También podría gustarte
- Historia Del Mundo Antiguo. Proximo Oriente y Egipto. - Vázquez Hoys, A. M . (UNED, 2007) PDFDocumento720 páginasHistoria Del Mundo Antiguo. Proximo Oriente y Egipto. - Vázquez Hoys, A. M . (UNED, 2007) PDFMasabuelo100% (14)
- Diseño Por CorteDocumento4 páginasDiseño Por CorteDanNielAún no hay calificaciones
- Presas Sintetico SCS, EstabilidadDocumento21 páginasPresas Sintetico SCS, EstabilidadSantiago Díaz MontenegroAún no hay calificaciones
- Calculo de Precipitaciones MaximasDocumento35 páginasCalculo de Precipitaciones MaximasDanNielAún no hay calificaciones
- Nuevo ExamenDocumento15 páginasNuevo ExamenDanNielAún no hay calificaciones
- Introduccion A La Ingenieria de Presas-Mej.2Documento49 páginasIntroduccion A La Ingenieria de Presas-Mej.2DanNiel100% (1)
- Descripcion y Contenido DiplomadoDocumento6 páginasDescripcion y Contenido DiplomadoDanNielAún no hay calificaciones
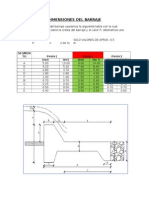
- Dimensiones Del BarrajeDocumento8 páginasDimensiones Del BarrajeDanNielAún no hay calificaciones
- Cotizacion AlojamientoDocumento3 páginasCotizacion AlojamientoYorman PrietoAún no hay calificaciones
- 1.4 Ficha de PersonalDocumento10 páginas1.4 Ficha de PersonalMarco Yika A.Aún no hay calificaciones
- Analisis Semiotico El Viaje de ChihiroDocumento29 páginasAnalisis Semiotico El Viaje de ChihiroFernanda GilAún no hay calificaciones
- Especificaciones Tecnicas ResumidasDocumento3 páginasEspecificaciones Tecnicas ResumidasPaulina BeovidesAún no hay calificaciones
- PADRON DE ENTREGA Sexto GradoDocumento2 páginasPADRON DE ENTREGA Sexto GradoVanessa yngrid Alburqueque palaciosAún no hay calificaciones
- Práctica FinalDocumento7 páginasPráctica FinalLuz AngelaAún no hay calificaciones
- Investigacion #3Documento5 páginasInvestigacion #3Guadalupe Yuco YubanureAún no hay calificaciones
- Jurisdiccion VoluntariaDocumento4 páginasJurisdiccion VoluntarializethAún no hay calificaciones
- Copia de CUESTIONARIO SGS (3099)Documento85 páginasCopia de CUESTIONARIO SGS (3099)Smith AlvarezAún no hay calificaciones
- Beaver Trailers Mexico Vacante 243Documento3 páginasBeaver Trailers Mexico Vacante 243CARLOS HUMBERTO DIMAS GARCIAAún no hay calificaciones
- Armado Completo 6-9-2021Documento32 páginasArmado Completo 6-9-2021Florencia PersiaAún no hay calificaciones
- Reforzamiento 1 Bloque Economia deDocumento2 páginasReforzamiento 1 Bloque Economia deAndrea ReyesAún no hay calificaciones
- Entrevista Silvia C. DubovoyDocumento6 páginasEntrevista Silvia C. DubovoySally Morales de SayanAún no hay calificaciones
- Las Coaliciones de Negociacion. Prof CarolinaDocumento3 páginasLas Coaliciones de Negociacion. Prof CarolinaDaymara Villalba50% (2)
- Transporte Vehicular en ArequipaDocumento23 páginasTransporte Vehicular en ArequipaAngel Villagra AmbroncioAún no hay calificaciones
- Especies Amenazadas de Anfibios de La Región HuánucoDocumento4 páginasEspecies Amenazadas de Anfibios de La Región HuánucoDiegoAún no hay calificaciones
- Cartilla SpotDocumento4 páginasCartilla SpotGleny del Carmen Cortes ManquezAún no hay calificaciones
- Felipe y El EtiopeDocumento29 páginasFelipe y El EtiopeElvis Martinez HerreraAún no hay calificaciones
- Delitos AmbientalesDocumento39 páginasDelitos AmbientalesDICKAún no hay calificaciones
- Ordenanza #140Documento13 páginasOrdenanza #140RA ChrisAún no hay calificaciones
- Tarea #7 Investigación Normas ISO 50,000, IsO20,000 & Huella de CarbonoDocumento14 páginasTarea #7 Investigación Normas ISO 50,000, IsO20,000 & Huella de CarbonoAnaMAún no hay calificaciones
- Apogeo y Caída Del Imperio IncaicoDocumento5 páginasApogeo y Caída Del Imperio IncaicoLaura Perez LandaAún no hay calificaciones
- Los Mormones, PresentacionDocumento9 páginasLos Mormones, PresentacionWilberth Jaquez100% (1)
- Gobierno de Alberto Fujimori para Sexto Grado de PrimariaDocumento2 páginasGobierno de Alberto Fujimori para Sexto Grado de PrimariaEstefany Quispe Ramirez100% (1)
- Ejercicios PibDocumento3 páginasEjercicios PibPilo AlemanAún no hay calificaciones
- Manual Freenas Miguel Ángel Ginés VázquezDocumento38 páginasManual Freenas Miguel Ángel Ginés VázquezGA16DETAún no hay calificaciones
- 28 Jose Es VendidoDocumento4 páginas28 Jose Es VendidoNexi Padilla DE RamirezAún no hay calificaciones
- Baron IceDocumento96 páginasBaron IceMaria Jesús Sullon DurandAún no hay calificaciones
- Clases de MetodosDocumento6 páginasClases de Metodosdnlhrz5804Aún no hay calificaciones