También podría gustarte
- Csat 11Documento52 páginasCsat 11Mossad NewsAún no hay calificaciones
- Directed Energy WeaponsDocumento368 páginasDirected Energy WeaponsPete Santilli100% (1)
- Nonlethal Weapons and CapabilitiesDocumento74 páginasNonlethal Weapons and Capabilitiesbingwazzup100% (2)
- Non-Lethal Weaponry: Applications To Ac-130 GunshipsDocumento36 páginasNon-Lethal Weaponry: Applications To Ac-130 Gunshipsbingwazzup100% (1)
- The Invisible Third World War by W. H. Bowart and Richard SuttonDocumento35 páginasThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkAún no hay calificaciones
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocumento6 páginasAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Auditory Response To Pulsed Radiofrequency EnergyDocumento12 páginasAuditory Response To Pulsed Radiofrequency Energybingwazzup100% (1)
- Behavioral and Cognitive Effects of Microwave ExposureDocumento24 páginasBehavioral and Cognitive Effects of Microwave Exposurebingwazzup100% (1)
- Ip Multicast Part1Documento18 páginasIp Multicast Part1Pallab PalAún no hay calificaciones
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocumento26 páginasImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupAún no hay calificaciones
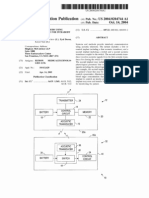
- Remote Mobile Monitoring and Communications Systems (US Patent # 5870029)Documento7 páginasRemote Mobile Monitoring and Communications Systems (US Patent # 5870029)bingwazzup100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocumento6 páginasModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeDocumento14 páginasThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearAún no hay calificaciones
- A Low-Cost Approach To FMCW Radar: Through-Wall Microwatt RadarDocumento28 páginasA Low-Cost Approach To FMCW Radar: Through-Wall Microwatt Radarbingwazzup100% (1)
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforDocumento12 páginasUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupAún no hay calificaciones
- DEW Electromagnetic SpectrumDocumento3 páginasDEW Electromagnetic SpectrumbingwazzupAún no hay calificaciones
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocumento10 páginasRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupAún no hay calificaciones
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocumento18 páginasApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupAún no hay calificaciones
- Aerial Laser ScanningDocumento244 páginasAerial Laser Scanningbingwazzup100% (1)
- The Radio Armateur Microwave Communications HandbookDocumento192 páginasThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Frequency Choice For Radio Telemetry: HF-vs-VHF-ConundrumDocumento7 páginasFrequency Choice For Radio Telemetry: HF-vs-VHF-Conundrumbingwazzup100% (1)
- An Overview of Acoustic TelemetryDocumento11 páginasAn Overview of Acoustic TelemetrybingwazzupAún no hay calificaciones
- Radio Direction FinderDocumento78 páginasRadio Direction Finderbingwazzup100% (1)
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocumento6 páginasAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocumento6 páginasModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocumento18 páginasApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupAún no hay calificaciones
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocumento26 páginasImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupAún no hay calificaciones
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocumento10 páginasRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupAún no hay calificaciones
- An Overview of Acoustic TelemetryDocumento11 páginasAn Overview of Acoustic TelemetrybingwazzupAún no hay calificaciones
- Infra SoundDocumento7 páginasInfra Soundbingwazzup100% (1)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Operating Instructions: Linde Fork Lift TruckDocumento96 páginasOperating Instructions: Linde Fork Lift TruckVictorAún no hay calificaciones
- Scorpius SRT 60 ROW Tracker DatasheetDocumento4 páginasScorpius SRT 60 ROW Tracker DatasheetPhani ArvapalliAún no hay calificaciones
- Chenchu Ramaiah Neti: Phone: +91-8970888117Documento3 páginasChenchu Ramaiah Neti: Phone: +91-8970888117chaitumdsAún no hay calificaciones
- Writing Samples (Student)Documento17 páginasWriting Samples (Student)Mahjabeen BashaAún no hay calificaciones
- RL & RC CircuitsDocumento59 páginasRL & RC CircuitsPhan Phuong NgocAún no hay calificaciones
- Build a 5W 40M CW TransmitterDocumento2 páginasBuild a 5W 40M CW TransmitterRicardo MorimAún no hay calificaciones
- 3rd Generation Computers: ExamplesDocumento5 páginas3rd Generation Computers: ExamplesQasim Jutt Jutt BhaiAún no hay calificaciones
- Method of Statement For The Construction and Completion of Structural Worksfor Entrances and Station Box at Conlay Station - 8.11.2018Documento39 páginasMethod of Statement For The Construction and Completion of Structural Worksfor Entrances and Station Box at Conlay Station - 8.11.2018Mamat XAún no hay calificaciones
- Best of SQL Server Central Vol 2Documento195 páginasBest of SQL Server Central Vol 2madhavareddy29100% (3)
- As 2067-1984 Switchgear Assemblies and Ancillary EquipmentDocumento56 páginasAs 2067-1984 Switchgear Assemblies and Ancillary EquipmentAnonymous EVFw59Aún no hay calificaciones
- Vol.1 (CH 00 - CH 31)Documento605 páginasVol.1 (CH 00 - CH 31)versineAún no hay calificaciones
- 0206 M Dars BrochureDocumento2 páginas0206 M Dars BrochureAlexanderPetrovAún no hay calificaciones
- ListDocumento6 páginasListKaren AmpeloquioAún no hay calificaciones
- Stud Finder Final v1Documento6 páginasStud Finder Final v1api-323825539Aún no hay calificaciones
- The Role of KM Portal in Indian Banking SectorDocumento9 páginasThe Role of KM Portal in Indian Banking SectorAbdul LathifAún no hay calificaciones
- UADSystem ProfileDocumento4 páginasUADSystem ProfileJohn WangAún no hay calificaciones
- SRM Engineering College attendance sheetDocumento2 páginasSRM Engineering College attendance sheetsachinAún no hay calificaciones
- 0092 Adobe Photoshop TutorialDocumento40 páginas0092 Adobe Photoshop TutorialAnandChhetriAún no hay calificaciones
- 5G Bootcamp Day 2-Building 5G System PDFDocumento18 páginas5G Bootcamp Day 2-Building 5G System PDFfjwoemcuAún no hay calificaciones
- Design and simulation of a 2x2 MIMO antenna system for IEEE 802.11a applicationsDocumento7 páginasDesign and simulation of a 2x2 MIMO antenna system for IEEE 802.11a applicationsValery ShevchenkoAún no hay calificaciones
- Module Week 7 - 8Documento13 páginasModule Week 7 - 8Maden betoAún no hay calificaciones
- Mazak Flex 1/3 RobotDocumento18 páginasMazak Flex 1/3 RobotRashedul HasanAún no hay calificaciones
- CHAPTER 5-Systems Development and Program Change Activities (1)Documento30 páginasCHAPTER 5-Systems Development and Program Change Activities (1)Trayle HeartAún no hay calificaciones
- Quick Start Operating Procedures MkiiiDocumento2 páginasQuick Start Operating Procedures MkiiiNopi EkoAún no hay calificaciones
- Auto Cad LabDocumento47 páginasAuto Cad Labiamav31Aún no hay calificaciones
- Unit 8Documento14 páginasUnit 8samer achkarAún no hay calificaciones
- Cyber-Security and Challenges Its Development in IndonesiaDocumento5 páginasCyber-Security and Challenges Its Development in IndonesiaNaila KamalikaAún no hay calificaciones
- Diagnostics - 2 On Board Diagnostics II SystemDocumento338 páginasDiagnostics - 2 On Board Diagnostics II SystemJoão Gabriel B AbrantesAún no hay calificaciones
- Barudan TESDocumento42 páginasBarudan TESMartinandKimberly RayAún no hay calificaciones
- GlobalRoamingRegsDocumento4 páginasGlobalRoamingRegsJonathan RiveraAún no hay calificaciones