También podría gustarte
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Guia Corte 3 FIEMDocumento6 páginasGuia Corte 3 FIEMNatalia BuitragoAún no hay calificaciones
- Investigacion Diodo TrabajoDocumento10 páginasInvestigacion Diodo TrabajoBds FranciscoAún no hay calificaciones
- Amplificador Operacional Ideal PDFDocumento7 páginasAmplificador Operacional Ideal PDFJonathan RomeroAún no hay calificaciones
- La ElectromovilidadDocumento9 páginasLa Electromovilidadronal berrocal castañedaAún no hay calificaciones
- Leyes Del ElectromagnetismoDocumento27 páginasLeyes Del ElectromagnetismoMiguel Ruíz Lira100% (1)
- 02 Plano - Panel PublicitarioDocumento1 página02 Plano - Panel Publicitarioficsa20100% (1)
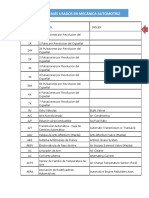
- Acrónimos Más Usados en Mecánica AutomotrizDocumento19 páginasAcrónimos Más Usados en Mecánica Automotrizoscar100% (1)
- Puente RectificadorDocumento3 páginasPuente RectificadorbrunoAún no hay calificaciones
- Tipos de RectificadoresDocumento2 páginasTipos de RectificadoresSanchez Hector100% (1)
- Circuitos Electricos en Dominio de La FrecuenciaDocumento16 páginasCircuitos Electricos en Dominio de La FrecuenciaJosé VallesAún no hay calificaciones
- TCDocumento10 páginasTCBenjamin Rafael Yoris MorilloAún no hay calificaciones
- Diferencia Entre Sistemas Digitales y Sistemas AnalógicosDocumento9 páginasDiferencia Entre Sistemas Digitales y Sistemas AnalógicosOscar Bartolo SabinoAún no hay calificaciones
- VoltimetroDocumento3 páginasVoltimetromarlblanco210% (1)
- Generacion TrifasicaDocumento9 páginasGeneracion TrifasicaErman Deimer Gutierrez SeguraAún no hay calificaciones
- Mantenimientos mayores transformadoresDocumento2 páginasMantenimientos mayores transformadoresJose BlancoAún no hay calificaciones
- Relaciones VirDocumento8 páginasRelaciones VirMarco Antonio Ortiz0% (1)
- Info Motores de InduccionDocumento7 páginasInfo Motores de InduccionLuis RamirezAún no hay calificaciones
- Sistema Eléctrico en Serie y ParaleloDocumento7 páginasSistema Eléctrico en Serie y ParaleloWilson Hanccocallo Usca100% (1)
- Otras Familias Lógicas de Circuitos IntegradosDocumento17 páginasOtras Familias Lógicas de Circuitos IntegradosRicardo Jarquin AndurayAún no hay calificaciones
- FuenteAlimentaciónVDCDocumento24 páginasFuenteAlimentaciónVDCmarcelin barboza parionaAún no hay calificaciones
- Tarea #2 de FlujoDocumento54 páginasTarea #2 de FlujoJose Antonio Borjas VillarroelAún no hay calificaciones
- Ejercicios MixtosDocumento5 páginasEjercicios MixtosMenyy JamezAún no hay calificaciones
- Instalaciones eléctricas: Historia, conceptos y componentesDocumento56 páginasInstalaciones eléctricas: Historia, conceptos y componentesLuis Zavala100% (1)
- Sistemas de Puesta A TierraDocumento5 páginasSistemas de Puesta A TierraAlex EdUu NúñezAún no hay calificaciones
- Voltimetro DigitalDocumento23 páginasVoltimetro DigitalCarlos AgudeloAún no hay calificaciones
- Manual PspiceDocumento98 páginasManual Pspicequienviva100% (1)
- Variables Internacionales Que Impactan en Su ProfesionDocumento7 páginasVariables Internacionales Que Impactan en Su ProfesionPabloCárdenasGAún no hay calificaciones
- Produccion Transp Electrica-AnayaDocumento18 páginasProduccion Transp Electrica-AnayaCesar Huamani MaytaAún no hay calificaciones
- Unidad 1 Electronica Analogica (Escritooo)Documento29 páginasUnidad 1 Electronica Analogica (Escritooo)danielAún no hay calificaciones
- Control Discreto Con ReleDocumento6 páginasControl Discreto Con ReleAlbert GarciaAún no hay calificaciones
- Unidad 2 Sistemas Electricos de PotenciaDocumento22 páginasUnidad 2 Sistemas Electricos de PotenciaMiguel AngelAún no hay calificaciones
- Efecto Piel en ElectricidadDocumento13 páginasEfecto Piel en ElectricidadDaniel AvecillaAún no hay calificaciones
- Partes de Un Motor de C.DDocumento5 páginasPartes de Un Motor de C.DGuillermo SánchezAún no hay calificaciones
- Tipos de Motores AC y DCDocumento10 páginasTipos de Motores AC y DCAlejandro TrejoAún no hay calificaciones
- Importancia del electromagnetismo en la sociedad modernaDocumento2 páginasImportancia del electromagnetismo en la sociedad modernaAlisson GutierrezAún no hay calificaciones
- Proyecto Final FuenteDocumento32 páginasProyecto Final FuenteKevin CruzAún no hay calificaciones
- Inductancia en Lineas TrifasicasDocumento5 páginasInductancia en Lineas TrifasicasJhonny Javier CasaAún no hay calificaciones
- Informe Previo #02: Facultad de Ingeniería Eléctrica Y ElectrónicaDocumento6 páginasInforme Previo #02: Facultad de Ingeniería Eléctrica Y ElectrónicaAley MarquezAún no hay calificaciones
- IMPUREZASDocumento14 páginasIMPUREZASHansSuarezCuevaAún no hay calificaciones
- Resonancia EléctricaDocumento4 páginasResonancia EléctricaRicardo AqpAún no hay calificaciones
- Alimentadores Acometidas y Caída de TensiónDocumento12 páginasAlimentadores Acometidas y Caída de TensiónJackie NikoleAún no hay calificaciones
- Ejemplos y Ejercicios ResueltosDocumento11 páginasEjemplos y Ejercicios ResueltospeagAún no hay calificaciones
- Conexiones TrifasicasDocumento24 páginasConexiones TrifasicasJose Manuel Miras LopezAún no hay calificaciones
- Definición de Un Circuito ResistivoDocumento3 páginasDefinición de Un Circuito Resistivowlen20120% (2)
- 3° Unidad de CuevasDocumento20 páginas3° Unidad de CuevasJose Antonio CruzAún no hay calificaciones
- Corriente de InrushDocumento9 páginasCorriente de Inrushbryan agredaAún no hay calificaciones
- Optoelectrónica. T1.1. Cuadro Comparativo.Documento5 páginasOptoelectrónica. T1.1. Cuadro Comparativo.Jose Aquino de La OAún no hay calificaciones
- Sistemas Secundarios de DistribucionDocumento11 páginasSistemas Secundarios de DistribucionLuz MartinezAún no hay calificaciones
- En Un Cable Trifásico No Tienes NeutroDocumento27 páginasEn Un Cable Trifásico No Tienes NeutroJose JaviAún no hay calificaciones
- Cargador de Bateria ProyectoDocumento13 páginasCargador de Bateria ProyectoJonathan Cervantes100% (2)
- Niveles de Proteccion de RedDocumento8 páginasNiveles de Proteccion de Redwalexx04Aún no hay calificaciones
- Fuente AlimentacionDocumento6 páginasFuente AlimentacionHermilo FebresAún no hay calificaciones
- Generadores SincronosDocumento13 páginasGeneradores SincronosAntonio IseaAún no hay calificaciones
- Características y tipos de relés de protección eléctricaDocumento1 páginaCaracterísticas y tipos de relés de protección eléctricaHunter Epic100% (1)
- Partes de Un Trasformador de PotenciaDocumento4 páginasPartes de Un Trasformador de PotenciaIvan SalazarAún no hay calificaciones
- Circuitos de Control ElectromagneticoDocumento6 páginasCircuitos de Control ElectromagneticoAiltonAún no hay calificaciones
- Impedancia serie de líneas de transmisiónDocumento34 páginasImpedancia serie de líneas de transmisiónJorge MaravillaAún no hay calificaciones
- Resumen Unidad 4 Convertidores DC/DCDocumento11 páginasResumen Unidad 4 Convertidores DC/DCAlex BanalexAún no hay calificaciones
- Tema 4-1Documento28 páginasTema 4-1eduardoAún no hay calificaciones
- Convertidores de Energia ElectricaDocumento21 páginasConvertidores de Energia ElectricaRubén MelgozaAún no hay calificaciones
- Variadores 3Documento19 páginasVariadores 3eddyaldochecaAún no hay calificaciones
- Jesus Emiro Gomez p1Documento1 páginaJesus Emiro Gomez p1jesus gomezAún no hay calificaciones
- QUIZ DE CALCULO MultivariadoDocumento1 páginaQUIZ DE CALCULO Multivariadojesus gomezAún no hay calificaciones
- GUIA LABORATOTIO DE ELECTRONICA POTENCIA v1Documento36 páginasGUIA LABORATOTIO DE ELECTRONICA POTENCIA v1jesus gomezAún no hay calificaciones
- Inversor 12 VDC A 120Documento13 páginasInversor 12 VDC A 120jesus gomezAún no hay calificaciones
- Artículos TC y TPDocumento7 páginasArtículos TC y TPjesus gomezAún no hay calificaciones
- ACFrOgC9lZATRrEzrJdnzyz309u8cOPZK luCorlW4jWWJV6d6S Wv0iihh3 57MqxFIY - JF9yIhoITz1VR - PMgIXfRE7yyQWuM5zFrGCqsGKTNk9oak0DBjMWjsiWNq4q2jPI0Z2x Vr9RptBpaDocumento3 páginasACFrOgC9lZATRrEzrJdnzyz309u8cOPZK luCorlW4jWWJV6d6S Wv0iihh3 57MqxFIY - JF9yIhoITz1VR - PMgIXfRE7yyQWuM5zFrGCqsGKTNk9oak0DBjMWjsiWNq4q2jPI0Z2x Vr9RptBpajesus gomezAún no hay calificaciones
- Taller de Calculo Multivariado v1 Ccordenadas PolaresDocumento19 páginasTaller de Calculo Multivariado v1 Ccordenadas Polaresjesus gomezAún no hay calificaciones
- Artículos TC y TPDocumento7 páginasArtículos TC y TPjesus gomezAún no hay calificaciones
- PIC16F887Documento5 páginasPIC16F887Carlos VazquezAún no hay calificaciones
- ATA 24 Electrical SystemDocumento14 páginasATA 24 Electrical SystemGonzalo SelmiAún no hay calificaciones
- 1.3 Diodo Rectificador - Qué Es, Funcionamiento y AplicacionesDocumento12 páginas1.3 Diodo Rectificador - Qué Es, Funcionamiento y AplicacionesGerman ArteagaAún no hay calificaciones
- Laboratorio 2 CaiiDocumento2 páginasLaboratorio 2 CaiiCHRISTIAN ROJAS HUAMANAún no hay calificaciones
- Practica 1Documento11 páginasPractica 1Cesar BetansosAún no hay calificaciones
- Ficha EySer No. 16Documento1 páginaFicha EySer No. 16Felipe FarfanAún no hay calificaciones
- Consideraciones Generales para La Selección e Instalación de TransformadorDocumento2 páginasConsideraciones Generales para La Selección e Instalación de TransformadorSantiago OrdoñezAún no hay calificaciones
- RP-MAT5-K03 - Manual de Corrección 3Documento10 páginasRP-MAT5-K03 - Manual de Corrección 3Willyam CamavilcaAún no hay calificaciones
- Fuente regulable 1.25-15VDocumento31 páginasFuente regulable 1.25-15VJeffer Alexander Arbildo BalrodanoAún no hay calificaciones
- Cómo crear una página web para tu negocioDocumento12 páginasCómo crear una página web para tu negocioferalayonAún no hay calificaciones
- Rectificación onda media y completaDocumento2 páginasRectificación onda media y completaErnesto Ortiz PerdomoAún no hay calificaciones
- Guia # 3 Del Laboratorio de ElectronicaDocumento10 páginasGuia # 3 Del Laboratorio de ElectronicaLuis Hernandez MayorgaAún no hay calificaciones
- 3RH21401BG40 Datasheet EsDocumento5 páginas3RH21401BG40 Datasheet EsLuis AndresAún no hay calificaciones
- Filtros Pasa BandaDocumento9 páginasFiltros Pasa BandaPerfil CompumaggAún no hay calificaciones
- Precios Cuidado PersonalDocumento39 páginasPrecios Cuidado PersonalLibardo AriasAún no hay calificaciones
- Descargas Parciales y Su AplicacionDocumento72 páginasDescargas Parciales y Su Aplicacionmiamor$44Aún no hay calificaciones
- ANALISIS INTERRUPTOR CREPUSCULARDocumento21 páginasANALISIS INTERRUPTOR CREPUSCULARkaren castilloAún no hay calificaciones
- Taller 01 Mediciones Electricas Formacion ComplementariaDocumento3 páginasTaller 01 Mediciones Electricas Formacion Complementariafernando torregrozaAún no hay calificaciones
- Voltímetro Digital Con ArduinoDocumento9 páginasVoltímetro Digital Con Arduinojohan dominguezAún no hay calificaciones
- Proyecto Especifico Finca El Edén 1Documento55 páginasProyecto Especifico Finca El Edén 1Rafael DefexAún no hay calificaciones
- Tarea 2 - Sandy Guzman - 41Documento7 páginasTarea 2 - Sandy Guzman - 41sandyAún no hay calificaciones
- Solar Charge Controller Modelo Kw1220Documento1 páginaSolar Charge Controller Modelo Kw1220alejandroAún no hay calificaciones
- Informe 2 Recortadores y Cambiadores de NivelDocumento14 páginasInforme 2 Recortadores y Cambiadores de NivelSCAún no hay calificaciones
- Contenido Especificaciones de La Cámara: Guía de Inicio RápidoDocumento2 páginasContenido Especificaciones de La Cámara: Guía de Inicio RápidoYOBET NASARET NAVA MARINAún no hay calificaciones
- Diodo Zener 5Documento24 páginasDiodo Zener 5lalala99999Aún no hay calificaciones
- Practica 3 Electronica DigitalDocumento6 páginasPractica 3 Electronica DigitalALVARO RMZ.FLORESAún no hay calificaciones
- Compuertas Lógicas 21 - 1Documento14 páginasCompuertas Lógicas 21 - 1Lesly MorenoAún no hay calificaciones