También podría gustarte
- Práctica Calificada 2Documento8 páginasPráctica Calificada 2Gustavo La MadridAún no hay calificaciones
- Requisito JavaDocumento14 páginasRequisito JavaGustavo La MadridAún no hay calificaciones
- Estudios: Practicante de Ingeniería ElectrónicaDocumento2 páginasEstudios: Practicante de Ingeniería ElectrónicaGustavo La MadridAún no hay calificaciones
- Acta de Constitución Del Proyecto: FechaDocumento8 páginasActa de Constitución Del Proyecto: FechaGustavo La MadridAún no hay calificaciones
- Laboratorio Nro 1 - Amplificador DiferencialDocumento7 páginasLaboratorio Nro 1 - Amplificador DiferencialGustavo La Madrid100% (1)
- Laboratorio Calificado 3 de Redes 2Documento2 páginasLaboratorio Calificado 3 de Redes 2Gustavo La MadridAún no hay calificaciones
- Actividad 6.7.3 División en Subredes de Direcciones IPv4, Parte IDocumento4 páginasActividad 6.7.3 División en Subredes de Direcciones IPv4, Parte IKrmn AcAún no hay calificaciones
- Partes de La Tarjeta MadreDocumento4 páginasPartes de La Tarjeta MadreLorena Domitila Abad ViejóAún no hay calificaciones
- Intermedio NoiDocumento177 páginasIntermedio Noidoctora65Aún no hay calificaciones
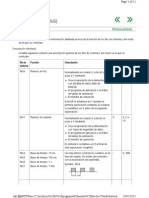
- Twido RegistrosInternos BitDocumento12 páginasTwido RegistrosInternos Bitcram606Aún no hay calificaciones
- Practica de Comandos BásicosDocumento2 páginasPractica de Comandos BásicosMendieta MayraAún no hay calificaciones
- Ensayo Sistemas de ArchivosDocumento5 páginasEnsayo Sistemas de ArchivosDaniel Acosta MonsalveAún no hay calificaciones
- How To Servidor de Terminales (LTSP)Documento33 páginasHow To Servidor de Terminales (LTSP)yohanna07Aún no hay calificaciones
- Windows Original Servipack3Documento4 páginasWindows Original Servipack3Janeth Hernandez MontanoAún no hay calificaciones
- Examen 2 Grado InformaticaDocumento4 páginasExamen 2 Grado InformaticaThelmaNolascoAún no hay calificaciones
- RED1 S07 PPT SubredesDocumento64 páginasRED1 S07 PPT SubredesRaúl AvAún no hay calificaciones
- Historia de Windows Todas Las VersionesDocumento31 páginasHistoria de Windows Todas Las VersionesMiky Silvestre Gonzales CalcinaAún no hay calificaciones
- TXSeries For Multiplatforms Guía de Instalación Versión 6.2Documento69 páginasTXSeries For Multiplatforms Guía de Instalación Versión 6.2deisecairoAún no hay calificaciones
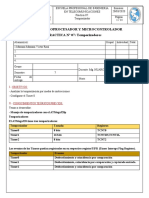
- Pra07 - Temporizadores (1) CompletoDocumento14 páginasPra07 - Temporizadores (1) CompletoVICTOR RAUL MAMANI MAMANIAún no hay calificaciones
- Sunde h4s EDocumento2 páginasSunde h4s EadiccbAún no hay calificaciones
- 1 Introduccion Al PythonDocumento7 páginas1 Introduccion Al PythonFreddy FnaAún no hay calificaciones
- ProtocolosDocumento12 páginasProtocolosMartin LoAún no hay calificaciones
- Tutorial XboxDocumento5 páginasTutorial XboxJuan KamiloAún no hay calificaciones
- Programando Microcontroladores Pic en Lenguaje CDocumento7 páginasProgramando Microcontroladores Pic en Lenguaje CCristhian Hurtado MelgarAún no hay calificaciones
- Watchdog TimerDocumento8 páginasWatchdog TimerChelsea Mitch DiazAún no hay calificaciones
- Control Del Puerto Paralelo Con Visual Basic 6.0Documento7 páginasControl Del Puerto Paralelo Con Visual Basic 6.0Pedro SánchezAún no hay calificaciones
- Dirip Udenv19Documento30 páginasDirip Udenv19Williams EspinozaAún no hay calificaciones
- Laboratorio 2.2.5Documento4 páginasLaboratorio 2.2.5drdaviidAún no hay calificaciones
- Linux EspeDocumento10 páginasLinux EspeCharlesAún no hay calificaciones
- Leng Ensamblador ISCDocumento196 páginasLeng Ensamblador ISCDulcelina González GirónAún no hay calificaciones
- Examen Desarrollado de LinuxDocumento16 páginasExamen Desarrollado de LinuxWilly Alberto Culqui BriceñoAún no hay calificaciones
- Circuitos Secuenciales / Biestables / Memorias /cpu Prueba Global (Modulos Iii Y Iv) 40%Documento9 páginasCircuitos Secuenciales / Biestables / Memorias /cpu Prueba Global (Modulos Iii Y Iv) 40%JuliAún no hay calificaciones
- La Mega Guía para Construirte Un PC Desde Cero en 2020Documento11 páginasLa Mega Guía para Construirte Un PC Desde Cero en 2020EstebanCastellanosBorreroAún no hay calificaciones
- 8088-8086-8087 Programación Ensamblador en Entorno MS DOS (Miguel Angel Rodriguez Rosello-Anaya-1987)Documento852 páginas8088-8086-8087 Programación Ensamblador en Entorno MS DOS (Miguel Angel Rodriguez Rosello-Anaya-1987)Francisco Javier Moreno RiveraAún no hay calificaciones
- Preguntas Del Libro Primer SemestreDocumento9 páginasPreguntas Del Libro Primer Semestreadelfo martínez martínezAún no hay calificaciones