También podría gustarte
- Teoría electromagnética para estudiantes de ingeniería: Notas de claseDe EverandTeoría electromagnética para estudiantes de ingeniería: Notas de claseCalificación: 4.5 de 5 estrellas4.5/5 (7)
- NFPA 58 - Codigo Del Gas Licuado de PetroleoDocumento10 páginasNFPA 58 - Codigo Del Gas Licuado de PetroleoLaurenCeciliaAraujoBayáAún no hay calificaciones
- Psicologia Social ApunteDocumento15 páginasPsicologia Social Apuntepsicologia_102100% (9)
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Fuerzas de Cuerpo y de SuperficieDocumento5 páginasFuerzas de Cuerpo y de SuperficieChucho Morales40% (5)
- Las BobinasDocumento16 páginasLas BobinasanterommxAún no hay calificaciones
- Magnitudes FundamentalesDocumento11 páginasMagnitudes Fundamentalesanon-16947682% (17)
- Planificación Anual Física 2 MedioDocumento1 páginaPlanificación Anual Física 2 MedioWinston Contuliano0% (1)
- 1 Guia de Indicadores de Practicas Pedagogicas Que Favorecen La Atencion A La Diversidad MEN OJODocumento82 páginas1 Guia de Indicadores de Practicas Pedagogicas Que Favorecen La Atencion A La Diversidad MEN OJO63515251100% (1)
- D) Informe - Impacto de Chorro Sobre SuperficiesDocumento28 páginasD) Informe - Impacto de Chorro Sobre SuperficiesMiguel Alejandro Diaz CastilloAún no hay calificaciones
- Informe psicológico pericialDocumento23 páginasInforme psicológico pericialOriana Castellanos100% (1)
- Sistema Internasional de UnidadesDocumento11 páginasSistema Internasional de UnidadesJuan Ramon Guzman ChavezAún no hay calificaciones
- Modulo I Unidades de MedidaDocumento9 páginasModulo I Unidades de MedidaFranko Encalada ValenciaAún no hay calificaciones
- El Sistema Internacional de Unidades Consta de Siete Unidades BásicasDocumento12 páginasEl Sistema Internacional de Unidades Consta de Siete Unidades Básicasresident80Aún no hay calificaciones
- Manual de Física General Temario #03 Libro de Fisica General OctubreDocumento7 páginasManual de Física General Temario #03 Libro de Fisica General OctubreCarlosAún no hay calificaciones
- Física General: Unidades, Mecánica, Energía y TermodinámicaDocumento90 páginasFísica General: Unidades, Mecánica, Energía y TermodinámicaMarcos M Quintero González0% (2)
- Sistema Internacional de MedidasDocumento7 páginasSistema Internacional de MedidasBryan RodriguezAún no hay calificaciones
- Guia Fisica 3er Año Con AsignacionesDocumento67 páginasGuia Fisica 3er Año Con AsignacionesEfrain CastellanosAún no hay calificaciones
- Sistema Internacional de Unidades Wikipedia)Documento12 páginasSistema Internacional de Unidades Wikipedia)danchuAún no hay calificaciones
- TERMODINAMICADocumento63 páginasTERMODINAMICARAQUEL1102Aún no hay calificaciones
- Sistema Internacional de UnidadesDocumento8 páginasSistema Internacional de UnidadesIvan TorresAún no hay calificaciones
- Ada 3Documento10 páginasAda 3miguelAún no hay calificaciones
- Magnitudes Primarias o FundamentalesDocumento6 páginasMagnitudes Primarias o FundamentalesEd BrauAún no hay calificaciones
- Sistema Internacional de MedidasDocumento7 páginasSistema Internacional de MedidasJose Igarza JotaAún no hay calificaciones
- Unidades Del SIDocumento2 páginasUnidades Del SIJulie EvansAún no hay calificaciones
- Tema 1 (T) Páginas EliminadasDocumento25 páginasTema 1 (T) Páginas EliminadasDokamAún no hay calificaciones
- Termodinámica: la ciencia de la energíaDocumento13 páginasTermodinámica: la ciencia de la energíaEdson Alejandro Valladares TaipeAún no hay calificaciones
- Sistema Internacional de UnidadesDocumento15 páginasSistema Internacional de UnidadesnataliaAún no hay calificaciones
- Sistema Internacional de UnidadesDocumento11 páginasSistema Internacional de UnidadesJose OsorioAún no hay calificaciones
- Unidades de medida S.IDocumento8 páginasUnidades de medida S.IjorgeAún no hay calificaciones
- Sistema Internacional de MedidasDocumento24 páginasSistema Internacional de MedidasGeovani GuinacAún no hay calificaciones
- Sistemas de Unidades y Factores de Conversion Introduccion Al GNDocumento9 páginasSistemas de Unidades y Factores de Conversion Introduccion Al GNRosandraBriceñoAún no hay calificaciones
- Monografia y Unidades de MedidaDocumento18 páginasMonografia y Unidades de MedidaAdam Vasquez0% (1)
- Ejemplos de Las Leyes de Newton en La Arquitectura CompressDocumento10 páginasEjemplos de Las Leyes de Newton en La Arquitectura CompressMoisés VasquezAún no hay calificaciones
- Sistema métrico unidadesDocumento15 páginasSistema métrico unidadesMaicol FlorezAún no hay calificaciones
- Sistema de Unidades ResumenDocumento8 páginasSistema de Unidades ResumenVane LopezAún no hay calificaciones
- Sistema Internacional de UnidadesDocumento15 páginasSistema Internacional de UnidadesTrinidad Collins ValdezAún no hay calificaciones
- Unidades Físicas de MediciónDocumento6 páginasUnidades Físicas de Mediciónantonio_vallejo_7Aún no hay calificaciones
- Sistema Internacional de UnidadesDocumento13 páginasSistema Internacional de UnidadesNycsAún no hay calificaciones
- Sistema internacional de medidas y unidades utilizadas en edificacionesDocumento18 páginasSistema internacional de medidas y unidades utilizadas en edificacionesAyl Greysi RodriguezAún no hay calificaciones
- Sistema Internacional de Unidades de MedidaDocumento7 páginasSistema Internacional de Unidades de MedidaMarcia QuinabandaAún no hay calificaciones
- Sistema InternacionalDocumento5 páginasSistema InternacionalLuis Quishpi YAún no hay calificaciones
- Unidades de MediciónDocumento14 páginasUnidades de MediciónTrasher Skate VizaelAún no hay calificaciones
- Introducción QUIMICADocumento23 páginasIntroducción QUIMICAJOSE TOBIAS CERQUERAAún no hay calificaciones
- Trabajo Monografico FisicaDocumento20 páginasTrabajo Monografico Fisicaskam20pe100% (1)
- Cantidades Físicas y Sistemas de Unidades Investigaciòn BrandonDocumento5 páginasCantidades Físicas y Sistemas de Unidades Investigaciòn BrandonBRANDON ULISES SANDOVAL ESTEVESAún no hay calificaciones
- La Septima Unidad Fundamental Es El MolDocumento3 páginasLa Septima Unidad Fundamental Es El MolManuel LopezAún no hay calificaciones
- Practica N 1 FiquiDocumento14 páginasPractica N 1 FiquiYesenia Vicente ParraAún no hay calificaciones
- Unidades SI derivadas nombres símbolosDocumento19 páginasUnidades SI derivadas nombres símbolosDiego CastelAún no hay calificaciones
- Sistema de UnidadesDocumento12 páginasSistema de UnidadesLarry Fernán Zapa BohórquezAún no hay calificaciones
- Unidades de La FisicaDocumento6 páginasUnidades de La FisicaARTURO_RASCON100% (2)
- Sistema Internacional de UnidadesDocumento37 páginasSistema Internacional de UnidadesComitl100% (3)
- SimelaDocumento3 páginasSimelaEl_GasistaAún no hay calificaciones
- Sistema Internacional de Unidades y Principales Unidades ElectricasDocumento6 páginasSistema Internacional de Unidades y Principales Unidades ElectricasMau PradoAún no hay calificaciones
- Conversiones y unidades SIDocumento65 páginasConversiones y unidades SIFranzyzko Marín100% (1)
- El Sintema InglesDocumento8 páginasEl Sintema InglesLo PosiBle Es PosibleAún no hay calificaciones
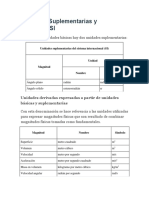
- Unidades Suplementarias y DerivadasDocumento5 páginasUnidades Suplementarias y DerivadasWilliams QM100% (1)
- Utilización Del Sistema InternacionalDocumento22 páginasUtilización Del Sistema InternacionalMauricio Nakamura CortezAún no hay calificaciones
- Unidades ElectronicaDocumento7 páginasUnidades ElectronicaByron Fernando Villarreal TapiaAún no hay calificaciones
- 1.4 Sistemas de Unidades y PatronesDocumento8 páginas1.4 Sistemas de Unidades y Patronesmel33% (3)
- Tipos de Magnitudes FisicasDocumento6 páginasTipos de Magnitudes FisicaswaldoartdjAún no hay calificaciones
- Sistema Internacional de UnidadesDocumento50 páginasSistema Internacional de UnidadesRichard QuiguangoAún no hay calificaciones
- Sistema de Unidades y ConstantesDocumento9 páginasSistema de Unidades y ConstantesThú Krììs Àtèrò Bn KóqúétóAún no hay calificaciones
- FF SilDocumento2 páginasFF SilFreeddyy Sthephano Carcasi ChipanaAún no hay calificaciones
- Control inhibitorio y flexibilidad cognitiva en niños víctimas del conflictoDocumento5 páginasControl inhibitorio y flexibilidad cognitiva en niños víctimas del conflictoOriana CastellanosAún no hay calificaciones
- Diapositivas Capacitacion OrganizacionalDocumento10 páginasDiapositivas Capacitacion OrganizacionalOriana CastellanosAún no hay calificaciones
- Apgar FamiliarDocumento2 páginasApgar FamiliarOriana CastellanosAún no hay calificaciones
- La personalidad: rasgos, procesos y determinantesDocumento17 páginasLa personalidad: rasgos, procesos y determinantesOriana CastellanosAún no hay calificaciones
- Unicef PDFDocumento21 páginasUnicef PDFOrianaAún no hay calificaciones
- Panorama Normativo de La Atención Educativa A La Población Con Discapacidad en ColombiaDocumento5 páginasPanorama Normativo de La Atención Educativa A La Población Con Discapacidad en ColombiaOriana CastellanosAún no hay calificaciones
- Ficha Educativa de DiscapacidadDocumento5 páginasFicha Educativa de DiscapacidadOriana CastellanosAún no hay calificaciones
- Principios Eticos BasicosDocumento3 páginasPrincipios Eticos BasicosOriana CastellanosAún no hay calificaciones
- Foro Familia RolesDocumento1 páginaForo Familia RolesOriana CastellanosAún no hay calificaciones
- Tercer Parcial Clinica ComportamentalDocumento23 páginasTercer Parcial Clinica ComportamentalOriana CastellanosAún no hay calificaciones
- Leyes líderes McDonald's KrocDocumento1 páginaLeyes líderes McDonald's KrocOriana CastellanosAún no hay calificaciones
- Examen final clínica humanistaDocumento3 páginasExamen final clínica humanistaOriana CastellanosAún no hay calificaciones
- BIOÉTICADocumento2 páginasBIOÉTICAOriana CastellanosAún no hay calificaciones
- Programa de BienestarDocumento9 páginasPrograma de BienestarOriana CastellanosAún no hay calificaciones
- Tema Unidad 5 FamiliaDocumento64 páginasTema Unidad 5 FamiliaOriana CastellanosAún no hay calificaciones
- FIlosofíaDocumento7 páginasFIlosofíaFaby Chen50% (2)
- Taller de AdiccionesDocumento3 páginasTaller de AdiccionesOriana CastellanosAún no hay calificaciones
- PIAR - Oferta GeneralDocumento14 páginasPIAR - Oferta GeneralOriana CastellanosAún no hay calificaciones
- sELECCION PERSONALDocumento4 páginassELECCION PERSONALOriana CastellanosAún no hay calificaciones
- Formatos Evaluacion de DesempeñoDocumento6 páginasFormatos Evaluacion de DesempeñoOriana CastellanosAún no hay calificaciones
- Ingeniería de TransporteDocumento15 páginasIngeniería de TransporteOriana CastellanosAún no hay calificaciones
- Redes e InstalacionesDocumento83 páginasRedes e InstalacionesOriana CastellanosAún no hay calificaciones
- Quimica OrganicaDocumento4 páginasQuimica OrganicaOriana CastellanosAún no hay calificaciones
- Ensayo GlobalizaciónDocumento3 páginasEnsayo GlobalizaciónOriana CastellanosAún no hay calificaciones
- Trabajo EscritoDocumento28 páginasTrabajo EscritoOriana CastellanosAún no hay calificaciones
- Desarrollo A Escala HumanaDocumento4 páginasDesarrollo A Escala HumanaOriana CastellanosAún no hay calificaciones
- Prueba - Fuerza 2Documento4 páginasPrueba - Fuerza 2Marcelo Zuñiga CastilloAún no hay calificaciones
- Planetario IPNDocumento4 páginasPlanetario IPNMAAMAún no hay calificaciones
- Laboratorio 6 - Suma de FuerzasDocumento9 páginasLaboratorio 6 - Suma de FuerzasJerónimo Alfonso QuintanaAún no hay calificaciones
- Fuerza resultante y leyes de Newton en el cuerpo humanoDocumento12 páginasFuerza resultante y leyes de Newton en el cuerpo humanoMartina Ornella Peralta MeriñoAún no hay calificaciones
- FisicaDocumento2 páginasFisicaJuan Ptrt100% (1)
- 2da Ley de NewtonDocumento8 páginas2da Ley de NewtonADAN TATATATAAún no hay calificaciones
- Otro 5 CapDocumento47 páginasOtro 5 CapEdie RodríguezAún no hay calificaciones
- Aportaciones de Santo Tomás de AquinoDocumento7 páginasAportaciones de Santo Tomás de AquinoHéctor Ernesto OrtízAún no hay calificaciones
- Problemas DinamicaDocumento7 páginasProblemas DinamicaEstefaniC160 LizAún no hay calificaciones
- Fisica Guia 4 Realizado+Documento8 páginasFisica Guia 4 Realizado+alexis rodriguezAún no hay calificaciones
- Resumen Sobre El Tema Leyes de NewtonDocumento6 páginasResumen Sobre El Tema Leyes de NewtonNathaliReyesAún no hay calificaciones
- Segunda Ley de NewtonDocumento7 páginasSegunda Ley de NewtonLaisha AvendañoAún no hay calificaciones
- Cinemática y Leyes de Newton en FísicaDocumento31 páginasCinemática y Leyes de Newton en FísicaAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Unidad 2 Paso 4Documento18 páginasUnidad 2 Paso 4Yadira Riaño RamirezAún no hay calificaciones
- Analisis Dimensional Conversion y VectoresDocumento20 páginasAnalisis Dimensional Conversion y VectoresFernando GarciaAún no hay calificaciones
- La Tercera Ley de NewtonDocumento7 páginasLa Tercera Ley de NewtonFiorella Ra100% (1)
- Guia 5 Corregida, Estatica y EquilibrioDocumento4 páginasGuia 5 Corregida, Estatica y EquilibriojosegavipiAún no hay calificaciones
- Garcia Aggi Javier - Tarea 3.1Documento6 páginasGarcia Aggi Javier - Tarea 3.1JAVIER GARCIA AGGIAún no hay calificaciones
- E1yRM Mod1 Fuerzas V1,0Documento69 páginasE1yRM Mod1 Fuerzas V1,0Alvarorrc. AquinoAún no hay calificaciones
- Ecuaciones diferenciales sistemas masa resorteDocumento2 páginasEcuaciones diferenciales sistemas masa resorteVictor Hdz100% (2)
- 9.estática IDocumento17 páginas9.estática IRodolfo Castro MirandaAún no hay calificaciones
- Unidad Didactica 5. Leyes de NewtonDocumento12 páginasUnidad Didactica 5. Leyes de NewtonEmily Alejandra Garrido ZerpaAún no hay calificaciones
- Trabajo Final Caf 1Documento19 páginasTrabajo Final Caf 1Fabrizio ChipocoAún no hay calificaciones
- VelocidadDocumento15 páginasVelocidadkarenAún no hay calificaciones
- Dinamica de FluidosDocumento156 páginasDinamica de FluidosFiorella VTAún no hay calificaciones
- Invariantes de Galileo en Sus Aspectos CinemáticosDocumento18 páginasInvariantes de Galileo en Sus Aspectos CinemáticosElena Llonch100% (1)
- Mecánica RacionalDocumento4 páginasMecánica RacionalYolandaAún no hay calificaciones