También podría gustarte
- Catalogo ImcoDocumento10 páginasCatalogo ImcoCarlos Jair MarquezAún no hay calificaciones
- Adicional InvestigacionDocumento6 páginasAdicional InvestigacionAna García LópezAún no hay calificaciones
- Transcripción de Softwares Especializados para Ingeniería IndustrialDocumento7 páginasTranscripción de Softwares Especializados para Ingeniería IndustrialLuis Alberto Sanchez SubiaAún no hay calificaciones
- Clasificación residuos manejo especialDocumento2 páginasClasificación residuos manejo especialVictorGarciaAún no hay calificaciones
- HidraulicaDocumento97 páginasHidraulicaxeveregodoyAún no hay calificaciones
- SpanishTrainingManual PDFDocumento206 páginasSpanishTrainingManual PDFJuan José Matos Ch100% (3)
- Lecto EscrituraDocumento9 páginasLecto EscrituraYan In100% (3)
- El Hipertexto y La Teoría CritícaDocumento26 páginasEl Hipertexto y La Teoría CritícaJuan Manuel Zurita Sánchez100% (1)
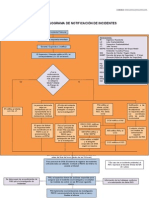
- Flujograma Notificación IncidentesDocumento1 páginaFlujograma Notificación IncidentesMiguel Soto EspinozaAún no hay calificaciones
- ISO 27001 2014.compressedDocumento27 páginasISO 27001 2014.compressedAlfredo MárquezAún no hay calificaciones
- Carretero y Castorina Desarrollo CognitivoDocumento12 páginasCarretero y Castorina Desarrollo CognitivoClaudia Rosanna OjedaAún no hay calificaciones
- Protocolo Taller Comprensión Lectora 2Documento4 páginasProtocolo Taller Comprensión Lectora 2milenaAún no hay calificaciones
- Caldera YCRTDocumento9 páginasCaldera YCRTOPISantaCruzAún no hay calificaciones
- MSDS SikaGrind 363Documento5 páginasMSDS SikaGrind 363Alex CristobalAún no hay calificaciones
- Introduccion A Garage Band 08Documento107 páginasIntroduccion A Garage Band 08b03ticAún no hay calificaciones
- Características Del Sistema de Archivos de Windows 8Documento7 páginasCaracterísticas Del Sistema de Archivos de Windows 8Juan José Rodríguez CetinaAún no hay calificaciones
- ElcosDocumento4 páginasElcosPablo Gaspar D'Agostini AmengualAún no hay calificaciones
- Oscar Palacios CV 2014Documento14 páginasOscar Palacios CV 2014OscarMPalaciosAún no hay calificaciones
- Terminología Control de CalidadDocumento24 páginasTerminología Control de CalidadJessica Paulina GAún no hay calificaciones
- Recur SoDocumento24 páginasRecur SoKevin MartinezAún no hay calificaciones
- Love CanalDocumento1 páginaLove CanalPaolaAún no hay calificaciones
- 3 SEM 6 Plan Mtro. Juan PabloDocumento11 páginas3 SEM 6 Plan Mtro. Juan PablojesusAún no hay calificaciones
- ArchivoDocumento45 páginasArchivoCarlos Gerardo MarínAún no hay calificaciones
- Manejo Del RatonDocumento3 páginasManejo Del Ratonjabel68Aún no hay calificaciones
- Curso de Planeamiento MinaDocumento13 páginasCurso de Planeamiento MinaEl Zurdo ObregonAún no hay calificaciones
- TAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoDocumento2 páginasTAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoJulissa FeijooAún no hay calificaciones
- Entrega 1 Proceso AdministrativoDocumento3 páginasEntrega 1 Proceso AdministrativoNatalia ChavarroAún no hay calificaciones
- Seguridad Ataques Redes PDFDocumento28 páginasSeguridad Ataques Redes PDFJonathan Ponce FouereAún no hay calificaciones
- Diferentes Significados Del Concepto de OrganizaciónDocumento7 páginasDiferentes Significados Del Concepto de OrganizaciónEsther Reyes0% (1)
- Ficha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeDocumento1 páginaFicha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeCamilo Milo100% (1)