También podría gustarte
- Herramientas Prácticas para Ser Locamente FelizDocumento160 páginasHerramientas Prácticas para Ser Locamente FelizAlfred Pessini100% (27)
- Sinfones - TR PDFDocumento46 páginasSinfones - TR PDFYorcys Gutiérrez100% (1)
- Problemas Tema 4Documento6 páginasProblemas Tema 4Alexander Lopez VillanuevaAún no hay calificaciones
- Qué Es La Carta de IntenciónDocumento7 páginasQué Es La Carta de Intenciónkerly_b94100% (1)
- Boletin Tecnico - Especi de Instalacion - Tuberia ADS N-12 - ASTM D2321!11!130920Documento1 páginaBoletin Tecnico - Especi de Instalacion - Tuberia ADS N-12 - ASTM D2321!11!130920MGCOOL14Aún no hay calificaciones
- INFORME Auditoria EN SISTEMAS DE GESTION CERTIFICABLESDocumento39 páginasINFORME Auditoria EN SISTEMAS DE GESTION CERTIFICABLESsebastian olivares100% (1)
- Heavy MetalDocumento15 páginasHeavy MetalIsrael Alberto Cortez VásquezAún no hay calificaciones
- Fo-Lc-66 Taller 1 Formato de InspecciónDocumento2 páginasFo-Lc-66 Taller 1 Formato de Inspecciónjairo enrique rodriguez florezAún no hay calificaciones
- Plantilla Avion Con BotellaDocumento2 páginasPlantilla Avion Con BotellaAlexander Lopez VillanuevaAún no hay calificaciones
- Bosquejo ReferencialDocumento1 páginaBosquejo ReferencialAlexander Lopez VillanuevaAún no hay calificaciones
- Espec Tecnica - PlanosDocumento5 páginasEspec Tecnica - PlanosAlexander Lopez VillanuevaAún no hay calificaciones
- Sigelec S.a.c.-3kvaDocumento1 páginaSigelec S.a.c.-3kvaAlexander Lopez VillanuevaAún no hay calificaciones
- Definicion Tecnologias EmergentesDocumento6 páginasDefinicion Tecnologias EmergentesAlexander Lopez Villanueva100% (1)
- Examen Sustitutorio UnmsmDocumento2 páginasExamen Sustitutorio UnmsmAlexander Lopez VillanuevaAún no hay calificaciones
- Pasos para Hacer Un Estudio de CasoDocumento3 páginasPasos para Hacer Un Estudio de CasoJosé Alfredo CarrilloAún no hay calificaciones
- DOFADocumento1 páginaDOFADIANAAún no hay calificaciones
- InformacionDocumento3 páginasInformacionJerry Meza AlminagordaAún no hay calificaciones
- Diseño Con Estructura Factorial de Factorial de TratamientosDocumento16 páginasDiseño Con Estructura Factorial de Factorial de TratamientosDianaAún no hay calificaciones
- Desarrollo Integral de La NaciónDocumento3 páginasDesarrollo Integral de La NaciónHelineth GonzalezAún no hay calificaciones
- Fin de Siglo: Construcción Del Mercado Ambiental Global: Una DadDocumento9 páginasFin de Siglo: Construcción Del Mercado Ambiental Global: Una DadLuis CastilloAún no hay calificaciones
- Liquidación de Sueldo FinalDocumento11 páginasLiquidación de Sueldo FinalMarilyn DiazAún no hay calificaciones
- Patente Ep2853801a1Documento10 páginasPatente Ep2853801a1Santiiago VEAún no hay calificaciones
- Procedimiento para Bloqueo de Equipos Energizados PDFDocumento11 páginasProcedimiento para Bloqueo de Equipos Energizados PDFMel PasacheAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 2 - Etapa 2 - Argumentación Disciplinar Sobre Pertinencia Del Trabajo de GradoDocumento8 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 2 - Etapa 2 - Argumentación Disciplinar Sobre Pertinencia Del Trabajo de GradoMateo Estrada EcheverriAún no hay calificaciones
- Gel AntibacterialDocumento52 páginasGel AntibacterialMartinAún no hay calificaciones
- Filtracion - GRUPO 1Documento25 páginasFiltracion - GRUPO 1Dennis Brn Rojas TrzAún no hay calificaciones
- Creer o Morir Capitulo 4Documento2 páginasCreer o Morir Capitulo 4Lalo ObrFarAún no hay calificaciones
- C6 - Calculo de FallasDocumento16 páginasC6 - Calculo de FallasEric MontecinosAún no hay calificaciones
- Enfoques de La EcologíaDocumento12 páginasEnfoques de La EcologíaAna Cecilia Siapo Tejada100% (2)
- D T MDocumento38 páginasD T MPedro Reynaldo Marin DominguezAún no hay calificaciones
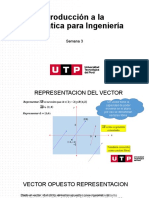
- 3.2 Representacion GeometricaDocumento10 páginas3.2 Representacion GeometricaAlda EspinozaAún no hay calificaciones
- Comentarios CGN Sellers' Inflation en Colombia VDDocumento7 páginasComentarios CGN Sellers' Inflation en Colombia VDLa Silla VacíaAún no hay calificaciones
- Bunge Carta A Una Aprendiza de EpistemologiaDocumento3 páginasBunge Carta A Una Aprendiza de Epistemologiaahaw100% (1)
- Caso Susana-Miedo A Conducir (Resuelto)Documento10 páginasCaso Susana-Miedo A Conducir (Resuelto)Manel EMAún no hay calificaciones
- CLASE 3 - Ecuacion Fundamental de La Hidrostatica - InstrumentosdemedidadelaspresionesDocumento27 páginasCLASE 3 - Ecuacion Fundamental de La Hidrostatica - InstrumentosdemedidadelaspresionesRodrigo GimenezAún no hay calificaciones
- LATAM - PPT Seminario PBN PDFDocumento14 páginasLATAM - PPT Seminario PBN PDFLuis HerediaAún no hay calificaciones
- OBJETIVO ANUAL POR AÑO DE ESCOLARIDAD (Nivel Secundario)Documento2 páginasOBJETIVO ANUAL POR AÑO DE ESCOLARIDAD (Nivel Secundario)César López AlbarracínAún no hay calificaciones