También podría gustarte
- Alg 04 - DivisionAlgebraicaDocumento2 páginasAlg 04 - DivisionAlgebraicaviterickAún no hay calificaciones
- Micro Labo2Documento10 páginasMicro Labo2AndrésEduardoMartinezAún no hay calificaciones
- MICRO LABO2 ActualizadoDocumento12 páginasMICRO LABO2 ActualizadoAndrésEduardoMartinezAún no hay calificaciones
- TAREA2 CapaFisica CableadoEstructuradoDocumento14 páginasTAREA2 CapaFisica CableadoEstructuradoAndrésEduardoMartinezAún no hay calificaciones
- Rectificador industrial B6 semicontrolado 400Kw 3x440VDocumento2 páginasRectificador industrial B6 semicontrolado 400Kw 3x440VAndrésEduardoMartinezAún no hay calificaciones
- Floch Othacehe Nanotubes - Fr.esDocumento28 páginasFloch Othacehe Nanotubes - Fr.esAndrésEduardoMartinezAún no hay calificaciones
- Infore Final DigitalesDocumento8 páginasInfore Final DigitalesAndrésEduardoMartinezAún no hay calificaciones
- Laboratrorio 1 en Ing de Control - ArduinoDocumento2 páginasLaboratrorio 1 en Ing de Control - ArduinoMirko RamirezAún no hay calificaciones
- TAREA1 - Foro 1Documento6 páginasTAREA1 - Foro 1AndrésEduardoMartinezAún no hay calificaciones
- Convertidores DC-DCDocumento29 páginasConvertidores DC-DCAndrésEduardoMartinezAún no hay calificaciones
- TAREA1 - Foro 1Documento6 páginasTAREA1 - Foro 1AndrésEduardoMartinezAún no hay calificaciones
- Informe 4 Digitales Puertas Log e Implementacion - SilvaDocumento17 páginasInforme 4 Digitales Puertas Log e Implementacion - SilvaAndrésEduardoMartinezAún no hay calificaciones
- Micro Labo1Documento13 páginasMicro Labo1AndrésEduardoMartinezAún no hay calificaciones
- Ciclo ConvertidoresDocumento7 páginasCiclo ConvertidoresGerardo del BosqueAún no hay calificaciones
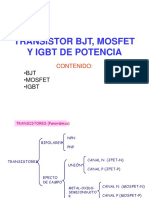
- Transistor BJT, Mosfet y Igbt de PotenciaDocumento22 páginasTransistor BJT, Mosfet y Igbt de PotenciaAndrésEduardoMartinezAún no hay calificaciones
- Examen Final - 20171 - G1Documento2 páginasExamen Final - 20171 - G1AndrésEduardoMartinezAún no hay calificaciones
- Tarea1 DiseñoDocumento4 páginasTarea1 DiseñoAndrésEduardoMartinezAún no hay calificaciones
- Padre Rico - ResumenDocumento6 páginasPadre Rico - ResumenAndrésEduardoMartinezAún no hay calificaciones
- Ciclo ConversoresDocumento52 páginasCiclo ConversoresAndrésEduardoMartinezAún no hay calificaciones
- Examen Sustitutorio 2015 - IIDocumento1 páginaExamen Sustitutorio 2015 - IICarlosVillavicencioGAún no hay calificaciones
- Tema 04 - Ejercicios de Ecuaciones en DiferenciasDocumento9 páginasTema 04 - Ejercicios de Ecuaciones en DiferenciasDanielAún no hay calificaciones
- Cambio 12 21Documento2 páginasCambio 12 21AndrésEduardoMartinezAún no hay calificaciones
- Simulacion Bolsa 2Documento4 páginasSimulacion Bolsa 2AndrésEduardoMartinezAún no hay calificaciones
- Laboratrorio 1 en Ing de Control - ArduinoDocumento1 páginaLaboratrorio 1 en Ing de Control - ArduinoYosselyn NombertoAún no hay calificaciones
- TIDocumento7 páginasTIRoller APAún no hay calificaciones
- Examen Final 2012Documento2 páginasExamen Final 2012Pablo Jesús Huapaya ChumpitazAún no hay calificaciones
- Cambio 12 21Documento2 páginasCambio 12 21AndrésEduardoMartinezAún no hay calificaciones
- Lab 1 Ing Control 1Documento4 páginasLab 1 Ing Control 1Yosselyn NombertoAún no hay calificaciones
- RNDocumento3 páginasRNAndrésEduardoMartinezAún no hay calificaciones
- RN 4Documento4 páginasRN 4AndrésEduardoMartinezAún no hay calificaciones
- 4 PDFDocumento5 páginas4 PDFSebastian CastroAún no hay calificaciones
- Multiplicación de Polinomios para Sexto de PrimariaDocumento4 páginasMultiplicación de Polinomios para Sexto de PrimariaLuis TorresAún no hay calificaciones
- Ejemplo Examen Resuelto Mates IIDocumento17 páginasEjemplo Examen Resuelto Mates IINoeliaAún no hay calificaciones
- A4 Distribucion NormalDocumento2 páginasA4 Distribucion NormalEduardo Castillo0% (1)
- Continuidad de Una Función en Un PuntoDocumento4 páginasContinuidad de Una Función en Un Puntonabla3dAún no hay calificaciones
- TALLER 2 ESTADISTICA DESCRIPTIVA MEDIDAS DE TENDENCIA CENTRAL BienDocumento4 páginasTALLER 2 ESTADISTICA DESCRIPTIVA MEDIDAS DE TENDENCIA CENTRAL BienKarla FigueroaAún no hay calificaciones
- Practica 1Documento2 páginasPractica 1Sarai Illanes CarataAún no hay calificaciones
- Movimiento ondulatorio y propagación de ondasDocumento2 páginasMovimiento ondulatorio y propagación de ondasStefanyAún no hay calificaciones
- Teoría de HacesDocumento7 páginasTeoría de HacesMauricio U VillanuevaAún no hay calificaciones
- Modelos Matematicos de Funciones AlgebraicasDocumento13 páginasModelos Matematicos de Funciones AlgebraicasLizzie Torres100% (1)
- 01 EM 06 EMAE U0 A4 Jhonathan HernandezDocumento5 páginas01 EM 06 EMAE U0 A4 Jhonathan Hernandezjhonthan hernandez de la cruzAún no hay calificaciones
- 2.4. Vectores Propios y Valores Propios 2Documento13 páginas2.4. Vectores Propios y Valores Propios 2Samuel DAún no hay calificaciones
- FUNCIONESDocumento19 páginasFUNCIONESJAVIERA IGNACIA GÓMEZAún no hay calificaciones
- Números Complejos Forma BinómicaDocumento57 páginasNúmeros Complejos Forma Binómicazahilys garciaAún no hay calificaciones
- Infinitesimales: cantidades infinitamente pequeñasDocumento3 páginasInfinitesimales: cantidades infinitamente pequeñasMUrrrrPHYAún no hay calificaciones
- Matrices Asociadas A GrafosDocumento25 páginasMatrices Asociadas A GrafosDuvier Alvarez33% (3)
- Examen final de Caminos UCV sobre diagramas de masa, curvas circulares, curvas verticales y cálculo de áreas y volúmenesDocumento6 páginasExamen final de Caminos UCV sobre diagramas de masa, curvas circulares, curvas verticales y cálculo de áreas y volúmenesJhoan's Sebastian Calderón ChávezAún no hay calificaciones
- Semana 3 MatematicasDocumento4 páginasSemana 3 MatematicasDANNY PAUCARAún no hay calificaciones
- SsFase 2 - Cuestionario 1 - Error y Ecuaciones No Lineales No CorregidaDocumento4 páginasSsFase 2 - Cuestionario 1 - Error y Ecuaciones No Lineales No Corregidanydam150% (2)
- Algebra LinealDocumento25 páginasAlgebra LinealJuan Carlos GebhardtAún no hay calificaciones
- Matrices: Definición, tipos y operacionesDocumento4 páginasMatrices: Definición, tipos y operacionesIgnacio AquinoAún no hay calificaciones
- Clase Función y CosxDocumento14 páginasClase Función y CosxGabrielaAún no hay calificaciones
- Formulariuo DerivadasDocumento1 páginaFormulariuo DerivadasmarkoagustinAún no hay calificaciones
- Pca Matemática 18-19 1º Bgu (1421)Documento10 páginasPca Matemática 18-19 1º Bgu (1421)Âlēx EspinosaAún no hay calificaciones
- Guia Matematica PolinomiosDocumento13 páginasGuia Matematica PolinomiosMarbec Beatriz Uzcategui MontillaAún no hay calificaciones
- Silabo Mate III 2022Documento9 páginasSilabo Mate III 2022Edber Salvador FloresAún no hay calificaciones
- Análisis de Simetría y Funciones SingularesDocumento33 páginasAnálisis de Simetría y Funciones SingularesChristian RománAún no hay calificaciones