También podría gustarte
- Cap2 Psicología de Los Grupos RAFAEL PRADADocumento6 páginasCap2 Psicología de Los Grupos RAFAEL PRADAcorpus delictiAún no hay calificaciones
- Referencias Bibliograficas Investigacionvii CicloDocumento5 páginasReferencias Bibliograficas Investigacionvii CicloMaría Teresa Angaspilco LozanoAún no hay calificaciones
- Receta de PostreDocumento25 páginasReceta de PostreYulianna EQ100% (1)
- Práctica 1 SMRCDocumento8 páginasPráctica 1 SMRCaprobamos todosAún no hay calificaciones
- Tolerancias Ejes ImpulsoresDocumento2 páginasTolerancias Ejes ImpulsoresjmeleAún no hay calificaciones
- Cálculo de Momentos y ReaccionesDocumento23 páginasCálculo de Momentos y ReaccionesAleco_CivilAún no hay calificaciones
- Lab 8 Mancha de OliensisDocumento6 páginasLab 8 Mancha de OliensisJuan Eyael Medrano CarrilloAún no hay calificaciones
- FT Acido Formico BasfDocumento2 páginasFT Acido Formico Basfedward contrerasAún no hay calificaciones
- Problemas en CatacaosDocumento5 páginasProblemas en CatacaosAlice Fiorella Pacheco Miñan0% (1)
- Informe Técnico #009 - 2020 (PLANEFA)Documento12 páginasInforme Técnico #009 - 2020 (PLANEFA)Dianthony LuisAún no hay calificaciones
- Trabajo Final Escrito Sobre Los Fundamentos Del CurriculumDocumento5 páginasTrabajo Final Escrito Sobre Los Fundamentos Del Curriculumclaudia montesAún no hay calificaciones
- Manual Bomba en EspañolDocumento7 páginasManual Bomba en EspañolIpesa Gases MedicinalesAún no hay calificaciones
- ENCUESTADocumento3 páginasENCUESTAAntonny Christofer QlAún no hay calificaciones
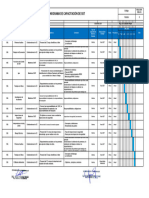
- 1.2 Cronogramade Capacitación de SST Cangallo OkDocumento1 página1.2 Cronogramade Capacitación de SST Cangallo OkclinthonAún no hay calificaciones
- Workingpaperyucabioeconomia Canalestrujillo Mayo21Documento30 páginasWorkingpaperyucabioeconomia Canalestrujillo Mayo21MANUEL alvarezAún no hay calificaciones
- PR - Montaje y Desmontaje MecánicoDocumento14 páginasPR - Montaje y Desmontaje Mecánicoclaudia100% (1)
- Fundamentación TeóricaDocumento5 páginasFundamentación TeóricaAlvaro Moyolema100% (1)
- Contenidos para La Evaluación de Docentes Optantes A Plaza Estrategias de EnseñanzaDocumento16 páginasContenidos para La Evaluación de Docentes Optantes A Plaza Estrategias de EnseñanzaFlint Sky God KAún no hay calificaciones
- Gc-Fo-Gc-007 Reporte Individual de Incidente o Evento Adverso PDFDocumento1 páginaGc-Fo-Gc-007 Reporte Individual de Incidente o Evento Adverso PDFjuan davidAún no hay calificaciones
- Sobre La Inevitabilidad de Lo Tragico (D) 3Documento9 páginasSobre La Inevitabilidad de Lo Tragico (D) 3Camilo E. Jacome A.Aún no hay calificaciones
- Bodegas 5 y 6 - Plano SanitarioDocumento1 páginaBodegas 5 y 6 - Plano SanitarioJose PradaAún no hay calificaciones
- RM 092 2014 Mem DMDocumento51 páginasRM 092 2014 Mem DMalarcon_figmmAún no hay calificaciones
- Copa de Vino. Historia.Documento11 páginasCopa de Vino. Historia.AdolfoSotoSaez100% (2)
- Teoria Del Aprendizaje Social de Albert BanduraDocumento9 páginasTeoria Del Aprendizaje Social de Albert BanduratuyopsonAún no hay calificaciones
- Transporte y MontajeDocumento20 páginasTransporte y MontajeAri RVAún no hay calificaciones
- Apicultura Introduccion Maravilloso Mundo Abejas 6022 CompletoDocumento24 páginasApicultura Introduccion Maravilloso Mundo Abejas 6022 CompletoSebastián CenturiónAún no hay calificaciones
- Informe PlasmodiumDocumento5 páginasInforme PlasmodiumKaren CorreaAún no hay calificaciones
- Hoja (Descripcion Botanica)Documento31 páginasHoja (Descripcion Botanica)Marco Antonio Tehuacatl100% (1)
- Infecciones de Tejidos BlandosDocumento11 páginasInfecciones de Tejidos BlandosGabo Bravo RodríguezAún no hay calificaciones
- Cruz Velarde, Jesus PDFDocumento55 páginasCruz Velarde, Jesus PDFAndi Soto PozoAún no hay calificaciones