También podría gustarte
- Qué Importancia Tiene Los Sistemas de Automatización Neumática e Hidráulica Dentro de La Ingeniería ElectrónicaDocumento1 páginaQué Importancia Tiene Los Sistemas de Automatización Neumática e Hidráulica Dentro de La Ingeniería Electrónicaedith daniela inga ccenchoAún no hay calificaciones
- Sesión 1Documento32 páginasSesión 1edith daniela inga ccenchoAún no hay calificaciones
- Subestaciones Eléctricas de Distribución y Sus AccesoriosDocumento6 páginasSubestaciones Eléctricas de Distribución y Sus Accesoriosedith daniela inga ccenchoAún no hay calificaciones
- Trabajo 1Documento4 páginasTrabajo 1edith daniela inga ccenchoAún no hay calificaciones
- Canalizaciones ElectricasDocumento25 páginasCanalizaciones Electricasedith daniela inga ccenchoAún no hay calificaciones
- Trabajo 2Documento9 páginasTrabajo 2edith daniela inga ccenchoAún no hay calificaciones
- Antena Wifi A Largo AlcanceDocumento12 páginasAntena Wifi A Largo Alcanceedith daniela inga ccenchoAún no hay calificaciones
- Motores de CorrienteDocumento2 páginasMotores de Corrienteedith daniela inga ccenchoAún no hay calificaciones
- Canalizaciones ElectricasDocumento25 páginasCanalizaciones Electricasedith daniela inga ccenchoAún no hay calificaciones
- Conductores Eléctricos para Redes Secundarias y Sus AccesoriosDocumento12 páginasConductores Eléctricos para Redes Secundarias y Sus Accesoriosedith daniela inga ccenchoAún no hay calificaciones
- Tarea Fibra OpticaDocumento3 páginasTarea Fibra OpticaMax VelascoAún no hay calificaciones
- Trabajo 2Documento14 páginasTrabajo 2edith daniela inga ccenchoAún no hay calificaciones
- Propagación de la luz en mediosDocumento16 páginasPropagación de la luz en mediosLaignelet NicolleAún no hay calificaciones
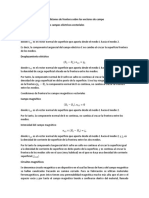
- Condiciones de Frontera Sobre Los Vectores de CampoDocumento3 páginasCondiciones de Frontera Sobre Los Vectores de Campoedith daniela inga ccenchoAún no hay calificaciones
- Circuito MagnéticoDocumento3 páginasCircuito Magnéticoedith daniela inga ccenchoAún no hay calificaciones
- Diseño de Enlaces OpticosDocumento3 páginasDiseño de Enlaces Opticosedith daniela inga ccenchoAún no hay calificaciones
- Tarea de Series y TransformadasDocumento1 páginaTarea de Series y Transformadasedith daniela inga ccenchoAún no hay calificaciones
- Series y TransformadasDocumento1 páginaSeries y Transformadasedith daniela inga ccenchoAún no hay calificaciones
- Informe de Laboratorio Circuito RCDocumento15 páginasInforme de Laboratorio Circuito RCedith daniela inga ccenchoAún no hay calificaciones
- Auto Induct An CIADocumento5 páginasAuto Induct An CIAedith daniela inga ccenchoAún no hay calificaciones
- AutoinductanciaDocumento5 páginasAutoinductanciaedith daniela inga ccencho100% (1)
- Tarea de Series y TransformadasDocumento1 páginaTarea de Series y Transformadasedith daniela inga ccenchoAún no hay calificaciones
- Diodo Zener y Sus AplicacionesDocumento6 páginasDiodo Zener y Sus Aplicacionesedith daniela inga ccenchoAún no hay calificaciones
- Trabajo de Mecanica de Fluidos II - 4m1-MecDocumento2 páginasTrabajo de Mecanica de Fluidos II - 4m1-MecMiguelRodriguezCalderonAún no hay calificaciones
- Bote SalvavidasDocumento6 páginasBote SalvavidasLuis Fernando HRAún no hay calificaciones
- Manual IVCDocumento146 páginasManual IVCSergio Romano PadillaAún no hay calificaciones
- PDF Calibracion Calibracion Transfer en CIA Volumetrica Nov 18 2004Documento21 páginasPDF Calibracion Calibracion Transfer en CIA Volumetrica Nov 18 2004Santiago HernandezAún no hay calificaciones
- 2.2.-Sint de Contr PidDocumento47 páginas2.2.-Sint de Contr PidAntoniParionaAstoAún no hay calificaciones
- Prueba de Efectividad de Calcinamiento en Carbonatos de ZincDocumento3 páginasPrueba de Efectividad de Calcinamiento en Carbonatos de ZincAri-zhaell PardoAún no hay calificaciones
- Compactacion - Arcilla InorganicaDocumento23 páginasCompactacion - Arcilla InorganicaJhonatan Paco TorrezAún no hay calificaciones
- Ejercicios Propuestos de VolumenDocumento7 páginasEjercicios Propuestos de VolumenLuisJose Vereau AguileraAún no hay calificaciones
- Tarea 2 - Flota 2 - Oficial CoteDocumento29 páginasTarea 2 - Flota 2 - Oficial CoteMariajose Matus CalabranoAún no hay calificaciones
- Sistema redundante de telecomunicaciones para Latacunga, Ambato y RiobambaDocumento210 páginasSistema redundante de telecomunicaciones para Latacunga, Ambato y RiobambaAngelika Vanessa ChambaAún no hay calificaciones
- La LuzDocumento23 páginasLa Luzkeila suarezAún no hay calificaciones
- Trabajo de Ciencia de MaterialesDocumento2 páginasTrabajo de Ciencia de MaterialespabloemilioAún no hay calificaciones
- Termodinámica: Leyes de los gases idealesDocumento17 páginasTermodinámica: Leyes de los gases idealesA01312078Aún no hay calificaciones
- Industria Del Cemento GGDocumento17 páginasIndustria Del Cemento GGDeyby Gutierrez SosaAún no hay calificaciones
- Compactacion de TerraplenesDocumento37 páginasCompactacion de TerraplenesYordifand100% (1)
- 1ejercicicos Rsueltos Prop Sustanc PurasDocumento18 páginas1ejercicicos Rsueltos Prop Sustanc PurasJESICAAún no hay calificaciones
- Componentes Diverso de Los EjesDocumento16 páginasComponentes Diverso de Los EjesmigarodAún no hay calificaciones
- Recomendaciones para Pilotos de ParapenteDocumento53 páginasRecomendaciones para Pilotos de ParapenteFabian MeschiniAún no hay calificaciones
- Capitulo 22 Apnb 777 PDFDocumento3 páginasCapitulo 22 Apnb 777 PDFelrojoerik100% (1)
- Informe Del Diagnostico Del Sistema Electrcio Del Vehiculo Tubular OkDocumento6 páginasInforme Del Diagnostico Del Sistema Electrcio Del Vehiculo Tubular OkCristian RodrigoAún no hay calificaciones
- Fluencia -Torsión y desgasteDocumento26 páginasFluencia -Torsión y desgasteJose Ross Zanet Fletcher67% (3)
- 2.1 EspejosDocumento32 páginas2.1 EspejosJosé Manuel Murillo DuarteAún no hay calificaciones
- INTE 06-02-10-08 (ASTM C42C 42M-04) Método de Ensayo para La Obtención y Ensayo de NúcleosDocumento14 páginasINTE 06-02-10-08 (ASTM C42C 42M-04) Método de Ensayo para La Obtención y Ensayo de NúcleosDannyChaconAún no hay calificaciones
- Laboratorio 8 de Electrotecnia IndustrialDocumento11 páginasLaboratorio 8 de Electrotecnia IndustrialAngelo Torres TerrerosAún no hay calificaciones
- Problemario Fisica 3 RespuestasDocumento43 páginasProblemario Fisica 3 RespuestasKirby Quintanilla0% (1)
- 120Documento2 páginas120Milagros Nicole Peralta GonzalesAún no hay calificaciones
- Interruptores Automaticos Con SF6 para GeneradoresDocumento8 páginasInterruptores Automaticos Con SF6 para GeneradoresFélix Martínez FernándezAún no hay calificaciones
- Unidad Dental Syncrus G8 FDocumento40 páginasUnidad Dental Syncrus G8 FJavier Farias VeraAún no hay calificaciones
- L3 - Transformadores TrifásicosDocumento11 páginasL3 - Transformadores TrifásicosGuillermo Huanes AlvanAún no hay calificaciones