También podría gustarte
- Ecuaciones Diferenciales Richard Bronson Coleccion Schaum Ccesa007Documento398 páginasEcuaciones Diferenciales Richard Bronson Coleccion Schaum Ccesa007Demetrio Ccesa RaymeAún no hay calificaciones
- PUD MATEMATICAS (1ro. BGU)Documento10 páginasPUD MATEMATICAS (1ro. BGU)Miguel Quinaluisa100% (1)
- Dibujo ArquitectónicoDocumento4 páginasDibujo ArquitectónicoluzAún no hay calificaciones
- Sistema Diedrico - Punto, Recta y PlanoDocumento24 páginasSistema Diedrico - Punto, Recta y PlanoOliver Carrasco Quinteiro100% (1)
- Dibujo Asistido Por Comp. ElectricaDocumento91 páginasDibujo Asistido Por Comp. ElectricaLogan RDAún no hay calificaciones
- Escalas Gráficas y NuméricasDocumento12 páginasEscalas Gráficas y NuméricasShanny Ch ArangoAún no hay calificaciones
- Dibujo Tecnico Ciclo Basico Parte 6Documento3 páginasDibujo Tecnico Ciclo Basico Parte 6AGUSTIN DIVISADEROAún no hay calificaciones
- Sistema Diedrico AbatimientosDocumento97 páginasSistema Diedrico AbatimientosVíctor Manuel Argüello BuzónAún no hay calificaciones
- Vistas AuxiliaresDocumento8 páginasVistas AuxiliaresKamila0Aún no hay calificaciones
- PDF Geometria Descriptiva Paso A Paso Repaired CompressDocumento60 páginasPDF Geometria Descriptiva Paso A Paso Repaired Compressholib22721Aún no hay calificaciones
- 15 - DT1 1Documento14 páginas15 - DT1 1Martin De JulianAún no hay calificaciones
- InversionDocumento8 páginasInversionGuadalupe Santiago100% (6)
- Tema 1. Instrumentos de D.T.Documento15 páginasTema 1. Instrumentos de D.T.LCalcinaCmcAún no hay calificaciones
- Actividad 14 - Conservacion de Momento LinealDocumento11 páginasActividad 14 - Conservacion de Momento LinealShanny Ch ArangoAún no hay calificaciones
- Programa Planos Arquitectonicos - OfeliaDocumento24 páginasPrograma Planos Arquitectonicos - OfeliaElohim Barraza Di WyvernAún no hay calificaciones
- Tema 2. Construcciones FundamentalesDocumento10 páginasTema 2. Construcciones Fundamentalesjesus gil100% (1)
- 01 - DT2Documento8 páginas01 - DT2Pablo FrancoAún no hay calificaciones
- 8448148886Documento18 páginas8448148886José Luis Mtz TrujilloAún no hay calificaciones
- 1 NormalizaciónDocumento49 páginas1 NormalizacióncarlosmarulandaAún no hay calificaciones
- Dibujo Industrial 2017 PDFDocumento9 páginasDibujo Industrial 2017 PDFBoris Dongo SalazarAún no hay calificaciones
- Metodos de Levantamiento TopograficosDocumento16 páginasMetodos de Levantamiento TopograficosShanny Ch ArangoAún no hay calificaciones
- Ejercicios de Trazados FundamentalesDocumento5 páginasEjercicios de Trazados FundamentalesM. Victoria López FernándezAún no hay calificaciones
- Tabla Integrales Inmediatas PDFDocumento1 páginaTabla Integrales Inmediatas PDFKarolay De Los SantosAún no hay calificaciones
- TM 1 Construcciones FundamentalesDocumento14 páginasTM 1 Construcciones FundamentalesLuis GAún no hay calificaciones
- Superficies CurvasDocumento17 páginasSuperficies CurvasPedro GarciaAún no hay calificaciones
- Propuesta Curricular Educacion TecnicaDocumento8 páginasPropuesta Curricular Educacion TecnicaEnzo Amaya100% (1)
- Monografia de Dibujo A Mano AlzadaDocumento24 páginasMonografia de Dibujo A Mano AlzadaJose Perez0% (1)
- Clase I - VistasDocumento24 páginasClase I - VistasJuliaDavi45Aún no hay calificaciones
- Normalización y AcotaciónDocumento4 páginasNormalización y AcotaciónDianaBerbecíaAún no hay calificaciones
- Escalas - Dibujo TécnicoDocumento5 páginasEscalas - Dibujo TécnicoElenitaGSAún no hay calificaciones
- Tipos de Escalas de ReducciónDocumento2 páginasTipos de Escalas de ReducciónEdwin MendozaAún no hay calificaciones
- Sencico DT s1. GeneralidadesDocumento25 páginasSencico DT s1. GeneralidadesPEDRO RAMÓN PATAZCA ROJASAún no hay calificaciones
- 5 - Paralelismo y Perpendicularidad Entre Rectas y PlanosDocumento9 páginas5 - Paralelismo y Perpendicularidad Entre Rectas y PlanosTaty De FlorezAún no hay calificaciones
- El PuntoDocumento118 páginasEl PuntoJosé Alonso BravoAún no hay calificaciones
- Plan de Dibujo Décimo EgbDocumento12 páginasPlan de Dibujo Décimo EgbMario Martinez LuzuriagaAún no hay calificaciones
- Uso de Escala Gráfica en Planos - Salcedo PDFDocumento13 páginasUso de Escala Gráfica en Planos - Salcedo PDFelvisnolasco100% (1)
- DIBUJO TÉCNICO - Modelo 2012-2013Documento10 páginasDIBUJO TÉCNICO - Modelo 2012-2013poetasAún no hay calificaciones
- Prog2bach Dibujo Tecnico IIDocumento21 páginasProg2bach Dibujo Tecnico IIHenryPerezAún no hay calificaciones
- Dibujo Tecnico 3ro C - D TTDocumento14 páginasDibujo Tecnico 3ro C - D TTAgus AgusAún no hay calificaciones
- Geometría Descriptiva El PuntoDocumento118 páginasGeometría Descriptiva El PuntoJesus Chacchi RamosAún no hay calificaciones
- Silabo de Dibujo de Planos III Semestre PDFDocumento3 páginasSilabo de Dibujo de Planos III Semestre PDFCain Puelles ChavezAún no hay calificaciones
- Ejercicios Libro Dibujo Tecnico I 2014Documento32 páginasEjercicios Libro Dibujo Tecnico I 2014César YagüeAún no hay calificaciones
- Webs Temas Dibujo TcnicoDocumento41 páginasWebs Temas Dibujo Tcnico61524jlAún no hay calificaciones
- Dibujo TecnicoIIJun05-06Documento10 páginasDibujo TecnicoIIJun05-06Leonard Carrasco Adrián100% (1)
- Examen Selectividad Dibujo Técnico II de Castilla-La Mancha Convocatoria Extraordinaria de 2020Documento2 páginasExamen Selectividad Dibujo Técnico II de Castilla-La Mancha Convocatoria Extraordinaria de 2020ana salAún no hay calificaciones
- Sílabo de Geometría Descriptiva 2020-20Documento5 páginasSílabo de Geometría Descriptiva 2020-20Franklin Taipe MañuicoAún no hay calificaciones
- Dibujo de Planos ArquitectonicosDocumento2 páginasDibujo de Planos ArquitectonicosGabriel CristaldoAún no hay calificaciones
- Silabo Dibujo TecnicoDocumento4 páginasSilabo Dibujo Tecnicojuanky079Aún no hay calificaciones
- Selectividad Dibujo TecnicoDocumento6 páginasSelectividad Dibujo TecnicoCristian Fernandez SantamariaAún no hay calificaciones
- Recomendaciones para El Trazo de Líneas Con InstrumentosDocumento9 páginasRecomendaciones para El Trazo de Líneas Con InstrumentosAthlonXXI0% (1)
- TEMA 1 Trazados Fundamentales en El Plano 1ºbach 2015-2016 v03Documento27 páginasTEMA 1 Trazados Fundamentales en El Plano 1ºbach 2015-2016 v03Aquiles18100% (1)
- Tema 10 Poliedros Diedrico DirectoDocumento55 páginasTema 10 Poliedros Diedrico DirectoCarlos Sánchez100% (1)
- Guias DT y Cad - TableroDocumento72 páginasGuias DT y Cad - TableroElmer QuispeAún no hay calificaciones
- Ejercicio Completo Jarrn de Tangencias PDFDocumento79 páginasEjercicio Completo Jarrn de Tangencias PDFolman fernandezAún no hay calificaciones
- Practica de Autocad Civil 3dDocumento1 páginaPractica de Autocad Civil 3dJose Aquino DelgadoAún no hay calificaciones
- Manual Inventor V10Documento162 páginasManual Inventor V10Dante DavidAún no hay calificaciones
- Dibujo de EstructurasDocumento3 páginasDibujo de EstructurasJuan Carlos ZeusAún no hay calificaciones
- Proyecto CASETADocumento15 páginasProyecto CASETABrown GarateAún no hay calificaciones
- 2020-2 Ejercicio DiagnósticoDocumento4 páginas2020-2 Ejercicio DiagnósticoLazara AreizagaAún no hay calificaciones
- Proyección IsométricaDocumento4 páginasProyección Isométricaluis fernandoAún no hay calificaciones
- Teoría de La ProyecciónDocumento14 páginasTeoría de La ProyecciónDany EscobarAún no hay calificaciones
- 5 - Sistemas de ProyeccionDocumento51 páginas5 - Sistemas de ProyeccionAnonymous NqVfGFfZAún no hay calificaciones
- Dibujo Técnico PAU 2011 Junio. Castilla y León. Resuelto.Documento17 páginasDibujo Técnico PAU 2011 Junio. Castilla y León. Resuelto.Artista Multidisciplinar Ausín SáinzAún no hay calificaciones
- Proyecciones Ortogonales Isometricas 2Documento17 páginasProyecciones Ortogonales Isometricas 2Andrea Soto100% (1)
- Sist RepresentacionDocumento26 páginasSist RepresentacionJDaniel SanchezAún no hay calificaciones
- Teoria de Proyeciones PDFDocumento15 páginasTeoria de Proyeciones PDFShanny Ch ArangoAún no hay calificaciones
- Monografia de Comandos - SEMANA 07Documento15 páginasMonografia de Comandos - SEMANA 07Shanny Ch ArangoAún no hay calificaciones
- Equipos Topograficos - Investigación FormativaDocumento21 páginasEquipos Topograficos - Investigación FormativaShanny Ch ArangoAún no hay calificaciones
- Cinematica - Trabajo MonograficoDocumento11 páginasCinematica - Trabajo MonograficoShanny Ch ArangoAún no hay calificaciones
- Cinematica - Trabajo MonograficoDocumento11 páginasCinematica - Trabajo MonograficoShanny Ch ArangoAún no hay calificaciones
- Gestion de ProyectosDocumento16 páginasGestion de ProyectosShanny Ch ArangoAún no hay calificaciones
- Ecuaciones Paramétricas GeometríaDocumento3 páginasEcuaciones Paramétricas GeometríaTIRSO VILLEGASAún no hay calificaciones
- Vigo emDocumento69 páginasVigo emjpgv84Aún no hay calificaciones
- Fisica - 5to - Analisis VectorialDocumento8 páginasFisica - 5to - Analisis VectorialJunior Daygoro Navarro IpanaqueAún no hay calificaciones
- Algebra Lineal Trabajo FinalDocumento13 páginasAlgebra Lineal Trabajo FinalPaul SanzAún no hay calificaciones
- AlgebraDocumento7 páginasAlgebraPerez Moreno Francis LeonelaAún no hay calificaciones
- El Wronskiano El WronskianoDocumento8 páginasEl Wronskiano El WronskianoENCINES CORDOVA SANTA CRUZAún no hay calificaciones
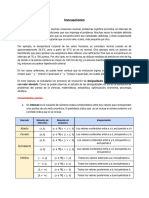
- Sistema de Inecuaciones de Primer Grado ExposicionDocumento2 páginasSistema de Inecuaciones de Primer Grado ExposicionAntonio Ulloa TorresAún no hay calificaciones
- Función Lineal y AfínDocumento13 páginasFunción Lineal y AfínCesar Simon ReyesAún no hay calificaciones
- Potencias de Base Entera y Exponente NaturalDocumento3 páginasPotencias de Base Entera y Exponente NaturalLaura Del Pino OchoaAún no hay calificaciones
- Modulo 7 Derivada de Una Funcion Ejercicios Libro de Oteyza, ElenaDocumento23 páginasModulo 7 Derivada de Una Funcion Ejercicios Libro de Oteyza, Elenasergh0230% (1)
- Platica Ing PalomeraDocumento32 páginasPlatica Ing PalomeraAlberto CastroAún no hay calificaciones
- PM C14 DesigualdadesDocumento13 páginasPM C14 DesigualdadesDana García PootAún no hay calificaciones
- Transformada de FourierDocumento8 páginasTransformada de Fourierkvicho1Aún no hay calificaciones
- MAT 2.2. Cuádricas en El Proyectivo (Castellón, UMA)Documento45 páginasMAT 2.2. Cuádricas en El Proyectivo (Castellón, UMA)elduqueeconomicoAún no hay calificaciones
- Guía 5 Cálculo DiferencialDocumento6 páginasGuía 5 Cálculo DiferencialCarlos PachecoAún no hay calificaciones
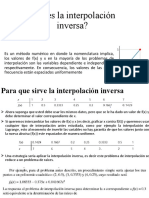
- InterpolaciónDocumento10 páginasInterpolaciónCristhian Edward Torres LoayzaAún no hay calificaciones
- Tema 3.3 Funciones EspecialesDocumento14 páginasTema 3.3 Funciones EspecialesYamile AdrianzenAún no hay calificaciones
- 4to A - Matemática - Prof - Katerinne - García - DESARROLLO - Guía - N°1Documento8 páginas4to A - Matemática - Prof - Katerinne - García - DESARROLLO - Guía - N°1KATERINNE LESLIE GARCIA OJEDAAún no hay calificaciones
- 1 - Reunion4 - EVDocumento9 páginas1 - Reunion4 - EVNicolás DarnayAún no hay calificaciones
- Logaritmos PropiedadesDocumento14 páginasLogaritmos PropiedadesCARLO VARGAS GONZALEZ100% (1)
- Tarea 06 CalculoDocumento8 páginasTarea 06 CalculoradhamesAún no hay calificaciones
- 2.2.1.1 TrigonometriaDocumento7 páginas2.2.1.1 TrigonometriaRafaél J MalaveAún no hay calificaciones
- Hoja de Ejercicios 05 SoluciónDocumento11 páginasHoja de Ejercicios 05 SoluciónShitzotAún no hay calificaciones
- Practica 06: Ejercicio 01Documento6 páginasPractica 06: Ejercicio 01Paul MallquiAún no hay calificaciones