous 6meMTlAún no hay calificaciones
- Flujo Proctor Modificado UY S - 17 - 89Documento1 páginaFlujo Proctor Modificado UY S - 17 - 89jmario85Aún no hay calificaciones
- S07 Hvizconde 2022 01Documento45 páginasS07 Hvizconde 2022 01Homero MorenoAún no hay calificaciones
- PC2 - 2020 - 2 - Parte 1Documento1 páginaPC2 - 2020 - 2 - Parte 1Okay?Aún no hay calificaciones
- Diagrama de Flujo Inv e - 106Documento1 páginaDiagrama de Flujo Inv e - 106Ariel CuadroAún no hay calificaciones
- Medición topográficaDocumento24 páginasMedición topográficaYohn Quispe RodriguezAún no hay calificaciones
- Ejercicio #04 Solucion A y BDocumento5 páginasEjercicio #04 Solucion A y Bjoel quincho ramosAún no hay calificaciones
- CEMENTO MS RESISTENTE SULFATOS AGREGADOSDocumento28 páginasCEMENTO MS RESISTENTE SULFATOS AGREGADOSDo-SantosAún no hay calificaciones
- Mecanica de Suelo T3 Avilez - JoeDocumento3 páginasMecanica de Suelo T3 Avilez - Joejoe avilezAún no hay calificaciones
- Consistencia Normal Del Cemento PortlandDocumento8 páginasConsistencia Normal Del Cemento PortlandJeny Panez GarciaAún no hay calificaciones
- Semana 4 - U2 - Teoría de Consolidación y Resistencia Al Esfuerzo CortanteDocumento28 páginasSemana 4 - U2 - Teoría de Consolidación y Resistencia Al Esfuerzo CortanteLuis CristhianAún no hay calificaciones
- Ejercicio II.4 Diagrama de Fases y Clasificacion de SuelosDocumento6 páginasEjercicio II.4 Diagrama de Fases y Clasificacion de SuelosRichard Chavez Castro0% (1)
- Deficiencias de La Construcción en El PerúDocumento7 páginasDeficiencias de La Construcción en El PerúGuadalupe JarataAún no hay calificaciones
- Diseño de Mezclas Método ACI EjercicioDocumento11 páginasDiseño de Mezclas Método ACI EjercicioJAvier LanDinezAún no hay calificaciones
- STRING KARMA Dejate AmarDocumento6 páginasSTRING KARMA Dejate AmarEleuterio Ponce PancaAún no hay calificaciones
- NTP 339.128 - Análisis GranulométricoDocumento30 páginasNTP 339.128 - Análisis GranulométricoAnderson Ruiz LopezAún no hay calificaciones
- Propiedades físicas y granulometría de agregados finos y gruesosDocumento1 páginaPropiedades físicas y granulometría de agregados finos y gruesosjoel quincho ramosAún no hay calificaciones
- EXAMEN PARCIAL - MATERIALES DE CONSTRUCCION (Martes) - 2021 - 2 KEVIN MATIAS TUEROS ROSALESDocumento6 páginasEXAMEN PARCIAL - MATERIALES DE CONSTRUCCION (Martes) - 2021 - 2 KEVIN MATIAS TUEROS ROSALESKevin TuerosAún no hay calificaciones
- PrototipoDocumento5 páginasPrototipoFRANZ ALIAGA MAMANIAún no hay calificaciones
- Tema Semana 3 - PavimentosDocumento35 páginasTema Semana 3 - PavimentosERICK ANGHELO GUERRA ESPINOZAAún no hay calificaciones
- EXAMEN FINAL- CB415HDocumento2 páginasEXAMEN FINAL- CB415HFERNANDO EDUARDO BENDEZU SAAVEDRAAún no hay calificaciones
- Cilindro con émbolo y agua a 50°CDocumento2 páginasCilindro con émbolo y agua a 50°CAndres Yamit Campo ValleAún no hay calificaciones
- Semana 02 O - Portland, Blended and Other Hydraulic Cement C - PCA Chapter 3.en - Es PDFDocumento38 páginasSemana 02 O - Portland, Blended and Other Hydraulic Cement C - PCA Chapter 3.en - Es PDFKevin RamónAún no hay calificaciones
- Ensayo Proctor Modificado para determinar la curva de compactación de un sueloDocumento17 páginasEnsayo Proctor Modificado para determinar la curva de compactación de un sueloLennin HinostrozaAún no hay calificaciones
- PC2 - Estatica Upc 2022 - 00Documento3 páginasPC2 - Estatica Upc 2022 - 00Esteban Rojas pascualAún no hay calificaciones
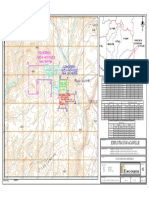
- 03 Plano - Concesiones MinerasDocumento1 página03 Plano - Concesiones MinerasYudshi Chambi MamaniAún no hay calificaciones
- Puente Los Serranos y canteras Santa CruzDocumento1 páginaPuente Los Serranos y canteras Santa CruzJherry Rivera BarbozaAún no hay calificaciones
- Actividades Adicionales de Matemática 3Documento33 páginasActividades Adicionales de Matemática 3cesar_al31_312184795100% (1)
- Informe-Resistencia Del ConcretoDocumento7 páginasInforme-Resistencia Del ConcretoJHOE FARLEY YROGOIN FLORES100% (1)
- Dosificación Del ConcretoDocumento4 páginasDosificación Del ConcretoCarlos Stive Arce SalazarAún no hay calificaciones
- TECNOLOGÍA DEL CONCRETO: CÁLCULO DE MEZCLA PARA VIGA PERALTADADocumento4 páginasTECNOLOGÍA DEL CONCRETO: CÁLCULO DE MEZCLA PARA VIGA PERALTADABreisner Camacho Delgado100% (1)
- EXAMEN T3 - GRUPO 03 - Laboratorio - 9800Documento5 páginasEXAMEN T3 - GRUPO 03 - Laboratorio - 9800Kevin Daniel Guerrero TolentinoAún no hay calificaciones
- Ejercicio Aplicado Cortes de CarreteraDocumento3 páginasEjercicio Aplicado Cortes de CarreteraLuisAún no hay calificaciones
- Abelardo Richard Tesis Bachiller 2018 Part.3 PDFDocumento50 páginasAbelardo Richard Tesis Bachiller 2018 Part.3 PDFMaria Phaola Aguilar FuentesAún no hay calificaciones
- Algoritmo de ConcretoDocumento3 páginasAlgoritmo de ConcretoGary GomezAún no hay calificaciones
- Guía Lab z348 03 Rev.0 Flexión Actualizado Envia Alvarez Loli TomasDocumento10 páginasGuía Lab z348 03 Rev.0 Flexión Actualizado Envia Alvarez Loli TomasLuiz VaquezAún no hay calificaciones
- Ensayo para Determinar La Densidad y Peso Unitario Del Suelo InsituDocumento3 páginasEnsayo para Determinar La Densidad y Peso Unitario Del Suelo InsituKevin VargasAún no hay calificaciones
- 8 Momento Par PDFDocumento3 páginas8 Momento Par PDFALONDRA FERNANDEZAún no hay calificaciones
- Trabajo para La T2 - Materiales de Construcción (Grupo 3) PDFDocumento88 páginasTrabajo para La T2 - Materiales de Construcción (Grupo 3) PDFZevahc RalipAún no hay calificaciones
- Esquema de Proyecto Plan EmprendedorDocumento3 páginasEsquema de Proyecto Plan EmprendedorCharles WarAún no hay calificaciones
- Tarea U1 Temas1.2 Desplaza Vel Aceleración SN PDFDocumento2 páginasTarea U1 Temas1.2 Desplaza Vel Aceleración SN PDFandreAún no hay calificaciones
- Unidad IvDocumento98 páginasUnidad IvLauriza Giraldo HuamanAún no hay calificaciones
- Anal. Estruc. Clase y Asig 2Documento10 páginasAnal. Estruc. Clase y Asig 2zaidy acuñaAún no hay calificaciones
- Fisica III LAB 2Documento17 páginasFisica III LAB 2Lauriza Giraldo HuamanAún no hay calificaciones
- Fisica III LAB 3Documento22 páginasFisica III LAB 3Lauriza Giraldo HuamanAún no hay calificaciones
- Ejercicio 1Documento11 páginasEjercicio 1Lauriza Giraldo HuamanAún no hay calificaciones
- ESTADISTICA MINAS - Docx 222Documento23 páginasESTADISTICA MINAS - Docx 222Lauriza Giraldo HuamanAún no hay calificaciones
- Unidad IDocumento29 páginasUnidad ILauriza Giraldo HuamanAún no hay calificaciones
- Unidad IvDocumento97 páginasUnidad IvLauriza Giraldo HuamanAún no hay calificaciones
- Unidad IvDocumento97 páginasUnidad IvLauriza Giraldo HuamanAún no hay calificaciones
- Cinética química: Factores que afectan la velocidad de reaccionesDocumento14 páginasCinética química: Factores que afectan la velocidad de reaccionesLauriza Giraldo HuamanAún no hay calificaciones
- Yacimiento de Origen SedimentarioDocumento9 páginasYacimiento de Origen SedimentarioLauriza Giraldo HuamanAún no hay calificaciones
- Unidad IiDocumento26 páginasUnidad IiLauriza Giraldo Huaman0% (1)
- Unidad IiiDocumento42 páginasUnidad IiiLauriza Giraldo HuamanAún no hay calificaciones
- Estadistica 2017 IIDocumento86 páginasEstadistica 2017 IIValdez V Roy KevinAún no hay calificaciones
- Estatica - MonografiaDocumento26 páginasEstatica - MonografiaLauriza Giraldo HuamanAún no hay calificaciones
- Estatica - MonografiaDocumento26 páginasEstatica - MonografiaLauriza Giraldo HuamanAún no hay calificaciones
- Equilibrio Quimico (Valido)Documento16 páginasEquilibrio Quimico (Valido)Lauriza Giraldo HuamanAún no hay calificaciones
- Yacimiento de Origen SedimentarioDocumento9 páginasYacimiento de Origen SedimentarioLauriza Giraldo HuamanAún no hay calificaciones
- Estatica - MonografiaDocumento26 páginasEstatica - MonografiaLauriza Giraldo HuamanAún no hay calificaciones
- Cinética química: Factores que afectan la velocidad de reaccionesDocumento14 páginasCinética química: Factores que afectan la velocidad de reaccionesLauriza Giraldo HuamanAún no hay calificaciones
- ModeloDocumento9 páginasModeloLauriza Giraldo HuamanAún no hay calificaciones
- Trabajo de EstadisticaDocumento24 páginasTrabajo de EstadisticaLauriza Giraldo HuamanAún no hay calificaciones
- Yacimientos Por Procesos MagmaticosDocumento8 páginasYacimientos Por Procesos MagmaticosLauriza Giraldo HuamanAún no hay calificaciones
- Túneles en Trabajos SubterráneosDocumento3 páginasTúneles en Trabajos SubterráneosLauriza Giraldo HuamanAún no hay calificaciones
- Estadísticos GraficosDocumento14 páginasEstadísticos GraficosLauriza Giraldo HuamanAún no hay calificaciones
- Determinacion Gavimetrica de CenizasDocumento6 páginasDeterminacion Gavimetrica de CenizasLauriza Giraldo HuamanAún no hay calificaciones
- MetereoriZacion YaciDocumento10 páginasMetereoriZacion YaciLauriza Giraldo HuamanAún no hay calificaciones
- Yacimientos Por Procesos MagmaticosDocumento8 páginasYacimientos Por Procesos MagmaticosLauriza Giraldo HuamanAún no hay calificaciones
- Salida A Campo de Geologia EstructuralDocumento24 páginasSalida A Campo de Geologia EstructuralLauriza Giraldo HuamanAún no hay calificaciones
- Terminos de Perforacion y VoladuraDocumento11 páginasTerminos de Perforacion y VoladuraLauriza Giraldo HuamanAún no hay calificaciones
- Ejercicios Ecuaciones DiferencialesDocumento4 páginasEjercicios Ecuaciones DiferencialesKAROLAYS MIELES MOSCOTEAún no hay calificaciones
- Análisis de características en cerdos para selecciónDocumento8 páginasAnálisis de características en cerdos para selecciónGarcía Fernández FernandoAún no hay calificaciones
- Problema 03 Poliedros Regulares en Dimensiones Mayores Que Tres - de La PuenteDocumento4 páginasProblema 03 Poliedros Regulares en Dimensiones Mayores Que Tres - de La Puentevictor manuel gavidia caceresAún no hay calificaciones
- Petrofisica y Registro de Pozos (Recuperado)Documento30 páginasPetrofisica y Registro de Pozos (Recuperado)victor JavierAún no hay calificaciones
- Ensayo SemiologíaDocumento11 páginasEnsayo SemiologíaLiTa kArLy0% (1)
- Taller de Competencias - TPCC1 T1Documento6 páginasTaller de Competencias - TPCC1 T1Wilson Olortiga LeonAún no hay calificaciones
- Diagrama Bimanual Formato en Blanco WordDocumento1 páginaDiagrama Bimanual Formato en Blanco Wordjhorlis barriosAún no hay calificaciones
- Geometria Del EspacioDocumento19 páginasGeometria Del EspacioKelly BenitezAún no hay calificaciones
- Transferencia de masa: fundamentos, tipos y aplicaciones industrialesDocumento30 páginasTransferencia de masa: fundamentos, tipos y aplicaciones industrialesRoy Tristan Silva0% (1)
- Viaje a Santa Cruz - Palpa: tipos de rocasDocumento5 páginasViaje a Santa Cruz - Palpa: tipos de rocasJunior Calle La RosaAún no hay calificaciones
- Ingenieria Fluvial Cap 3Documento16 páginasIngenieria Fluvial Cap 3Joel Christian Soto LeonAún no hay calificaciones
- Método SuperposiciónDocumento23 páginasMétodo SuperposiciónDanferd ValleAún no hay calificaciones
- Informe Rapidas Obras Hidraulicas - FinalDocumento35 páginasInforme Rapidas Obras Hidraulicas - FinalIsaias ShicaAún no hay calificaciones
- Algebra Lineal para Estudiantes de Ingenie - Juan Carlos Del Valle Sotelo-500-1145-300-646 - 279Documento1 páginaAlgebra Lineal para Estudiantes de Ingenie - Juan Carlos Del Valle Sotelo-500-1145-300-646 - 279fernando vasquezAún no hay calificaciones
- 2016-2 S1 LogDocumento2 páginas2016-2 S1 Logmelani VivarAún no hay calificaciones
- A Journey Around Alpha and Omega To Estimate Internal Consistency ReliabilityDocumento28 páginasA Journey Around Alpha and Omega To Estimate Internal Consistency ReliabilityMateus EstevamAún no hay calificaciones
- Ecuaciones Basicas de Segundo Grado.Documento2 páginasEcuaciones Basicas de Segundo Grado.santiago sullcaAún no hay calificaciones
- 01 Teoria de SistemasDocumento4 páginas01 Teoria de SistemasElvis Jeanpier Buendia SurichaquiAún no hay calificaciones
- Reporte de investigación de operacionesDocumento8 páginasReporte de investigación de operacionesAntonio LopezAún no hay calificaciones
- Diseño de Disco de Freno - Con BobCAD-CAMDocumento19 páginasDiseño de Disco de Freno - Con BobCAD-CAMIng. Eliezer ValenciaAún no hay calificaciones
- Aritmética 13Documento4 páginasAritmética 13Oswaldo Aguirre MendozaAún no hay calificaciones
- C# Temas investigación lenguaje programaciónDocumento8 páginasC# Temas investigación lenguaje programaciónAndreaMelissaGarridoAún no hay calificaciones
- Representación gráfica y conceptual de límitesDocumento2 páginasRepresentación gráfica y conceptual de límitesvirginiaAún no hay calificaciones
- Las Ciencias en Grecia Antigua Cientificos Griegos PDFDocumento8 páginasLas Ciencias en Grecia Antigua Cientificos Griegos PDFLucas QuintanaAún no hay calificaciones
- Topografia 04Documento53 páginasTopografia 04IngriMonzón50% (2)
- Examen 4oDocumento4 páginasExamen 4oDavid EscalanteAún no hay calificaciones