También podría gustarte
- Evaluación Jefe-EmpleadoDocumento21 páginasEvaluación Jefe-EmpleadoJonathan Dzul MayAún no hay calificaciones
- La Reforma en Otros PaisesDocumento13 páginasLa Reforma en Otros Paisescristianmedina7Aún no hay calificaciones
- Guía para La Revisión de Gastos OperaciónDocumento6 páginasGuía para La Revisión de Gastos OperaciónNathanelAún no hay calificaciones
- TDR Rotura de BriquetasDocumento3 páginasTDR Rotura de BriquetasJusto Emanuel Saico SaicoAún no hay calificaciones
- Ficha Inscr 166453 PDFDocumento1 páginaFicha Inscr 166453 PDFJusto Emanuel Saico SaicoAún no hay calificaciones
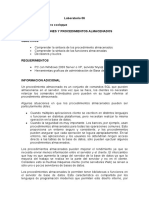
- Lab 6Documento8 páginasLab 6Justo Emanuel Saico SaicoAún no hay calificaciones
- 12 The Knuth Morris Pratt Algorithm (OK)Documento18 páginas12 The Knuth Morris Pratt Algorithm (OK)Justo Emanuel Saico SaicoAún no hay calificaciones
- 11 String Matching With Automata Finite (Ok)Documento10 páginas11 String Matching With Automata Finite (Ok)Justo Emanuel Saico SaicoAún no hay calificaciones
- 12 The Knuth Morris Pratt Algorithm (OK)Documento18 páginas12 The Knuth Morris Pratt Algorithm (OK)Justo Emanuel Saico SaicoAún no hay calificaciones
- 09 Algoritmo-De-Fuerza-Bruta-De-Búsqueda-De-Subcadenas (INFORME) (OK)Documento11 páginas09 Algoritmo-De-Fuerza-Bruta-De-Búsqueda-De-Subcadenas (INFORME) (OK)Justo Emanuel Saico SaicoAún no hay calificaciones
- 11 String Matching With Automata Finite (Ok)Documento10 páginas11 String Matching With Automata Finite (Ok)Justo Emanuel Saico SaicoAún no hay calificaciones
- 11 String Matching With Automata Finite (Ok)Documento10 páginas11 String Matching With Automata Finite (Ok)Justo Emanuel Saico SaicoAún no hay calificaciones
- 01 Informe Rod Cutting (Ok)Documento18 páginas01 Informe Rod Cutting (Ok)Justo Emanuel Saico SaicoAún no hay calificaciones
- Cap 5 Daa09 (Ordenando) para ElsaDocumento40 páginasCap 5 Daa09 (Ordenando) para ElsaJusto Emanuel Saico SaicoAún no hay calificaciones
- Caso PDFDocumento2 páginasCaso PDFLorena Ortiz0% (2)
- Certificado EstudioDocumento3 páginasCertificado EstudioAdalberto Guzmán MoraAún no hay calificaciones
- Clase 8 RIESGOS CORP 2022 IDocumento28 páginasClase 8 RIESGOS CORP 2022 Iperlefaro1234Aún no hay calificaciones
- Reducción de TamañoDocumento16 páginasReducción de Tamañocarolina sadaAún no hay calificaciones
- Presentación de Trabajo Colaborativo TCC Universidad de Cartagena - Metodología de La Eduación A DistanciaDocumento31 páginasPresentación de Trabajo Colaborativo TCC Universidad de Cartagena - Metodología de La Eduación A DistanciaManuel Del ReyAún no hay calificaciones
- Carpeta Pedagógica 2024Documento51 páginasCarpeta Pedagógica 2024hildacuenta35Aún no hay calificaciones
- I Obligatorio Gonzalez CouretDocumento45 páginasI Obligatorio Gonzalez Couretvalecad88Aún no hay calificaciones
- Tenologia FarmaceuticaDocumento4 páginasTenologia FarmaceuticaHéctor BalmoriAún no hay calificaciones
- Dia 5 - Nos Movemos Al Ritmo de La MúsicaDocumento3 páginasDia 5 - Nos Movemos Al Ritmo de La MúsicaMaria Muñoz LinaresAún no hay calificaciones
- Problemas Con Orientación ClínicaDocumento4 páginasProblemas Con Orientación ClínicaJoel PeñalozaAún no hay calificaciones
- Biografía de Charles PeirceDocumento4 páginasBiografía de Charles PeirceJosephine EýmaxAún no hay calificaciones
- Tipos de Tasa de InteresDocumento6 páginasTipos de Tasa de InteresJob VazAún no hay calificaciones
- 2 - Hemodinamia - Ecografía Doppler.Documento11 páginas2 - Hemodinamia - Ecografía Doppler.Yael Melisa Pereyra100% (1)
- QuemadoresDocumento16 páginasQuemadoresbrankoAún no hay calificaciones
- SQL DDDDDFDFDocumento7 páginasSQL DDDDDFDFCarlosOf̲̲̅̅i̲̲̅̅c̲̲̅̅i̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅F̲̲̅̅b̲̲̅̅Aún no hay calificaciones
- La Iglesia Como Comunidad TerapeutaDocumento4 páginasLa Iglesia Como Comunidad TerapeutaWILBERT CIAUAún no hay calificaciones
- Carta de Aceptacion MC 340Documento18 páginasCarta de Aceptacion MC 340elkinfarypossuAún no hay calificaciones
- NotCo - Examen Gestión OficialDocumento42 páginasNotCo - Examen Gestión OficialMATÍAS RAMÓN INFANTE MIDDLETONAún no hay calificaciones
- Demonios en Las ReligionesDocumento14 páginasDemonios en Las Religionesjuan4duque-274579Aún no hay calificaciones
- Plan de Seguridad - Rev A PQT 07Documento112 páginasPlan de Seguridad - Rev A PQT 07JeffDré AbenzAún no hay calificaciones
- Ejemplo H4 Práctico Proyecto Integrador FinalDocumento8 páginasEjemplo H4 Práctico Proyecto Integrador FinalMelina RochaAún no hay calificaciones
- Innaq Plmar PP DWG 001Documento1 páginaInnaq Plmar PP DWG 001Carla FloresAún no hay calificaciones
- Guiía de Autoaprendizaje 4° MedioDocumento16 páginasGuiía de Autoaprendizaje 4° MedioJonathan Almonacid IglesiasAún no hay calificaciones
- Lección 12 - Lección Tesoros de La Verdad (2) - 2 Trim 2023Documento20 páginasLección 12 - Lección Tesoros de La Verdad (2) - 2 Trim 2023Freddy RodriguezAún no hay calificaciones
- Consumo de Drogas Y Terapia OcupacionalDocumento17 páginasConsumo de Drogas Y Terapia OcupacionalGiovanna RodriguezAún no hay calificaciones
- Mundo ContemporaneoDocumento5 páginasMundo ContemporaneoMelani LandazuriAún no hay calificaciones
- Propiedades y Tecnología de La Madera - Parte 1Documento29 páginasPropiedades y Tecnología de La Madera - Parte 1Castle Avalos Lowis ManuelAún no hay calificaciones