También podría gustarte
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Mitchella Partridge Berry Materia Medica HerbsDocumento3 páginasMitchella Partridge Berry Materia Medica HerbsAlejandra GuerreroAún no hay calificaciones
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Revised fire drill performance standardsDocumento47 páginasRevised fire drill performance standardsKartikeya GuptaAún no hay calificaciones
- Cumulative List of Notices to MarinersDocumento2 páginasCumulative List of Notices to MarinersResian Garalde Bisco100% (2)
- Symbols For Signalling Circuit DiagramsDocumento27 páginasSymbols For Signalling Circuit DiagramsrobievAún no hay calificaciones
- YOKOGAWADocumento16 páginasYOKOGAWADavide ContiAún no hay calificaciones
- Cosmic Freedom: David MolineauxDocumento2 páginasCosmic Freedom: David Molineauxsalomon46Aún no hay calificaciones
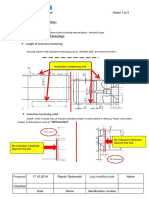
- Induction Hardening - Interpretation of Drawing & Testing PDFDocumento4 páginasInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHAún no hay calificaciones
- BS en 12201 5 2011Documento20 páginasBS en 12201 5 2011fatjon31100% (4)
- NitrocelluloseDocumento7 páginasNitrocellulosejumpupdnbdjAún no hay calificaciones
- 4608 Eed 01Documento29 páginas4608 Eed 01NickAún no hay calificaciones
- High Risk Medications in AyurvedaDocumento3 páginasHigh Risk Medications in AyurvedaRaviraj Pishe100% (1)
- Nakshatra Exaltation DebilitationDocumento3 páginasNakshatra Exaltation DebilitationBhanu Pinnamaneni100% (1)
- Impact of Size Effect On Graphene Nanoribbon Transport-qZlDocumento3 páginasImpact of Size Effect On Graphene Nanoribbon Transport-qZljulio perezAún no hay calificaciones
- Flow Based Image Abstraction ZhYDocumento15 páginasFlow Based Image Abstraction ZhYjulio perezAún no hay calificaciones
- Resistance Controllability of - GKFDocumento3 páginasResistance Controllability of - GKFjulio perezAún no hay calificaciones
- Simulating Low-Cost Cameras For Augmented Reality CompositingDocumento12 páginasSimulating Low-Cost Cameras For Augmented Reality Compositingjulio perezAún no hay calificaciones
- Top-Gated Epitaxial Graphene Fets On Si-Face Sic Wafers With A Peak Transconductance of 600 MS/MMDocumento3 páginasTop-Gated Epitaxial Graphene Fets On Si-Face Sic Wafers With A Peak Transconductance of 600 MS/MMjulio perezAún no hay calificaciones
- Enhancement-Mode GaN MIS-HEMTs With N-GaNi-AlNn-GaN Triple Cap Layer and High-ETxDocumento3 páginasEnhancement-Mode GaN MIS-HEMTs With N-GaNi-AlNn-GaN Triple Cap Layer and High-ETxjulio perezAún no hay calificaciones
- RF Performance of Inaln/Gan Hfets and Moshfets With × Up To 21 GHZ MDocumento3 páginasRF Performance of Inaln/Gan Hfets and Moshfets With × Up To 21 GHZ Mjulio perezAún no hay calificaciones
- Photoelectrochemical Function in Gate-Recessed Algan/Gan Metal-Oxide-Semiconductor High-Electron-Mobility TransistorsDocumento3 páginasPhotoelectrochemical Function in Gate-Recessed Algan/Gan Metal-Oxide-Semiconductor High-Electron-Mobility Transistorsjulio perezAún no hay calificaciones
- High-Temperature Microwave Characteristics of GaAs MESFET Devices With AlAs Buffer Layers-IrCDocumento3 páginasHigh-Temperature Microwave Characteristics of GaAs MESFET Devices With AlAs Buffer Layers-IrCjulio perezAún no hay calificaciones
- Resistance Controllability of Ta O Tio Stack Reram For Low-Voltage and Multilevel OperationDocumento3 páginasResistance Controllability of Ta O Tio Stack Reram For Low-Voltage and Multilevel Operationjulio perezAún no hay calificaciones
- Normally Off GaN MOSFET Based On AlGaNGaN Heterostructure With Extremely High 2DEG Density Grown On - XSCDocumento3 páginasNormally Off GaN MOSFET Based On AlGaNGaN Heterostructure With Extremely High 2DEG Density Grown On - XSCjulio perezAún no hay calificaciones
- Schottky-Drain Technology For Algan/Gan High-Electron Mobility TransistorsDocumento3 páginasSchottky-Drain Technology For Algan/Gan High-Electron Mobility Transistorsjulio perezAún no hay calificaciones
- Algan/Gan Hemt With 300-GhzDocumento3 páginasAlgan/Gan Hemt With 300-Ghzjulio perezAún no hay calificaciones
- Real-Time Rendering Method and Performance Evaluation of Composable 3D Lenses For Interactive VR-6frDocumento13 páginasReal-Time Rendering Method and Performance Evaluation of Composable 3D Lenses For Interactive VR-6frjulio perezAún no hay calificaciones
- Simulating Low-Cost Cameras For Augmented Reality CompositingDocumento12 páginasSimulating Low-Cost Cameras For Augmented Reality Compositingjulio perezAún no hay calificaciones
- Real-Time Detection and Tracking For Augmented Reality On Mobile Phones-MRbDocumento14 páginasReal-Time Detection and Tracking For Augmented Reality On Mobile Phones-MRbjulio perezAún no hay calificaciones
- Status and Future of High-Power Light-Emitting Diodes For Solid-State LightingDocumento16 páginasStatus and Future of High-Power Light-Emitting Diodes For Solid-State Lightingjulio perezAún no hay calificaciones
- Real-Time Ray Tracing of Implicit Surfaces On The GPU-WGpDocumento12 páginasReal-Time Ray Tracing of Implicit Surfaces On The GPU-WGpjulio perezAún no hay calificaciones
- An Overview of 3D Software VisualizationDocumento19 páginasAn Overview of 3D Software Visualizationjulio perezAún no hay calificaciones
- Flow Based Image Abstraction ZhYDocumento15 páginasFlow Based Image Abstraction ZhYjulio perezAún no hay calificaciones
- Opportunistic Tangible User Interfaces For Augmented RealityDocumento13 páginasOpportunistic Tangible User Interfaces For Augmented Realityjulio perezAún no hay calificaciones
- Life of LED Based White Light SourcesDocumento5 páginasLife of LED Based White Light SourcesDulon22Aún no hay calificaciones
- LED-Based Projection Systems: Xing-Jie Yu, Y. L. Ho, L. Tan, Ho-Chi Huang, and Hoi-Sing Kwok, Fellow, IEEEDocumento9 páginasLED-Based Projection Systems: Xing-Jie Yu, Y. L. Ho, L. Tan, Ho-Chi Huang, and Hoi-Sing Kwok, Fellow, IEEEjulio perezAún no hay calificaciones
- Hierarchical Aggregation For Information Visualization Overview Techniques and Design Guidelines-426Documento16 páginasHierarchical Aggregation For Information Visualization Overview Techniques and Design Guidelines-426julio perezAún no hay calificaciones
- A Point-Cloud-Based Multiview Stereo Algorithm For Free-Viewpoint VideoDocumento12 páginasA Point-Cloud-Based Multiview Stereo Algorithm For Free-Viewpoint Videojulio perezAún no hay calificaciones
- Materials Devices and Circuits of Transparent Amorphous-Oxide Semiconductor-RUpDocumento10 páginasMaterials Devices and Circuits of Transparent Amorphous-Oxide Semiconductor-RUpjulio perezAún no hay calificaciones
- A Novel Prototype For An Optical See-Through Head-Mounted Display With Addressable Focus Cues-yREDocumento13 páginasA Novel Prototype For An Optical See-Through Head-Mounted Display With Addressable Focus Cues-yREjulio perezAún no hay calificaciones
- Inkjet-Printed High Mobility Transparent-Oxide SemiconductorsDocumento5 páginasInkjet-Printed High Mobility Transparent-Oxide Semiconductorsjulio perezAún no hay calificaciones
- A Novel Two-Dimensional Adaptive Dimming Technique of X-Y Channel Drivers For LED Backlight System I-C6vDocumento7 páginasA Novel Two-Dimensional Adaptive Dimming Technique of X-Y Channel Drivers For LED Backlight System I-C6vjulio perezAún no hay calificaciones
- An Autosteresoscopic 3D Display System Based On Prism Patterned Projection ScreenDocumento4 páginasAn Autosteresoscopic 3D Display System Based On Prism Patterned Projection Screenjulio perezAún no hay calificaciones
- Fendering For Tugs: Mike Harrison, Trelleborg Marine Systems, UKDocumento5 páginasFendering For Tugs: Mike Harrison, Trelleborg Marine Systems, UKRizal RachmanAún no hay calificaciones
- Cars Ger Eu PCDocumento157 páginasCars Ger Eu PCsergeyAún no hay calificaciones
- Heradesign Brochure 2008Documento72 páginasHeradesign Brochure 2008Surinder SinghAún no hay calificaciones
- Unit 4.2Documento45 páginasUnit 4.2Gundrathi Narendra GoudAún no hay calificaciones
- Pembangkit ListrikDocumento2 páginasPembangkit ListrikDede MulyamanAún no hay calificaciones
- 4thinternationalconferencetheimportanceofplace Proceedings 2017 PDFDocumento428 páginas4thinternationalconferencetheimportanceofplace Proceedings 2017 PDFnerko86Aún no hay calificaciones
- Dimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutDocumento11 páginasDimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutRizqi RamadhanAún no hay calificaciones
- Welcome To International Journal of Engineering Research and Development (IJERD)Documento9 páginasWelcome To International Journal of Engineering Research and Development (IJERD)IJERDAún no hay calificaciones
- Blood Group 3Documento29 páginasBlood Group 3Hamirie JoshuaAún no hay calificaciones
- Product:: Electronic, 2 C #18 STR TC, PE Ins, OS, PVC JKT, CMDocumento2 páginasProduct:: Electronic, 2 C #18 STR TC, PE Ins, OS, PVC JKT, CMAnonymous XYAPaxjbYAún no hay calificaciones
- GMsetDocumento8 páginasGMsetdilo001Aún no hay calificaciones
- Science Section A UPSRDocumento2 páginasScience Section A UPSRvinno8556% (9)
- Navmesh Plus: How ToDocumento7 páginasNavmesh Plus: How TobladimirAún no hay calificaciones
- Desiderata: by Max EhrmannDocumento6 páginasDesiderata: by Max EhrmannTanay AshwathAún no hay calificaciones
- Pentecostal Ecclesiology: Simon K.H. Chan - 978-90-04-39714-9 Via Free AccessDocumento156 páginasPentecostal Ecclesiology: Simon K.H. Chan - 978-90-04-39714-9 Via Free AccessStanley JohnsonAún no hay calificaciones
- 35.2 - ING - El Puente NewsletterDocumento13 páginas35.2 - ING - El Puente NewsletterIrmali FrancoAún no hay calificaciones
- Schroedindiger Eqn and Applications3Documento4 páginasSchroedindiger Eqn and Applications3kanchankonwarAún no hay calificaciones
- Chapter 1Documento33 páginasChapter 1Salihah AbdullahAún no hay calificaciones