También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Chap 7 Class 9 Physics NotesDocumento15 páginasChap 7 Class 9 Physics NotesMustafa Bin AmarAún no hay calificaciones
- KoneCranes Manuals 2182Documento45 páginasKoneCranes Manuals 2182PatrikAún no hay calificaciones
- Generator and MotorDocumento19 páginasGenerator and Motortrihandoko1631Aún no hay calificaciones
- 12th Physics - Practical - 2021 - 22 Term 1 Term 2Documento12 páginas12th Physics - Practical - 2021 - 22 Term 1 Term 2NAYAN DARYANIAún no hay calificaciones
- E5 Part IA Formal ReportDocumento15 páginasE5 Part IA Formal ReportbpmurtaAún no hay calificaciones
- Physics Ia IdeaDocumento2 páginasPhysics Ia Ideaoğuz hamurculuAún no hay calificaciones
- Three-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWDocumento26 páginasThree-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWCarlos Roberto Amaya Rodriguez100% (1)
- دفيوشن PDFDocumento3 páginasدفيوشن PDFحمامة السلامAún no hay calificaciones
- Assignment 1 (Total Marks: 70) EEE 323: Power System IIDocumento2 páginasAssignment 1 (Total Marks: 70) EEE 323: Power System IIShahriar SauravAún no hay calificaciones
- Ca Vcontact-Vsc (En S2) D 1VCP000532 PDFDocumento56 páginasCa Vcontact-Vsc (En S2) D 1VCP000532 PDFGustavo Rodrigo SantanaAún no hay calificaciones
- DSLP Dirct Srole Lightning ProtectionDocumento7 páginasDSLP Dirct Srole Lightning Protectiongsaiswaroopg100% (2)
- LM MCCB BrohureDocumento20 páginasLM MCCB BrohureMunavwar ProfessAún no hay calificaciones
- Study of Interfacial Area in Rectification of Two-Component MixturesDocumento7 páginasStudy of Interfacial Area in Rectification of Two-Component MixturesIJAR JOURNALAún no hay calificaciones
- Compact Substation KioskDocumento2 páginasCompact Substation Kiosk4usangeetAún no hay calificaciones
- Course Code: ES 110Documento38 páginasCourse Code: ES 110scolastica nyegaAún no hay calificaciones
- Vector-Addition-and-Resolution-Practice-Problems-1hy1kkj 1Documento3 páginasVector-Addition-and-Resolution-Practice-Problems-1hy1kkj 1AnvikshaAún no hay calificaciones
- LAB 5A Single Phase Current Transformer PDFDocumento6 páginasLAB 5A Single Phase Current Transformer PDFHumayun ArshadAún no hay calificaciones
- Science: Quarter 3 - Module 1Documento25 páginasScience: Quarter 3 - Module 1C VD50% (2)
- Separation Theory For Palmkernel and Shell MixtureDocumento8 páginasSeparation Theory For Palmkernel and Shell MixturekilankoAún no hay calificaciones
- SCR Electric Heater Application GuideDocumento6 páginasSCR Electric Heater Application GuideAbdurrahman MohamedAún no hay calificaciones
- Installation of Current Limiting Reactors in Esp: - Monday, June 07, 2021Documento15 páginasInstallation of Current Limiting Reactors in Esp: - Monday, June 07, 2021srmohapatra5086Aún no hay calificaciones
- Unit Rotational Spectra: StructureDocumento22 páginasUnit Rotational Spectra: Structureতুমি রবে নীরবেAún no hay calificaciones
- User's Guide: 450 SeriesDocumento31 páginasUser's Guide: 450 SeriesVijaya BhaskerAún no hay calificaciones
- Energy, Work & Power 09 QPDocumento10 páginasEnergy, Work & Power 09 QPRahat RizwanAún no hay calificaciones
- Terberg Operation Manual: Open Navigation MenuDocumento273 páginasTerberg Operation Manual: Open Navigation MenuaustinAún no hay calificaciones
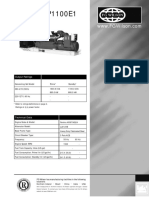
- P1000P1/P1100E1: Output RatingsDocumento4 páginasP1000P1/P1100E1: Output Ratingsmohsen_cumminsAún no hay calificaciones
- Course Outline: ABE 105 - AB Power EngineeringDocumento2 páginasCourse Outline: ABE 105 - AB Power EngineeringKaren Joy BabidaAún no hay calificaciones
- Guidelines On The Short Circuit Current Rating For Industrial Control Panels - SiemensDocumento20 páginasGuidelines On The Short Circuit Current Rating For Industrial Control Panels - SiemensHerman FinolAún no hay calificaciones
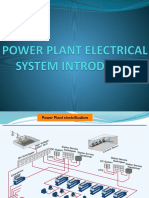
- Formation Plant Electrical SystemDocumento47 páginasFormation Plant Electrical SystemRakoto MalalaAún no hay calificaciones
- Thermal Expansion: Given: Required To Find: SolutionDocumento3 páginasThermal Expansion: Given: Required To Find: Solutionjo420Aún no hay calificaciones