También podría gustarte
- Frenado de Un Motor DCDocumento14 páginasFrenado de Un Motor DCFrancisco RamirezAún no hay calificaciones
- 1.2. PLC Ejercicios InicialesDocumento6 páginas1.2. PLC Ejercicios InicialessaulAún no hay calificaciones
- PRACTICA #3 Mando de Motor Desde 2 PuestosDocumento8 páginasPRACTICA #3 Mando de Motor Desde 2 PuestosSebas UgaldeAún no hay calificaciones
- Bombas de TornilloDocumento9 páginasBombas de TornilloAntonio LoraAún no hay calificaciones
- Construccion de Una Fuente de AlimentacionDocumento11 páginasConstruccion de Una Fuente de AlimentacionJoZue HotShotAún no hay calificaciones
- Emit Emit-420 FormatoalumnotrabajofinalDocumento11 páginasEmit Emit-420 FormatoalumnotrabajofinalPiero AquinoAún no hay calificaciones
- La Instruccion Marca: Mandos Por Controladores Logicos Programables IDocumento26 páginasLa Instruccion Marca: Mandos Por Controladores Logicos Programables ICesar Augusto Rodriguez FigueroaAún no hay calificaciones
- Configuración de Puertos USB FrontalesDocumento3 páginasConfiguración de Puertos USB FrontalesReynaldo JesusAún no hay calificaciones
- Prototipo de Proyecto PracticoDocumento17 páginasPrototipo de Proyecto PracticoNelson ZeceñaAún no hay calificaciones
- IGBTDocumento9 páginasIGBTFelixFFiestasPalaciosAún no hay calificaciones
- PLC Configuracion InternaDocumento14 páginasPLC Configuracion InternaGonzaloAún no hay calificaciones
- CocodrileDocumento12 páginasCocodrileapi-354942999Aún no hay calificaciones
- Control variador velocidad YaskawaDocumento11 páginasControl variador velocidad Yaskawajorge hernandezAún no hay calificaciones
- Semiconductores de Carburo de Silicio y Nitrata de GalioDocumento15 páginasSemiconductores de Carburo de Silicio y Nitrata de GalioJairo DavidAún no hay calificaciones
- Arranque de motores asíncronos trifásicosDocumento10 páginasArranque de motores asíncronos trifásicosAlbert Martinez100% (1)
- Arranque part winding: características y funcionamientoDocumento2 páginasArranque part winding: características y funcionamientosebastian sarmientoAún no hay calificaciones
- Mando neumático de cilindros mediante válvulasDocumento43 páginasMando neumático de cilindros mediante válvulasElkjaer Yuri CJAún no hay calificaciones
- Manual de Cosimir PDFDocumento37 páginasManual de Cosimir PDFManuel Ruiz RondoAún no hay calificaciones
- Informe FluidsimDocumento7 páginasInforme FluidsimDanny Urtecho PonteAún no hay calificaciones
- ElectroneumáticaDocumento4 páginasElectroneumáticaalanAún no hay calificaciones
- Robot RubikDocumento4 páginasRobot RubikM Sc Marco Antonio CancholaAún no hay calificaciones
- Diseño de Una Máquina Automatizada Empacadora de Líquidos en Bolsa para Las PYMESDocumento147 páginasDiseño de Una Máquina Automatizada Empacadora de Líquidos en Bolsa para Las PYMESyonathan ayquipa merinoAún no hay calificaciones
- Reutilización del agua de lluvia y luz de escánerDocumento16 páginasReutilización del agua de lluvia y luz de escánerPaul RomeroAún no hay calificaciones
- Programación PLC LenguajesDocumento5 páginasProgramación PLC LenguajesJorge Torres SantistebanAún no hay calificaciones
- Cartilla de Ejercicios PDFDocumento10 páginasCartilla de Ejercicios PDFmathiAún no hay calificaciones
- Control de motor a pasos con seguidor solar deDocumento13 páginasControl de motor a pasos con seguidor solar deAlvarez Tomas0% (1)
- Ejemplos de Programación LadderDocumento6 páginasEjemplos de Programación Laddercarloshugolety100% (1)
- Elementos de Un Servo DriveDocumento38 páginasElementos de Un Servo DriveHalamasSimon100% (1)
- Tipos de ChasisDocumento34 páginasTipos de ChasisRicardo Garcia100% (1)
- Tablero PLCDocumento19 páginasTablero PLCAlex Jahir NamizakeAún no hay calificaciones
- 12 Circuitos Con Termistores (Montajes) - SE186 PDFDocumento6 páginas12 Circuitos Con Termistores (Montajes) - SE186 PDFCambiando CaminosAún no hay calificaciones
- Bic01 - Introduccion A La ComputacionDocumento3 páginasBic01 - Introduccion A La ComputacionJuan Carlos Álvarez Salazar100% (1)
- Punto Neutro de Un Motor de Corriente ContinuaDocumento10 páginasPunto Neutro de Un Motor de Corriente Continuasarang100% (1)
- La Potencia y El Par Motor, Estudio Del Tren MotrizDocumento27 páginasLa Potencia y El Par Motor, Estudio Del Tren MotrizAlfredo VillarrealAún no hay calificaciones
- Capitulo 01 Los Automatas s7 314 IfmDocumento18 páginasCapitulo 01 Los Automatas s7 314 IfmJhonatan VargasAún no hay calificaciones
- Foro 1-4Documento4 páginasForo 1-4roy riverosAún no hay calificaciones
- Trabajo Final de ElectricidadDocumento8 páginasTrabajo Final de Electricidadbrayan estiven vilca ponceAún no hay calificaciones
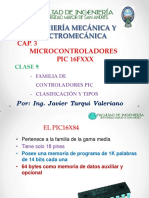
- Introducción a los Microcontroladores PIC16F8XX: Aplicaciones, Periféricos y Programación BásicaDocumento31 páginasIntroducción a los Microcontroladores PIC16F8XX: Aplicaciones, Periféricos y Programación BásicacarlosbuitronAún no hay calificaciones
- Rectificación de media onda no controlada con carga resistiva: análisis y cálculo de parámetrosDocumento8 páginasRectificación de media onda no controlada con carga resistiva: análisis y cálculo de parámetrosYeser HidalgoAún no hay calificaciones
- CTA BTP Electricidad 12mo Preliminar2020Documento104 páginasCTA BTP Electricidad 12mo Preliminar2020EnocSalgadoAún no hay calificaciones
- Trabajo Arduino FinalDocumento19 páginasTrabajo Arduino FinalAnderson MarkAún no hay calificaciones
- Tesis Motores BrushlessDocumento7 páginasTesis Motores BrushlessGuzmán Vilcatoma Suaznabar100% (2)
- Metodo CascadaDocumento7 páginasMetodo CascadaLuis Gerardo GonzalezAún no hay calificaciones
- Práctica 6 Led RGB Interactivo Con PulsadoresDocumento6 páginasPráctica 6 Led RGB Interactivo Con PulsadoresTranquilino Guzmán VázquezAún no hay calificaciones
- Semana 1Documento12 páginasSemana 1SEBASTIAN ACHURY GUEVARAAún no hay calificaciones
- InyectoraElectrohidráulica PDFDocumento8 páginasInyectoraElectrohidráulica PDFJuan DiazAún no hay calificaciones
- Lenguaje LadderDocumento5 páginasLenguaje LadderJavier R GarciaAún no hay calificaciones
- Motores Sincronicos de Reluctancia AsistDocumento12 páginasMotores Sincronicos de Reluctancia Asistgenaro caruzzo100% (1)
- Registrador variables eléctricas Arduino Ethernet HMIDocumento10 páginasRegistrador variables eléctricas Arduino Ethernet HMIfrentescuyAún no hay calificaciones
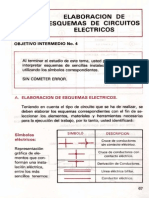
- Esquemas Circuitos ElectricosDocumento8 páginasEsquemas Circuitos Electricosjuanka842Aún no hay calificaciones
- Arranque Motor Shunt en Vacio Modificando Velocidad Con ReostatoDocumento3 páginasArranque Motor Shunt en Vacio Modificando Velocidad Con Reostatoomar chaustreAún no hay calificaciones
- Informe Buck BoostDocumento7 páginasInforme Buck BoostBoris Sebastian Toapanta JimenezAún no hay calificaciones
- Clase 9 El MICROCONTROLADOR - Familia PIC 16xxxDocumento28 páginasClase 9 El MICROCONTROLADOR - Familia PIC 16xxxMilton100% (2)
- Informe Fuente de VoltajeDocumento12 páginasInforme Fuente de VoltajeDaniel Sanchez100% (7)
- No Controlados Informe FinalDocumento24 páginasNo Controlados Informe FinalHugoTenedaAún no hay calificaciones
- Soluciones Materiales FerrososDocumento3 páginasSoluciones Materiales FerrososproggerAún no hay calificaciones
- Angel Cts 22Documento14 páginasAngel Cts 22Yulner Angel Huaman AriasAún no hay calificaciones
- Reporte Control de Velocidad Con Variador de Frecuencia Del Motor de InducciónDocumento8 páginasReporte Control de Velocidad Con Variador de Frecuencia Del Motor de InducciónMarko CAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- 9852 1882 05a Operators Instructions Simba 1257 CabinDocumento88 páginas9852 1882 05a Operators Instructions Simba 1257 CabinjuangomezsanAún no hay calificaciones
- Manual para EWCM4180Documento63 páginasManual para EWCM4180Fercho Ramone50% (2)
- Vibración en Turbinas de VaporDocumento8 páginasVibración en Turbinas de VaporJose HurtadoAún no hay calificaciones
- Confiabilidad TesisDocumento7 páginasConfiabilidad TesisJames CorisAún no hay calificaciones
- Efecto de Parámetros en Soldadura Por Haz de ElectronesDocumento6 páginasEfecto de Parámetros en Soldadura Por Haz de ElectronesNancyAún no hay calificaciones
- Tarea S4 - Fases Del ProyectoDocumento5 páginasTarea S4 - Fases Del ProyectoMILKER CONDORAún no hay calificaciones
- Columna de WinogradskyDocumento5 páginasColumna de WinogradskyGiovanni VidalAún no hay calificaciones
- Informe Practica ProfesionalDocumento39 páginasInforme Practica ProfesionalJulian PaezAún no hay calificaciones
- Presentacion Marcela Aravena PDFDocumento36 páginasPresentacion Marcela Aravena PDFfreeware freeAún no hay calificaciones
- 3.2 Deber PDFDocumento3 páginas3.2 Deber PDFpablo imbaAún no hay calificaciones
- Segunda Ley de La TermodinamicaDocumento12 páginasSegunda Ley de La TermodinamicaChucho Rdgz R0% (1)
- 1Documento6 páginas1OlgaPatyDíazBalcázarAún no hay calificaciones
- Tipos de embalajes y sus característicasDocumento15 páginasTipos de embalajes y sus característicasGLORIA EMIR VARGAS MARINAún no hay calificaciones
- Ambientes Sedimentarios MarinosDocumento8 páginasAmbientes Sedimentarios MarinosDavid Jonathan Aguilar PerezAún no hay calificaciones
- Cálculos intensidades corriente y caída tensiónDocumento3 páginasCálculos intensidades corriente y caída tensiónOmarAnibalGaitanPerez100% (1)
- Instrucciones de Trabajo 2 RevisadaDocumento1 páginaInstrucciones de Trabajo 2 RevisadaYuridia MartinezAún no hay calificaciones
- Operación de MezcladoDocumento5 páginasOperación de MezcladoMelissaMaraviAlvaradoAún no hay calificaciones
- Plantilla Senati 2023Documento12 páginasPlantilla Senati 2023Dieri Sanchez QuevedoAún no hay calificaciones
- ChuquicamataDocumento41 páginasChuquicamataYuyin Moscoso SorianoAún no hay calificaciones
- Intercambiador de Placas 2020Documento29 páginasIntercambiador de Placas 2020Angelica MeraAún no hay calificaciones
- Perdidas en bobinas de AC con nucleo de hierroDocumento3 páginasPerdidas en bobinas de AC con nucleo de hierroToro RamirezAún no hay calificaciones
- Castro LessaDocumento5 páginasCastro LessaIvan Chacon Palominos33% (3)
- Informe Rotura de BriquetasDocumento23 páginasInforme Rotura de BriquetasDavid Quispe CallañaupaAún no hay calificaciones
- Une-En 14879-1Documento40 páginasUne-En 14879-1Rossembert Laime MartinezAún no hay calificaciones
- Fichas Tecnicas InsumosDocumento16 páginasFichas Tecnicas InsumosNelson TorresAún no hay calificaciones
- Cartel LuminosopDocumento9 páginasCartel LuminosopLola MoraAún no hay calificaciones
- Tecnologia de Las Imegenes I (Resumen)Documento27 páginasTecnologia de Las Imegenes I (Resumen)Juan NuñezAún no hay calificaciones
- Instrumentacion 101228131343 Phpapp02Documento6 páginasInstrumentacion 101228131343 Phpapp02Josue Steven Paredes RiveraAún no hay calificaciones
- FLUIDOS-Power PointDocumento64 páginasFLUIDOS-Power PointEnrique Alberto MartinelliAún no hay calificaciones
- Marco Regulatorio Nacional de La BiocombustiblesDocumento17 páginasMarco Regulatorio Nacional de La BiocombustiblesDianaAún no hay calificaciones