Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Capitulo USB PDF
Capitulo USB PDF
Cargado por
Juan SanchezTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Capitulo USB PDF
Capitulo USB PDF
Cargado por
Juan SanchezCopyright:
Formatos disponibles
Diseño
Integrado
9 Desarrollo del Software
9.1 Proceso de Desarrollo.
El proceso de desarrollo de una aplicación basada en microcontroladores se
compone de las siguientes etapas principales, las cuales se explican en más detalle
en las siguientes sub-secciones.
• Desarrollo de software: Esta etapa corresponde a la escritura y
compilación/ensamblaje del programa que regirá las acciones del microcontrolador y
los sistemas periféricos conectados a este.
• Programación del microcontrolador: En esta etapa el código de máquina
correspondiente al programa desarrollado en la etapa anterior se descarga en la
memoria del microcontrolador.
• Prueba y verificación: Por último, el microcontrolador debe conectarse al
circuito base y someterse a pruebas para verificar el funcionamiento correcto del
programa.
9.1.1 Desarrollo del software.
En esta etapa consiste en escribir y compilar/ensamblar el programa que
determinará las acciones del microcontrolador y su funcionamiento. Existen distintas
maneras de desarrollar el programa, dependiendo del lenguaje inicial que se utiliza
para escribir el programa:
• Lenguaje Ensamblador - Lenguaje de Máquina/Código Objeto
(.asm) → ensamblador → (.hex, .o, .bin, .coff)
• Lenguaje de Alto Nivel - Lenguaje Assembly - Lenguaje de Máquina/Código
Objeto
(.c, .cpp) → compilador → (.asm) → ensamblador → (.hex, .o, .bin, .coff)
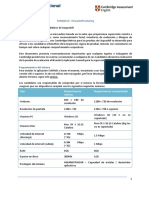
En la Fig. 85 se muestran las dos alternativas típicas que tiene el desarrollador
para generar el código de máquina que es entendido por el microcontrolador.
Universidad de Sevilla Pág. 111
CAPITULO 9
Diseño Desarrollo Software
Integrado
Fig. 85 Alternativas para generar el código máquina
El método básico es escribir el programa en lenguaje de Ensamblador en un
archivo de texto con extensión .asm y luego utilizar un programa ensamblador para
generar un archivo en lenguaje de máquina, también denominado código de máquina
o código objeto (object code), compuesto por instrucciones en código binario que son
directamente entendidas por la CPU del microcontrolador. El ensamblador
normalmente genera un archivo con extensión .hex (por hexadecimal), .o (por objeto),
.bin (por binario), ó .coff (common object file format) dependiendo del ensamblador. El
lenguaje Ensamblador se compone de instrucciones mnemónicas de bajo nivel, es
decir que están ligadas a las carácter místicas del microcontrolador y con un numero
mínimo o nulo de abstracciones. Al carecer de abstracciones, el lenguaje Ensamblador
es más difícil de emplear, requiere experiencia y un mayor tiempo de desarrollo. La
ventaja es que el código de máquina generado a partir de un programa escrito en
lenguaje de máquina es por lo general más eficiente, ya que el programa se desarrolla
en un nivel cercano a las características del hardware.
Otra alternativa es emplear un lenguaje de alto nivel con una mayor cantidad
de abstracciones, la cuales son más fáciles de usar y reducen los tiempos de
desarrollo. Tal vez los lenguajes de alto nivel más comunes para la programación de
controladores es el C y C++, pero también existen otros lenguajes variantes del BASIC
y el Pascal. Una vez escrito el programa en el lenguaje de alto nivel, será necesario
emplear un compilador para traducirlo, ya sea a lenguaje de Ensamblador o
directamente a lenguaje de máquina. Es importante considerar que el código de
Ensamblador generado por los compiladores tiende a ser más largo e ineficiente que
aquel directamente desarrollado en lenguaje de Ensamblador. Esta desventaja puede
ser critica en ciertas aplicaciones que requieren un programas compactos y de una
alta velocidad de ejecución. Un vez que el compilador ha generado el código de
Ensamblador (.asm), será necesario utilizar un ensamblador para generar el código
binario de máquina.
Pág. 112 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
9.1.2 Programación del microcontrolador.
Este proceso corresponde a utilizar un programa en el PC que toma el código
ensamblado (.hex, .o, .bin, .coff) para el microcontrolador específico, y lo envía
mediante algún puerto (serial, paralelo, USB, etc.) a un dispositivo que lo escribe en la
memoria del microcontrolador. Se acostumbra denominar programador tanto al
software como al hardware involucrados para este propósito, lo cual puede prestarse a
confusión. El software programador a veces recibe también el nombre de downloader,
ya que su propósito es descargar o transferir desde el PC al microcontrolador el código
ensamblado.
En la Fig. 86 se muestran las componentes involucradas en el proceso de
programación del microcontrolador. Es importante mencionar que no deben
confundirse los términos desarrollo o programación del software y programación del
microcontrolador, el primero se refiere a escribir el programa, mientras que el segundo
se refiere transferir el código de máquina a la memoria del microcontrolador.
Fig. 86 Programación del microcontrolador.
9.1.3 Prueba y verificación.
Una vez programado el microcontrolador, se puede instalar en el circuito final
para comprobar su adecuado funcionamiento. Existen herramientas de software que
permiten simular el comportamiento de un microcontrolador, muy útiles cuando el
programa alcanza cierta complejidad para resolver problemas en un circuito real.
Universidad de Sevilla Pág. 113
CAPITULO 9
Diseño Desarrollo Software
Integrado
9.2 Ciclo de diseño
En la Fig. 87 vemos el ciclo de diseño con el que vamos a trabajar, desde el
diseño hasta el análisis del código depurado, siendo todo este proceso un ciclo que
repetiremos hasta conseguir el resultado final.
CICLO DE DISEÑO:
Fig. 87 Ciclo de diseño
La primera fase es la edición del programa fuente, utilizando para ello el
editor MPLAB. Si pretendemos desarrollar el código de la aplicación en lenguaje de
alto nivel, debeos utilizar un compilador como PCW de CCS.
Independientemente de que lenguaje utilizaremos para la construcción del
programa fuente, será necesario convertir dicho programa en lenguaje máquina que
es el empleado por los microcontroladores PIC, utilizando el ensamblador MPASM que
vienen incluido en el entorno de desarrollo integrado MPLAB IDE
Durante la fase de construcción, detectaremos los errores de sintaxis que se
hayan podido cometer en la edición del programa fuente, ya que automáticamente, el
ensamblador o el compilador que estemos usando nos remarcará todas aquellas
líneas que no sea capaz de traducir a código máquina. Una vez solucionados los
problemas obtendremos el código máquina o hexadecimal, es decir, un archivo con
extensión .HEX. El resto de los archivos suelen ser archivos auxiliares con información
necesaria para la traducción, empleados por la herramienta de depuración, emulación
o simulación.
Concluida la fase de construcción del proyecto llega la fase de construcción
del proyecto, comprobando que el código generado tiene el funcionamiento deseado,
entrando en la fase de depuración del programa.
Pág. 114 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
Una vez tengamos el programa completamente construido y depurado,
entramos en la fase final, de volcado sobre la memoria del PIC, terminando entonces
la fase última de programación.
9.3 Manejo de las Aplicaciones.
9.3.1 Características de memoria e instrucciones para comenzar a
programar
Con los ejemplos de las lecciones que Microchip proporciona de forma gratuita
en su página web, podemos comenzar a entender el funcionamiento del dispositivo.
Como ya se ha comentado en la introducción de la memoria, los
microprocesadores poseen una distribución de la memoria que separa las aplicaciones
de datos de las funciones de instrucción. Vemos estos aspectos de forma detallada:
ORGANIZACIÓN DE LA MEMORIA:
Los microprocesadores se diseñan de forma que encontramos separada la
memoria de datos de la memoria de programas, lo que permite una rápida
ejecución ya que tendremos buses de datos y direcciones separados.
La Memoria de Datos esta formada con ‘file registers’. Las instrucciones que
necesitan acceder a estos datos utilizan 12 bits, por lo que sólo pueden direccional
4096 posiciones. Estos ‘file registers’ son agrupados en páginas de forma que
podemos acceder a distintas páginas con dos bits más significativos del Registro
BSR<3:0>. Para cargar un valor literal en el registro BSR se utiliza la instrucción
MOVLB.
En la memoria de datos existen posiciones que actúan como Funciones
Especiales de Registro (SFRs), las cuales hacen posible la comunicación del
programa con los periféricos, actuando como registros de control de la CPU.
Comienzan desde la posición superior del Banco 15 y extendiéndose hacia las
direcciones inferiores. Además, en la memoria de datos existen posiciones que
están reservadas para el Registro de Propósito General (GPRs), donde se pueden
almacenar las variables del programa. Los GPR comienzan desde la dirección
inferior (0x000) del Banco 0 y se expansionan hacia direcciones superiores.
Para la programación y el uso del USB con el PIC18F2550 hemos de tener en
cuenta que los bancos de datos 4 y hasta el 7 serán los que asignemos como
buffer para la comunicación con el USB. Este área será compartida entre el
microcontrolador y el Motor de Interfaz USB Sucesivo (SIE) y será usada para
transferir datos directamente entre los dos.
Universidad de Sevilla Pág. 115
CAPITULO 9
Diseño Desarrollo Software
Integrado
La Memoria de Programa es de tipo Flash y contempla un espacio de 2MB
direccionable por byte a partir del Contador de Programa (PC) de 21 bites. Cada
instrucción tiene una longitud de 16 bit y en consecuencia su dirección siempre
debe de ser par.
La memoria Flash puede ser escrita, leída y borrada durante el
funcionamiento del dispositivo, siempre que sea correcta a VDD.
Fig. 88 Memoria de Programa
Fig. 89 Memoria de Datos.
Pág. 116 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
FORMATO DE LAS INSTRUCCIONES
Todas las instrucciones se pueden ajustar a uno de los tres formatos que
especificamos a continuación:
1. Byte Instructions: Constituida por 7 bits para direcciones de datos, 1 bit
de destino y 6 bit de código. Los 7 bit de la dirección del dato, junto con
los bits RP0 y RP1 del Registro de Estado forman un direccionamiento
de 9 bits para el dato con el que se pretende trabajar. Los otros datos
con los que realizar la operación se van a encontrar en el Registro de
Trabajo (llamado W o W reg). Después de realizar la operación, el bit de
destino especifica donde debemos almacenar el resultado, si en el
registro de trabajo o bien en el registro original del dato.
2. Bit Instruction: Opera sobre un bit especifico dentro del registro. Formada
por 7 bits para la dirección del dato, 3 bit numéricos y los restantes 4 bit
para el código de la instrucción.
3. Literal Instructions: Contienen el valor del dato dentro de la propia
instrucción. Igual que antes el Registro de Trabajo nos indicará el valor
del otro dato necesario en la instrucción.
Existen además 3 formas de declarar una variable:
#define Length 0x00 ; Localizamos la variable en una dirección
Length equ 0x00 ; Damos un valor inicial a la variable
cblock 0x00 ; Comienza un bloque de variables
Length ; Se almacena en la dirección 0x00
Width ; Se guarda en 0x01
Area:2 ; Ocupa dos bytes, 0x02 y 0x03
Girth ; Se queda en la posición 0x04
endc
9.3.2 Primeros pasos en la programación
La tarea aparentemente directa de simplemente conectar un LED a uno de los
pines de salida del PIC para hacer encender una luz nos aporta los siguientes
conocimientos:
• La capacidad de usar un ambiente de desarrollo; para cambiar el
código a lenguaje ensamblador conocido por el PIC
• La capacidad de usar correctamente el programador del PIC para
cargar el código en el chip
• Colocar el PIC en el modo correcto de operación
• La escritura del código que pondrá en el pin de salida el nivel de señal
adecuado, alto o bajo, para hacer encender al LED.
Universidad de Sevilla Pág. 117
CAPITULO 9
Diseño Desarrollo Software
Integrado
Si conseguimos encender el LED, entonces sabremos que tenemos un
entorno de trabajo, programador, ensamblador... que comprende la arquitectura y
las instrucciones del PIC y que serán suficientes para comenzar a trabajar.
En las líneas siguientes podemos ver el código de nuestro primer programa.
;******************************************************************
;
; PROYECTO FIN DE CARRERA
; PLACA DETECTOR DE MOVIMIENTO
; ENCENDER LED 1
;
; Realizado: MARTA ARENAS MAS
; Fecha: 22-Mayo-2008
; Versión: v1
;
;******************************************************************
;
; Ficheros Utilizados: P18F2550.INC
; 18F2550.LKR
;
;******************************************************************
LIST P=18F2550, F=INHX32 ; Procesador utilizado
#include <P18F2550.INC> ; Incluir el fichero con símbolos y etiquetas
;******************************************************************
ORG 0x00 ; Inicio en el Vector de Reset
goto INICIO ; Va a la primera instrucción del programa
ORG 0x18 ; Salta los Vectores de Interrupción
;******************************************************************
; Comienza el programa
INICIO
movlb B'00001111' ; Selecciono Registro del Banco 1
bcf TRISB,7 ; Configuro pin RB7 como Salida
bsf PORTB,7 ; Enciende led conectado a RB7 LED 1
goto $ ; espera ahí
end
;******************************************************************
; Fin del programa
END
Antes de programar el PIC con el código anterior es necesario informar al
MPLAB que desactive el “Watchdog” y de esta manera evitar que se produzca un
reset del PIC y también hay que indicarle el tipo de oscilador que estamos utilizando,
en nuestro caso un oscilador HS+PLL.
Para configurar estos bits tenemos que ir al menú de “Configura” y en la
pestaña de “Configure bits” podemos configurarlos.
Pág. 118 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
Este primer programa es mejorable tanto en extensión como en el uso de
instrucciones, pero como ya dijimos anteriormente su función era simplemente para
aprender a programar con el software MPLAB y saber utilizar diferentes instrucciones
en assembler, por eso no creímos necesario mejorarlo ya que no aportaba nada a
nuestro proyecto.
9.4 Conexión PC - USB
USB es un bus punto a punto, con inicio en el HOST y destino en un dispositivo
o en HUB. El protocolo de comunicación se basa en el paso de testigo, donde el
HOST proporciona el testigo al dispositivo seleccionado para la comunicación.
La conexión del USB pasa por la definición de un conjunto de descriptores que
defina el comportamiento del dispositivo que se pretende conectar y la utilización de
un driver que configure el PC la comunicación establecida con ese dispositivo.
Como ya hemos comentado existen varias clases de descriptotes. Los que
vamos a destacar a la hora de definir y configurar un nuevo dispositivo USB son los
descriptotes de dispositivo y de interfaz que contienen tres campos especialmente
relevantes para su clasificación, el campo de Clase, subclase y protocolo. Estos son
los campos usados por el sistema operativo para asociar un dispositivo o una interfaz
a un driver genérico.
Una clase USB, como ya hemos indicado, es una agrupación de dispositivos
de características comunes, es decir, que utilizan una misma forma de comunicarse
con el entorno. La clase de dispositivo permite conocer la forma en que la interfaz se
comunica con el sistema, el cual puede localizar el driver que puede controlar la
conectividad entre interfaz y el sistema. [11]
USB sólo permite al driver comunicarse con el periférico a través de las
tuberías (pipes) establecidas entre el sistema USB y los Endpoints del periférico. Los
tipos de transferencia a través de las pipes dependen de los Enpoints y pueden ser:
Bulk, Control, Interrupt e Isocronous.
Estos enlaces, que definen el ancho de banda, el tipo de transferencia, la
dirección, el flujo de datos y el tamaño del paquete de datos, se implementan en la
inicialización del USB. Un Endpoint es un buffer dentro del dispositivo o el periférico
donde se almacenan paquetes de información. Todos los dispositivos deben admitir al
EP0, el cual recibe el control y las peticiones de estado durante la enumeración del
dispositivo. Cuando se conecta un dispositivo al HOST se produce la enumeración,
asignando la dirección y permitiendo la transferencia de datos.
En el sistema que diseñaremos existirá una librería ****.h en la que se
configura el dispositivo que vamos a emplear, es decir, se inicializan los descriptores
necesarios para la configuración del USB.
Universidad de Sevilla Pág. 119
CAPITULO 9
Diseño Desarrollo Software
Integrado
En la librería de cabecera es necesario indicar:
1. En el descriptor de dispositivo existe un campo (bDeviceClass) que indica
si el dispositivo pertenece a una clase USB definida. En este caso, el
campo presentará un valor entre 01h y FEh dependiendo de la clase a la
que pertenezca. El valor FFh significa que la clase es específica de un
vendedor y está definida por este.
Algunos dispositivos especifican la clase en el descriptor de interface, para
este tipo de dispositivos este campo será 00h y en el campo
bInterfaceClass del descriptor de interfaz se indicará la clase a la que
pertenece. No todos los dispositivos pertenecen a una clase.
2. Si el periférico no pertenece a una clase ya definida o se le quiere asignar
un driver específico (no genérico), los campos de clase, subclase y
protocolo del descriptor de dispositivo o interfaz deben de valer FFh (clase
específica de un vendedor) y en los campos del descriptor de dispositivo
idVendor y idProduct se debe indicar tanto el identificador de vendedor y
como el del producto. Cada fabricante tiene un identificador de vendedor
único que debe incluir en el descriptor de dispositivo de sus productos. El
identificador de producto lo decide el fabricante para identificar a los
dispositivos. Estos dos valores se deben incluir también en un fichero INF
que el sistema operativo utilizará para decidir que driver debe asignar al
periférico en función de estos dos valores.
Cuando el sistema operativo enumera un nuevo dispositivo USB, el
Administrador de Dispositivos compara los datos de todos los ficheros INF con la
información de los descriptores obtenida del dispositivo durante la enumeración. Para
evitar tener que leer todos los INF cada vez que se detecta un nuevo dispositivo,
Windows tiene una base de datos de información sobre drivers con información
obtenida de los ficheros INF. [10]
El periférico que se va a desarrollar no pertenece a ninguna clase genérica, así
que habrá que indicar el driver que se le quiere asignar. El driver que se utilizará será
un driver USB de propósito general para Windows suministrado por Microchip
(mchpusb.sys). Así mismo, Microchip proporciona un identificador de vendedor
(0x04D8) que puede ser utilizado en productos desarrollados con microcontroladores
PIC.
Respecto a los puntos finales, además del EP0 (que siempre se utiliza), se
necesitará otro más para pasar los datos del periférico al Host. La dirección de los
datos será de entrada y el tipo de transferencia que utilizado será tipo bulk, masiva.
Utilizaremos el EP1, que es bidireccional y tiene tres modos de comunicación, bulk,
Interrupción o isócrona.
Pág. 120 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
9.5 Creación del fichero INF.
Cuando el sistema operativo detecta un nuevo periférico USB, intenta
determinar qué driver debe utilizar para comunicarse con el dispositivo y una vez
determinado, cargar el driver seleccionado. Esto lo lleva a cabo el Administrador de
Dispositivos, que utiliza instaladores de clase y dispositivo y archivos INF para
encontrar el driver adecuado para cada dispositivo.
El Administrador de Dispositivos además de ser el responsable de instalar,
configurar y desinstalar dispositivos, también se encarga de añadir información sobre
cada dispositivo en el registro del sistema, el cual contiene información sobre el
hardware y el software instalados en el sistema.
Los instaladores de clase y dispositivo son DLLs. Windows tiene una serie de
instaladores por defecto que el Administrador de Dispositivos utiliza para localizar y
cargar drivers para dispositivos pertenecientes a clases soportadas por el sistema
operativo.
El archivo INF es un fichero de texto que contiene información que ayuda a
Windows a identificar el dispositivo. Este archivo indica al sistema operativo que
drivers debe utilizar y que información debe almacenar en el registro. [10]
La información en un archivo INF está dividida en secciones. Cada sección
puede ser identificada porque su nombre está entre corchetes. Las principales
secciones son:
• Versión: Especifica el sistema operativo para el que está destinado el fichero INF.
Para dispositivos que utilizan WDM (Windows Driver Model) drivers, el valor
puede ser $Windows 98$, $Windows NT$ o $Chicago$, independientemente del
sistema operativo que esté instalado en el ordenador. En esta sección se indica
también el nombre de la clase de los dispositivos instalados con este fichero así
como un identificador de clase que es utilizado por el registro del sistema para
identificar a los dispositivos pertenecientes a esta clase.
• ClassInstall: En esta sección se indica si se ha de instalar una nueva clase. El
Administrador de Dispositivos únicamente procesa la sección si una clase de
dispositivo aún no está instalada en el sistema. Aquí será donde indicaremos el
icono, el nombre y la descripción de la clase así como el nombre del archivo DLL
(tempusbci.dll) que instalará la nueva clase en el Administrador de Dispositivos.
• Manufacturer: Esta sección contiene el identificador de vendedor y de producto,
que en nuestro caso se corresponde con (USB\ VID_04D8 & PID_0011). Cuando
el Administrador de Dispositivo encuentra una coincidencia entre estos valores y
los identificadores obtenidos del dispositivo durante la enumeración, sabe que ha
encontrado el archivo INF correcto.
• DestinationDirs: Indica el directorio o directorios donde se copiarán los ficheros.
• Strings: Define las cadenas referenciadas en las otras secciones.
Universidad de Sevilla Pág. 121
CAPITULO 9
Diseño Desarrollo Software
Integrado
9.6 Creación de una nueva clase.
El último paso ha sido la edición del Driver suministrado por Microchip de tal
forma que apareciera en el Administrador de Dispositivos una nueva clase con un
icono personalizado.
El periférico desarrollado no pertenece a ninguna de las clases USB definidas,
así que lo que debemos crear una nueva clase que aparezca en el Administrador de
Dispositivos con un icono personalizado. Para esto, ha sido necesario crear una DLL
que exporte ese icono. Se necesita para ello el DDK (Driver Development Kit
Windows_Server_2003_sp1_ddk) de Microsoft:. Esta herramienta incluye muchos
ejemplos y se ha utilizado uno de ellos para crear la DLL. El ejemplo utilizado se llama
Toaster y es un ejemplo genérico sencillo con código comentado que puede ser usado
para aprender a escribir drivers, filtros, ficheros INF o cómo instalar una clase o un
paquete. La dirección en la que encontramos este fichero, una vez instalado el DDK
de la página principal de Micrsoft, es la siguiente:
C:\WINDDK\3790.1830\src\general\toaster\classinstaller.
Incluye varios directorios que contienen todos estos ficheros, aunque el único
interesante para nosotros es el directorio classinstaller. Dentro de este directorio
sustituiremos el icono del ejemplo por el que nosotros vayamos a utilizar, en este caso
el icono se llama icon.ico, y el fichero tostrcls.def lo sustituiremos por otro llamado
picusbci.def que contendrá el siguiente código:
LIBRARY PICUSBCI
EXPORTS
PicUSBClassInstaller
El resto de ficheros del directorio no hace falta sustituirlos pero si que es
necesario realizar algunos cambios en ellos (básicamente es cambiar el nombre de la
clase utilizada en el ejemplo por el que utilizaremos nosotros y que es
PicUSBClassInstaller). De esta forma, en el fichero sources habrá que poner la línea
TARGETNAME=picusbci, y en classinst.c habrá que sustituir el nombre, quedando de
la siguiente forma:
DWORD CALLBACK
PicUSBClassInstaller(
IN DI_FUNCTION InstallFunction,
IN HDEVINFO DeviceInfoSet,
IN PSP_DEVINFO_DATA DeviceInfoData OPTIONAL
)
En la plantilla de recursos classinst.rc se tiene que cambiar por una parte el
icono que se utilizará y por otra, en la información de la versión, se incluye información
sobre la descripción de la clase, el nombre del fabricante y el nombre del fichero
resultante encargado de realizar la instalación de la clase en el Administrador de
Dispositivos (archivo DLL).
Pág. 122 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
Cuando se han realizado todos estos cambios se procede a crear el archivo
DLL que necesitamos. Para ello en la línea de comandos del DDK se ejecuta build –cZ
toaster. Con este comando se crearán todos los ficheros .sys, .exe y .dll del proyecto
Toaster, incluyendo el archivo DLL necesario para instalar la clase y que se llama
picusbci.dll. De todos los ficheros creados este será el único que nos servirá y
permitirá que al conectar el periférico al ordenador.
Debemos entonces modificar el archivo .inf suministrado por Micrchip, para que
lea la dll creada por la DDK. El driver en sí lo suministra Microchip y no debemos
modificarlo, aunque podría estudiarse, ya que existen limitaciones de velocidad en el
driver que proporciona y no acepta la velocidad completa de los dispositivos USB, sin
embargo es un estudio complejo que no es necesario en el proyecto.
9.7 Resultado de la comunicación USB - PC
Cuando se conecta el dispositivo al ordenador, Windows muestra el mensaje
Nuevo Hardware Encontrado. Si el periférico nunca ha sido enumerado en el sistema,
el sistema operativo necesita localizar un driver para él. Al ser la primera vez que se
conecta el dispositivo y no ser de una clase genérica, Windows no encontrará un
archivo INF que pueda utilizar para asignarle un driver y lanzará el Asistente para
Agregar Nuevo Hardware donde se puede indicar la localización del archivo INF
necesario para la instalación del periférico.
Una vez localizado, se carga el driver indicado, se añade el periférico en el
Administrador de Dispositivos y se indica al usuario que la instalación del dispositivo
ha finalizado de forma correcta. En el Administrador de Dispositivos se puede ver
también la descripción del dispositivo y el fabricante, obtenidos del archivo INF.
Fig. 90 Nuevo Hardware USB funcionando correctamente.
Universidad de Sevilla Pág. 123
CAPITULO 9
Diseño Desarrollo Software
Integrado
Durante esta operación, se ha copiado el fichero INF (PicUSB.inf) en el
directorio \windows\inf, el driver suministrado por Microchip (mchpusb.sys) en
\windows\system32\drivers y el instalador de clase (picusbci.dll) en
\windows\system32, de forma que la próxima vez que se conecte el dispositivo, el
ordenador lo reconocerá sin necesidad de indicar ningún dato.
9.8 Migración RS232 a USB
La interfaz RS232 está desapareciendo de los ordenadores personales y esto
supone un problema, ya que muchas de las aplicaciones que se realizan con
microcontroladores utilizan este bus para la comunicación con el PC. La solución ideal
es migrar todo el protocolo de comunicación a tecnología USB, sin embargo, esto lleva
consigo el inconveniente de tener que rediseñar todo el software para que soporte un
nuevo tipo de transferencia de datos.
Para hacer la transición de forma cómoda, lo más conveniente es emular un
RS232 con el USB, con la ventaja de que el PC verá la comunicación USB como una
conexión COM RS232 y no requerirá cambios en el software existente.
Otra ventaja es que se utilizan drivers suministrados por Windows, como el
usbser.sys ó el ccport.sys, fácilmente accesibles.
Para realizar la comunicación de esta forma debemos acudir a la definición de
clase de dispositivo USB, campo del descriptor de dispositivo. Microchip estable la
especificación Clase de Dispositivo de Comunicación (CDC) que define algunos
modelos de comunicación, incluyendo la comunicación serie, que se apoya en el driver
usbser.sys de Windows.
Para la especificación CDC USB se necesitan dos intefaces USB, primero la
interfaz Communication Class, utilizando Endpopint de entrada de Interrupción y
después la interfaz Data Class usando un Endpoint de Salida masiva de datos y un
Endppoint de Entrada masiva de datos. Esta interfaz es la utilizada para transferir
datos que normalmente deberían ser transmitidos por RS232.
El archivo necesario para definir la interfaz lo proporciona Microchip de forma
gratuita en su página web y es el llamado mchpcdc.inf, con el el PC será capaz de
reconocer el dispositivo y asociarle le driver necesario para su configuración, control y
manejo.
Tanto este fichero como el fichero de cabecera ****.h donde se definen la
interfaz que debe de adoptar el dispositivo son necesarios para la conexión del USB
CDC al ordenador. El resultado, una vez configurado el dispositivo y obtenido el
archivo. Inf y driver de la configuración, tras pasar el asistente de Hardware de
Windows es el que se muestra a continuación:
Pág. 124 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
Fig. 91 Nuevo Hardware USB CDC funcionando correctamente
9.9 El Compilador y las librerías
El compilador utilizado para crear el programa e el PIC es el PCWH de la
empresa CCS, como ya hemos comentado.
La decisión de utilizar un compilador se realizó debido a las ventajas que
supone programar en lenguaje C, además de incluir ayudas gracias al uso de librerías
con las que se facilita la tarea de programación de la aplicación, incorporando
funciones para el manejo de las aplicaciones como el USB, o el Convertidor A/D. Las
librerías imprescindibles para la generación de la aplicación son:
• 18F2550.h: Fichero de cabecera estándar para dispositivos
PIC18F2550. Librería con las direcciones de los pines del PIC 18F2550 y
la definición de constantes esenciales para programar este controlador.
• pic18_usb.h: Capa hardware de los dispositivos PIC18Fxx5x. Librería
que incluye las funciones y constantes necesarias para la comunicación
USB con los microcontroladores de la familia 18Fxx5x.
• usb.c: Manejador de peticiones USB estándar. Otra librería con más
funciones generales sobre la comunicación USB, maneja las
interrupciones USB y el USB Setup Requests en Endpoint 0.
Universidad de Sevilla Pág. 125
CAPITULO 9
Diseño Desarrollo Software
Integrado
• usb.h: Librería con el prototipo de funciones, definiciones y variables
globales USB, utilizadas en el driver USB.
• Usb_cdc.h: Driver que permite utilizar una clase de dispositivo CDC
USB, emulando un dispositivo RS232 y lo muestra como un Puerto COM
en Windows.
Para que la conversión A/D se realice de forma correcta es necesario añadir en
el fichero 18F2550.h la directiva #device PIC18F2550 ADC=10. Esta directiva indica el
número de bits que debe devolver la fución read_adc(). Es necesario indicarlo ya que,
en caso contrario, sólo nos devolvería los 8 bits más significativos de la conversión
A/D (registro ADRESH). En la conversión A/D se utiliza justificación a izquierdas, por lo
que, de los 10 bits resultantes de la conversión, los 8 más significativos se
almacenarán en el registro ADRESH, mientras que los 2 bits menos significativos se
almacenarán en los bits más significativos del registro ADRSL.
9.10 Funciones Utilizadas en la aplicación del microcontrolador
Indicamos en este apartado algunas de las funciones que se utilizan en el
compilador CCS para manejar los recursos que nos ofrece el PIC
9.10.1 Manejo del Convertidor A/D
Las funciones más importantes de configuración y control del Convertidor A/D
• Setup_port_A(AN0_TO_AN” | VSS_VDD): Los pines 0,1 y2 del Puerto
A se establecen como entradas analógicas, y las tensiones de referencia
son las que entran en el PIC por los pines VDD y VSS.
• Setup_adc(ADC_CLOCK_INTERNAL): Configuración del uso de reloj
del PIC.
• Set_adc_channel(1): Indicarle el canal donde debe recibir la
información.
• Set_tris_A(0b00000111): Configuración de la entrada del Puerto A
• Read_adc(): Pasamos a la lectura del valor convertido, almacenándolo
en una variable que puede ser un entero.
Pág. 126 Universidad de Sevilla
CAPITULO 9
Desarrollo Software Diseño
Integrado
9.10.2 Manejo del USB
Las funciones más importantes para el manejo del USB, son entre otras:
• usb_init(): Inicializa el hardware USB. Espera en un bucle infinito hasta
que el periférico USB es conectado al bus (aunque eso no significa que
haya sido enumerado por le PC). Habilita y utiliza la interrupción USB.
• usb_task(): Si se utiliza una detección de conexión para la inicialización,
entonces se debe llamar periódicamente a esta función para controlar el
pin de detección de la conexión. Cuando el PIC es conectado o
desconectado del bus, esta función inicializa el periféric USB o resetea el
USB snack y el periférico.
• usb_enumerated(): Devuelve un TRUE si el dispositivo ha sido
enumerado por el PC y, en este caso, el dispositivo entra en modo de
operación normal y puede enviar y recibir paquetes de datos.
• usb_wait_for_enumerated(): Se encarga de mirar el estado de la
conexión, asegurando la correcta inicialización del mismo.
• usb_cdc_putc(c): Coloca un carácter en el buffer de transmisión; en el
caso de que este lleno esperará a que pueda enviarlo.
• usb_put_packet(1, envia, 1, USB_DTS_TOOGGLE): Coloca paquetes
de bytes en el buffer para que el PC lo recoja. En este caso, enviamos el
paquete de tamaño 1 byte utilizando la variable envia que es la que
contiene el byte a enviar.
9.11 Aplicación del Microcontrolador.
El programa que se ejecutará en el microcontrolador tiene como objetivo el
envío de datos a través del módulo de comunicación USB. Su funcionalidad será
bastante intuitiva utilizando las funciones descritas anteriormente.
En primer lugar será necesario establecer las palabras de configuración del
dispositivo, sabiendo el modo en el que vamos a desarrollar la aplicación y la clase de
dispositivo que usaremos en la comunicación con el USB. Las opciones adecuadas:
• Oscilador en modo HSPLL con los valores pre y post-escala adecuados para
obtener una frecuencia interna de 48MHz necesaria para la comunicación con USB
de alta velocidad.
• Habilitación del regulador interno del módulo USB
• Deshabilitación del Wachdog Timer que no vamos a utilizar en el proyecto
Universidad de Sevilla Pág. 127
CAPITULO 9
Diseño Desarrollo Software
Integrado
El programa, al conectar el periférico al host y llegarle alimentación, hará que
se encienda un LED. Una vez alimentado se procederá a la inicialización de los
registros USB, tras lo cual comenzará el proceso de enumeración del dispositivo USB
por parte del host. Si este finaliza correctamente se apagará el LED que estaba
encendido y se encenderá un segundo LED, indicando que todo esta listo para
comenzar y esperando en esta situación durante tres segundos, tiempo en el que
deberemos establecer la comunicación con la aplicación desarrollada en el PC para
recibir los datos leídos desde el dispositivo.
Tras la inicialización del USB se configurarán los registros del convertidor A/D y
se comenzará con la lectura consecutiva de las señales analógicas procedentes de las
entradas AN0, AN1 y AN2 y el envío de los resultados obtenidos por el módulo USB.
La conversión y el envío de datos se realiza insertando un retraso de 0.5ms entre cada
conversión y envío, lo que permite controlar que las conversiones y los envíos se
realicen de forma ordenada.
LED ON
Inicialización registros USB
Enumeración
¿Dispositivo
Enumerado?
Sí
LED1 OFF / LED2 ON
Configuración modulo A/D
Conversión A/D
Transmisión de datos
Fig. 92 Diagrama de Flujo del programa del Microcontrolador
Pág. 128 Universidad de Sevilla
También podría gustarte
- Formato Prueba PC PRUBA CORRECTADocumento2 páginasFormato Prueba PC PRUBA CORRECTAAvila OmarAún no hay calificaciones
- Uso de RIP, Ruta Estatica y Ruta DinamicaDocumento6 páginasUso de RIP, Ruta Estatica y Ruta Dinamicaradt01Aún no hay calificaciones
- Preguntas Sistemas OperativosDocumento9 páginasPreguntas Sistemas OperativosJacquelinAún no hay calificaciones
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - SISTEMAS DIGITALES Y ENSAMBLADORES - (GRUPO B01)Documento15 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - SISTEMAS DIGITALES Y ENSAMBLADORES - (GRUPO B01)Alexander ContrerasAún no hay calificaciones
- Como Conectar 2 Routers en La Misma RedDocumento3 páginasComo Conectar 2 Routers en La Misma RedKnch NetAún no hay calificaciones
- 4.5.1.1 Actividad de Clase - ConectadosDocumento2 páginas4.5.1.1 Actividad de Clase - ConectadosAnael Camara GalindoAún no hay calificaciones
- Bloques de ProcesosDocumento3 páginasBloques de ProcesosJuan MooAún no hay calificaciones
- Tema 1kelmerDocumento37 páginasTema 1kelmerdanielgarpeAún no hay calificaciones
- Sumadi-Recommendaciones para Candidatos-1NEWDocumento3 páginasSumadi-Recommendaciones para Candidatos-1NEWNancy ValAún no hay calificaciones
- Yellow and Black Bee Hive Process Concept MapDocumento2 páginasYellow and Black Bee Hive Process Concept MapKarolina ArenasAún no hay calificaciones
- Consideraciones Previas A La Instalacion de Un Sistema OperativoDocumento7 páginasConsideraciones Previas A La Instalacion de Un Sistema OperativoGenesis Briceño100% (1)
- Informe Caso de Estudio Identificación y Solución de ProblemasDocumento4 páginasInforme Caso de Estudio Identificación y Solución de ProblemasCayamiloAún no hay calificaciones
- Lectura Sobre El Explorador de WindowsDocumento4 páginasLectura Sobre El Explorador de WindowsDenisse Mercado PerezAún no hay calificaciones
- 3.6.1.2 Packet Tracer - Skills Integration ChallengeDocumento4 páginas3.6.1.2 Packet Tracer - Skills Integration ChallengeJose Luis Llampa ColqueAún no hay calificaciones
- Sic Segunda ParteDocumento29 páginasSic Segunda ParteJhonatan GutierrezAún no hay calificaciones
- FPC y GeanyDocumento8 páginasFPC y GeanyJuan DiazAún no hay calificaciones
- Capitulo 8Documento8 páginasCapitulo 8omaxvetAún no hay calificaciones
- Computacion Global 3-5Documento1 páginaComputacion Global 3-5Cesar Santos FajardoAún no hay calificaciones
- IV Control de TransaccionesDocumento45 páginasIV Control de TransaccionesOzz GarciaAún no hay calificaciones
- Actualización XO-1 PDFDocumento10 páginasActualización XO-1 PDFvlackdrackAún no hay calificaciones
- Contador Instalacion de EmpresaDocumento14 páginasContador Instalacion de EmpresaRichard López CAún no hay calificaciones
- UADE BD-Clase 01-Introduccion DBMSDocumento47 páginasUADE BD-Clase 01-Introduccion DBMSTomas TripodiAún no hay calificaciones
- BiosDocumento5 páginasBiosSteve SaulAún no hay calificaciones
- Tarea1 LidiaVidalDocumento21 páginasTarea1 LidiaVidalmaruvi vidalAún no hay calificaciones
- Free NasDocumento121 páginasFree NasarturoAún no hay calificaciones
- MongoDB IntroduccionDocumento19 páginasMongoDB IntroduccionLuna CañizaAún no hay calificaciones
- Comando de Redes de WindowsDocumento43 páginasComando de Redes de Windowsjuses612Aún no hay calificaciones
- Recuperar Marcadores en ChromeDocumento4 páginasRecuperar Marcadores en ChromeJenaro AlvarezAún no hay calificaciones
- UntitledDocumento20 páginasUntitledalex BecerraAún no hay calificaciones
- Requisitos Datto SaaS ProtectionDocumento7 páginasRequisitos Datto SaaS Protectionenigma29Aún no hay calificaciones