También podría gustarte
- Informe RTKDocumento11 páginasInforme RTKDaniel Pirapi Vargas100% (5)
- Informe Gps DiferencialDocumento25 páginasInforme Gps Diferencialjimantho100% (1)
- Informe Tecnico de Levantamiento de Terreno Con GPS-UNIDocumento17 páginasInforme Tecnico de Levantamiento de Terreno Con GPS-UNICristian HO0% (2)
- Informe de Topografía Febrero 2021Documento19 páginasInforme de Topografía Febrero 2021ADHERLY JUAN MANUEL ADRIANZEN VÁSQUEZAún no hay calificaciones
- Levantamiento TopograficoDocumento6 páginasLevantamiento TopograficoGumercindo Salas PumapilloAún no hay calificaciones
- Topografía convencional vs fotogrametría con dronesDocumento37 páginasTopografía convencional vs fotogrametría con dronesEmmanuel TerronesAún no hay calificaciones
- Sistema de referencia geodésico PSAD-56 y proyección cartográfica UTMDocumento11 páginasSistema de referencia geodésico PSAD-56 y proyección cartográfica UTMGerardo Andres González Diaz0% (1)
- Informe TopograficoDocumento48 páginasInforme TopograficoJuan Diego Estrada AcostaAún no hay calificaciones
- Presentacion de GPSDocumento24 páginasPresentacion de GPSapi-3775762100% (1)
- Informe GpsDocumento18 páginasInforme GpsMiguel AngelAún no hay calificaciones
- Altimetria Satelital y MareografosDocumento8 páginasAltimetria Satelital y MareografosMSc Luis JimenezAún no hay calificaciones
- GPS DiferencialDocumento16 páginasGPS DiferencialRenzo GutierrezAún no hay calificaciones
- Conversión de Coordenadas Geográficas A UTMDocumento5 páginasConversión de Coordenadas Geográficas A UTMJosue CarrasqueroAún no hay calificaciones
- Topografia General Levantamiento Con Gps DiferencialDocumento14 páginasTopografia General Levantamiento Con Gps DiferencialRMCAún no hay calificaciones
- Tipos de Levantamiento Con Gps DiferencialDocumento10 páginasTipos de Levantamiento Con Gps DiferencialChardin Castillo QuispeAún no hay calificaciones
- Levantamiento Topografico Con GPS Navegador Parque Los ÁlamosDocumento15 páginasLevantamiento Topografico Con GPS Navegador Parque Los Álamosedison german ligas nina50% (2)
- Principios de La Fotointerpretación TopográficaDocumento6 páginasPrincipios de La Fotointerpretación TopográficaCarlos AcevedoAún no hay calificaciones
- Informe FotointerpretacionDocumento24 páginasInforme FotointerpretacionJuan Anderson Diaz AguilarAún no hay calificaciones
- ImágenesSatelitalesDocumento7 páginasImágenesSatelitaleslorenitag21Aún no hay calificaciones
- Delimitación y parámetros de cuencas con Global MapperDocumento9 páginasDelimitación y parámetros de cuencas con Global MapperJavier Yribarren MondejarAún no hay calificaciones
- Imagenes LandsatDocumento19 páginasImagenes LandsatSEBITAS 1Aún no hay calificaciones
- Informe de Levantamiento Topográfico de Un AeropuertoDocumento15 páginasInforme de Levantamiento Topográfico de Un AeropuertoAnderson Deneby VillacrizAún no hay calificaciones
- Efe Me RidesDocumento18 páginasEfe Me RidesArmandoTola100% (1)
- Informe de Nivelacion TopograficaDocumento7 páginasInforme de Nivelacion TopograficaJason WebbAún no hay calificaciones
- Informe de Hidrografia - SeccionamientoDocumento14 páginasInforme de Hidrografia - Seccionamientoalex martinezAún no hay calificaciones
- Levantamiento Catastral y Generación de La Información AlfanuméricaDocumento160 páginasLevantamiento Catastral y Generación de La Información AlfanuméricaCristian Huachohuillca Chilingano100% (1)
- Determinación de coordenadas geográficas astronómicasDocumento5 páginasDeterminación de coordenadas geográficas astronómicasJose Antonio Ortega ArancibiaAún no hay calificaciones
- GPS, Coordenadas Geograficas, UtmDocumento15 páginasGPS, Coordenadas Geograficas, UtmRichar Sempértegui DíazAún no hay calificaciones
- Delimitación de Cuenca Con ArcGISDocumento3 páginasDelimitación de Cuenca Con ArcGISERNESTO HUAMANI HUASPAAún no hay calificaciones
- Correccion Atmosferica - FLAASHDocumento11 páginasCorreccion Atmosferica - FLAASHjose alberto lara huapayaAún no hay calificaciones
- Astronomia GeodesicaDocumento15 páginasAstronomia GeodesicaLisbeth Sanjur50% (2)
- Sistema Global de Navegación Por Satelite (GNSS)Documento14 páginasSistema Global de Navegación Por Satelite (GNSS)Juan Pablo Andrade Acevedo100% (1)
- Imagenes SatelitalesDocumento14 páginasImagenes SatelitalesJhonat Ferré TorresAún no hay calificaciones
- Topografia 2Documento53 páginasTopografia 2felipe carhuallanquiAún no hay calificaciones
- INFORME TECNICO TopografiaDocumento19 páginasINFORME TECNICO TopografiaJean S'a0% (1)
- Métodos Topográficos en BatimetríaDocumento1 páginaMétodos Topográficos en BatimetríaRichard QuiZár33% (3)
- Manual de HIDROMETRIA BASICA PDFDocumento20 páginasManual de HIDROMETRIA BASICA PDFAquino C. ManuelAún no hay calificaciones
- IMAGENES SatelitalesDocumento21 páginasIMAGENES SatelitalesleonardbeltranAún no hay calificaciones
- Cartas NacionalesDocumento20 páginasCartas NacionalesMarco Antonio Ochoa Luis100% (1)
- Correccion de Imagenes SatelitalesDocumento12 páginasCorreccion de Imagenes SatelitalesgreisAún no hay calificaciones
- Manejo y Uso Del Gps Diferencial ImprimirDocumento4 páginasManejo y Uso Del Gps Diferencial Imprimirshermely100% (1)
- Funcion de La TeledeteccionDocumento36 páginasFuncion de La TeledeteccionSamuel FloresAún no hay calificaciones
- Gps DiferencialDocumento10 páginasGps DiferencialbryanAún no hay calificaciones
- Inf 1 - Procesamiento de Datos Obtenidos Con El GPS Diferencial en Opus GNSSDocumento17 páginasInf 1 - Procesamiento de Datos Obtenidos Con El GPS Diferencial en Opus GNSSRodrigo CastilloAún no hay calificaciones
- Coordenadas UTM y geográficas polígonoDocumento15 páginasCoordenadas UTM y geográficas polígonoRoy Huaman OncoyAún no hay calificaciones
- Fusion de Imágenes Satelitales Arc GisDocumento21 páginasFusion de Imágenes Satelitales Arc Gisdanielic12Aún no hay calificaciones
- Herramientas de Saga Gis en QGis para Análisis HidrológicoDocumento8 páginasHerramientas de Saga Gis en QGis para Análisis HidrológicoFranco Villacorta Carranza50% (2)
- Interpretación de Datos de LluviaDocumento2 páginasInterpretación de Datos de LluviaRubén Brandy Quiñones RamirezAún no hay calificaciones
- Introducción a la teledetección y procesamiento de imágenes satelitales con ENVIDocumento4 páginasIntroducción a la teledetección y procesamiento de imágenes satelitales con ENVIAnonymous N0r3UgNAún no hay calificaciones
- Historia de Los Intrumentos Topograficos y CartograficosDocumento21 páginasHistoria de Los Intrumentos Topograficos y CartograficosAda Pulido100% (1)
- Informe BATIMETRIADocumento27 páginasInforme BATIMETRIAArmando Alvarez Cardenas100% (1)
- 02 UTM PresentacionDocumento25 páginas02 UTM PresentacionChristian Cabrera CampoverdeAún no hay calificaciones
- Metodo Estatico GeodesiaDocumento24 páginasMetodo Estatico Geodesiasonia ticonaAún no hay calificaciones
- Acústica Marina PDFDocumento10 páginasAcústica Marina PDFKeishmer EstradaAún no hay calificaciones
- Sistema de Coordenadas Universal Transverse MercatorDocumento22 páginasSistema de Coordenadas Universal Transverse MercatorFrank Ordinola Lao80% (5)
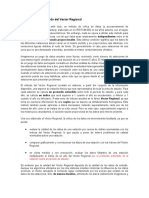
- Descripción Del Método Del Vector RegionalDocumento2 páginasDescripción Del Método Del Vector RegionalLuchin Huaman100% (3)
- Geodesia Marina - Altimetria1Documento7 páginasGeodesia Marina - Altimetria1MSc Luis JimenezAún no hay calificaciones
- TOPEX / Poseidón satélite revoluciona oceanografía con mediciones precisas del nivel del marDocumento8 páginasTOPEX / Poseidón satélite revoluciona oceanografía con mediciones precisas del nivel del marJJ Jeison Vasquez NavarroAún no hay calificaciones
- Altimetría JasonDocumento14 páginasAltimetría JasonMiguel Ángel DiazAún no hay calificaciones
- ENVISAT Satélite ambiental europeoDocumento21 páginasENVISAT Satélite ambiental europeoKatherine DiazAún no hay calificaciones
- INFORME TECNICO DE SALIDA DE CAMPO - FinalDocumento17 páginasINFORME TECNICO DE SALIDA DE CAMPO - FinalLedith saldaña sanchezAún no hay calificaciones
- Ev. Unidad2 Pueblos Originarios 2017Documento9 páginasEv. Unidad2 Pueblos Originarios 2017Alejandra NúñezAún no hay calificaciones
- Guia HidrosigDocumento13 páginasGuia Hidrosigjuanka842Aún no hay calificaciones
- Exploracion Mina San VicenteDocumento17 páginasExploracion Mina San VicentePedrin Cha OlivosAún no hay calificaciones
- Fic5 4Documento8 páginasFic5 4lito190307Aún no hay calificaciones
- RESOLUCIÓN N°04-2012-SNCP-CNC - Aprobacion Manuales Catastrales-Parte2 PDFDocumento174 páginasRESOLUCIÓN N°04-2012-SNCP-CNC - Aprobacion Manuales Catastrales-Parte2 PDFChristian A LCAún no hay calificaciones
- Instructivo Plano Catastral Zona No CatastradaDocumento0 páginasInstructivo Plano Catastral Zona No CatastradaJoseph RuizAún no hay calificaciones
- 05 APuentes-NBeccanDocumento66 páginas05 APuentes-NBeccanRafael PerczykAún no hay calificaciones
- Granulometrias de Suelos - MTCDocumento8 páginasGranulometrias de Suelos - MTCjuvenalmc79439Aún no hay calificaciones
- INFORME-BOMBAS-ALIMENTARIADocumento5 páginasINFORME-BOMBAS-ALIMENTARIACamilaMendizabalAún no hay calificaciones
- Trabajo y ExposicionDocumento17 páginasTrabajo y ExposicionAndy Lima ZuñigaAún no hay calificaciones
- Topografía Argelia Final-2.pdf PRELIMINARDocumento1 páginaTopografía Argelia Final-2.pdf PRELIMINARDaniel VillenasAún no hay calificaciones
- Tarea 1 TopografiaDocumento7 páginasTarea 1 TopografiaTatiana P. TamayoAún no hay calificaciones
- Santa Lucia Puno Medicion de CaudalDocumento40 páginasSanta Lucia Puno Medicion de CaudallayermanAún no hay calificaciones
- Representa la estructura de la TierraDocumento17 páginasRepresenta la estructura de la TierraUwer Carrión TorresAún no hay calificaciones
- Geometria SolarDocumento21 páginasGeometria SolarNicolasHinoAún no hay calificaciones
- Lista de Proyectos ExelDocumento24 páginasLista de Proyectos ExelLuis CondAún no hay calificaciones
- Vulcan IsmoDocumento19 páginasVulcan IsmojbadqAún no hay calificaciones
- Informe de Caminos - Trabajo GrupalDocumento47 páginasInforme de Caminos - Trabajo Grupalfredy quispe ccasaAún no hay calificaciones
- Introducción Implementación GisDocumento45 páginasIntroducción Implementación GisFrancisca Ivanovic TrejoAún no hay calificaciones
- Cuenca Del Rio PachacayoDocumento17 páginasCuenca Del Rio PachacayoKevin Orlando Galindo AntezanaAún no hay calificaciones
- GIS TerritorioDocumento11 páginasGIS TerritorioRaúl LozadaAún no hay calificaciones
- Examen de Geogarfia Bloque 3Documento2 páginasExamen de Geogarfia Bloque 3ramsdoceAún no hay calificaciones
- Geografia ExamenDocumento2 páginasGeografia ExamenMarcela Rodriguez SanchezAún no hay calificaciones
- Mejoramiento de la carretera CA-101: Informe final de trazo y diseño vialDocumento8 páginasMejoramiento de la carretera CA-101: Informe final de trazo y diseño vialViviana Coronel SilvaAún no hay calificaciones
- Modelos de Crecimiento UrbanoDocumento12 páginasModelos de Crecimiento UrbanoMiguel R MoAún no hay calificaciones
- Dise No ObraDocumento134 páginasDise No ObraRaul Bedoya HerediaAún no hay calificaciones
- VariadoDocumento44 páginasVariadoliriodiazAún no hay calificaciones
- 1 - Uso de Sistemas de Riego PresurizadoDocumento116 páginas1 - Uso de Sistemas de Riego PresurizadoAndrewHyunÁngelAlfaroIllescasAún no hay calificaciones
- Diseño de Un Sistema de Riego Por Microaspersión Automatizado para El Cultivo de GuanábanaDocumento13 páginasDiseño de Un Sistema de Riego Por Microaspersión Automatizado para El Cultivo de GuanábanaShadamJesusAún no hay calificaciones