También podría gustarte
- Modular Network 1 16-Axis Position Controller For RCP/RCA/RCD/RCS/IS (D) B/SSPA/NS (A) /DDADocumento36 páginasModular Network 1 16-Axis Position Controller For RCP/RCA/RCD/RCS/IS (D) B/SSPA/NS (A) /DDAEstebanAún no hay calificaciones
- RCP2CR-RCP2W RotaryType 0615 EngDocumento16 páginasRCP2CR-RCP2W RotaryType 0615 EngEstebanAún no hay calificaciones
- Robonet Eng V2Documento12 páginasRobonet Eng V2EstebanAún no hay calificaciones
- Rcs2-Rtc: Large Diameter Hollow Rotary Type RobocylinderDocumento8 páginasRcs2-Rtc: Large Diameter Hollow Rotary Type RobocylinderEstebanAún no hay calificaciones
- RCP2CR-RCP2W RotaryType 0615 EngDocumento16 páginasRCP2CR-RCP2W RotaryType 0615 EngEstebanAún no hay calificaciones
- Modular Network 1 16-Axis Position Controller For RCP/RCA/RCD/RCS/IS (D) B/SSPA/NS (A) /DDADocumento36 páginasModular Network 1 16-Axis Position Controller For RCP/RCA/RCD/RCS/IS (D) B/SSPA/NS (A) /DDAEstebanAún no hay calificaciones
- Robonet Eng V2Documento12 páginasRobonet Eng V2EstebanAún no hay calificaciones
- DNV-RP-F101 - 1999 Corroded Pipelines (Desactualizado)Documento52 páginasDNV-RP-F101 - 1999 Corroded Pipelines (Desactualizado)EstebanAún no hay calificaciones
- vLocPro2 vLocML2 User Handbook VXMT Eng V2.0Publish 20191023 PDFDocumento81 páginasvLocPro2 vLocML2 User Handbook VXMT Eng V2.0Publish 20191023 PDFEstebanAún no hay calificaciones
- Rcs2-Rtc: Large Diameter Hollow Rotary Type RobocylinderDocumento8 páginasRcs2-Rtc: Large Diameter Hollow Rotary Type RobocylinderEstebanAún no hay calificaciones
- Modular Network 1 16-Axis Position Controller For RCP/RCA/RCD/RCS/IS (D) B/SSPA/NS (A) /DDADocumento36 páginasModular Network 1 16-Axis Position Controller For RCP/RCA/RCD/RCS/IS (D) B/SSPA/NS (A) /DDAEstebanAún no hay calificaciones
- RCP2CR-RCP2W RotaryType 0615 EngDocumento16 páginasRCP2CR-RCP2W RotaryType 0615 EngEstebanAún no hay calificaciones
- SSPC PA5 - 2009 Guide To Maintenance Coating of Steel Structures in Atmospheric ServiceDocumento12 páginasSSPC PA5 - 2009 Guide To Maintenance Coating of Steel Structures in Atmospheric ServiceEstebanAún no hay calificaciones
- Technology Update No. 3: SSPC: The Society For Protective CoatingsDocumento11 páginasTechnology Update No. 3: SSPC: The Society For Protective CoatingsAlejandro 20100% (1)
- ImpulseRadar CrossPoint User Manual v2.2 (6 Mar 2018)Documento24 páginasImpulseRadar CrossPoint User Manual v2.2 (6 Mar 2018)EstebanAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- GPS Data Transfer Catalog 4 PDFDocumento1 páginaGPS Data Transfer Catalog 4 PDFpraveshkafleAún no hay calificaciones
- 190-01007-03 0B WebDocumento418 páginas190-01007-03 0B WebPeter Dostoe NeminAún no hay calificaciones
- Sunshine SUN: User and Installation Guide Manuale D'uso e D'installazioneDocumento126 páginasSunshine SUN: User and Installation Guide Manuale D'uso e D'installazioneMassimo ArdoinoAún no hay calificaciones
- Problem Set 1Documento17 páginasProblem Set 1francheska ocampoAún no hay calificaciones
- Laseref V Micro IRS SMDocumento16 páginasLaseref V Micro IRS SMTihomir ZrinščakAún no hay calificaciones
- Positioning & Navigation SystemsDocumento42 páginasPositioning & Navigation SystemsNguyen Anh0% (1)
- Approach & Methodology of SurveyDocumento16 páginasApproach & Methodology of Surveyসেই ছেলেটিAún no hay calificaciones
- 3430 40plus ManualDocumento282 páginas3430 40plus ManualBenjamin Apaza IdmeAún no hay calificaciones
- JAERODocumento11 páginasJAEROFelipe CaixetaAún no hay calificaciones
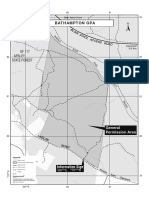
- SF 117 Apsley State Forest: Bathampton GpaDocumento1 páginaSF 117 Apsley State Forest: Bathampton Gpajeanada phillipsAún no hay calificaciones
- Car Overspeed Detection ProjectDocumento17 páginasCar Overspeed Detection Project2K20CO149 Disha BhatiAún no hay calificaciones
- Pesticide Spraying Agricultural Drone: BATCH - 1Documento20 páginasPesticide Spraying Agricultural Drone: BATCH - 1foap foapAún no hay calificaciones
- Anglais Technique GPSDocumento3 páginasAnglais Technique GPSMohamed BamhilAún no hay calificaciones
- 5G DocumentationDocumento12 páginas5G DocumentationNathan BilungaAún no hay calificaciones
- Journal of Geodynamics - R.grebenitcharskyDocumento18 páginasJournal of Geodynamics - R.grebenitcharskyRossen GrebenitcharskyAún no hay calificaciones
- Speed Management System Based On GPSDocumento10 páginasSpeed Management System Based On GPSInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- SAT-101 User Manual: Document No: MAN-0013 Issue No: 4 Dated: 24 Aug 2004Documento24 páginasSAT-101 User Manual: Document No: MAN-0013 Issue No: 4 Dated: 24 Aug 2004VM ServicesAún no hay calificaciones
- Faqs ResurveyDocumento14 páginasFaqs ResurveyRaghuAún no hay calificaciones
- Laudon Ess7 ch12 PDFDocumento20 páginasLaudon Ess7 ch12 PDFatharv bishtAún no hay calificaciones
- Real Time Vehicle Tracking Using ArduinoDocumento4 páginasReal Time Vehicle Tracking Using ArduinoBill CheimarasAún no hay calificaciones
- Meridian Gyrocompass System Manual Issue 2.0c Apr PDFDocumento76 páginasMeridian Gyrocompass System Manual Issue 2.0c Apr PDF'Egemen KayaAún no hay calificaciones
- Man User DARPS200 r6 PDFDocumento132 páginasMan User DARPS200 r6 PDFchristos1157Aún no hay calificaciones
- Adjustment of Survey Errors by Lest SquresDocumento8 páginasAdjustment of Survey Errors by Lest SqureskateborghiAún no hay calificaciones
- Personal Eye System (PES) by MIL SistemikaDocumento6 páginasPersonal Eye System (PES) by MIL SistemikaTwobirds Flying PublicationsAún no hay calificaciones
- Slip Rate Estimation of The Lembang Fault West Java From Geodetic ObservationDocumento7 páginasSlip Rate Estimation of The Lembang Fault West Java From Geodetic ObservationGilar GumelarAún no hay calificaciones
- Solar Portable GPS Tracker (JT600) - China Gps Tracker, Solar GPS, Solar Gps Tracker in GPSDocumento2 páginasSolar Portable GPS Tracker (JT600) - China Gps Tracker, Solar GPS, Solar Gps Tracker in GPSCecilia GrunauerAún no hay calificaciones
- Programming Manual: Part Number: 875-0125-002 Date: June 2005Documento136 páginasProgramming Manual: Part Number: 875-0125-002 Date: June 2005SergeyAún no hay calificaciones
- Monitoring A Position and Physical Parameters of Disabled Person Using GPS and Healthcare Sensors On Carriots PlatformDocumento5 páginasMonitoring A Position and Physical Parameters of Disabled Person Using GPS and Healthcare Sensors On Carriots PlatformIJRASETPublicationsAún no hay calificaciones
- Intelligent Vehicle Network™: Revision 1.2 March 4, 2011Documento26 páginasIntelligent Vehicle Network™: Revision 1.2 March 4, 2011Benny FelicianoAún no hay calificaciones
- Is GPS 200eDocumento185 páginasIs GPS 200eWhiz122Aún no hay calificaciones