También podría gustarte
- NA module-5Documento25 páginasNA module-5ss0097877Aún no hay calificaciones
- Manual EES451Documento33 páginasManual EES451Saikat LayekAún no hay calificaciones
- Lab 6Documento4 páginasLab 6JAGADISH TRIPATHYAún no hay calificaciones
- Transmission LinesDocumento11 páginasTransmission LinesAnirban Z100% (1)
- Surge Propagation in Electrical SystemsDocumento5 páginasSurge Propagation in Electrical SystemssamiAún no hay calificaciones
- 6LABO Ganago Student Lab7Documento27 páginas6LABO Ganago Student Lab7Rocio Deidamia Puppi HerreraAún no hay calificaciones
- J N,-LN: ReferencesDocumento3 páginasJ N,-LN: ReferencesshirtquittersAún no hay calificaciones
- Explore Time & Freq Responses of RLC CircuitsDocumento8 páginasExplore Time & Freq Responses of RLC CircuitsRudra MishraAún no hay calificaciones
- Em Oscill ADocumento12 páginasEm Oscill Aaditya66605Aún no hay calificaciones
- 808PET22 Eliminate Crossover Frequency Guesswork PDFDocumento6 páginas808PET22 Eliminate Crossover Frequency Guesswork PDFRamin DavoodiAún no hay calificaciones
- Ac Circuits Handout and TutorialsDocumento32 páginasAc Circuits Handout and TutorialsyaseenVision100% (1)
- Demystifying Pole Zero DoubletsDocumento11 páginasDemystifying Pole Zero Doubletsr0ssumAún no hay calificaciones
- 3.7 Pulse and Transient Response: William Thomson To The Glasgow Philosophical Society, 19 January 1853Documento1 página3.7 Pulse and Transient Response: William Thomson To The Glasgow Philosophical Society, 19 January 1853babanjashniAún no hay calificaciones
- Parametric Amplifiers and Converters With Pumped Inductance and CapacitanceDocumento5 páginasParametric Amplifiers and Converters With Pumped Inductance and CapacitanceshirtquittersAún no hay calificaciones
- The Chirp z-Transform Algorithm: A Fast Computational Method for Evaluating the z-TransformDocumento7 páginasThe Chirp z-Transform Algorithm: A Fast Computational Method for Evaluating the z-TransformUmesh KrishanthaAún no hay calificaciones
- EE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainDocumento50 páginasEE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainWala SaadehAún no hay calificaciones
- Introduction To Phasors 1: Sinusoidal SignalsDocumento2 páginasIntroduction To Phasors 1: Sinusoidal SignalsshivanshuAún no hay calificaciones
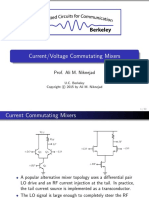
- Lect22 IV MixersDocumento50 páginasLect22 IV Mixersbhasin_hemantAún no hay calificaciones
- 1016 Hanshaw Road Ithaca, Ny 14850 Aug. 1, 2016Documento10 páginas1016 Hanshaw Road Ithaca, Ny 14850 Aug. 1, 2016David MartinsAún no hay calificaciones
- Notes On Fourier Transforms: PHYS 332: Junior Physics Laboratory IIDocumento6 páginasNotes On Fourier Transforms: PHYS 332: Junior Physics Laboratory IIFayazKhanPathanAún no hay calificaciones
- ELECTROMAGNETIC INDUCTION BASICSDocumento4 páginasELECTROMAGNETIC INDUCTION BASICSMahesh AbnaveAún no hay calificaciones
- PLL Circuits Explained: Phase Locked Loop FundamentalsDocumento46 páginasPLL Circuits Explained: Phase Locked Loop Fundamentalsnucleur_13Aún no hay calificaciones
- 1 s2.0 S0007850607613869 MainDocumento4 páginas1 s2.0 S0007850607613869 MainThi Phuong Thanh LeAún no hay calificaciones
- Pulses in Cables: ReferencesDocumento5 páginasPulses in Cables: ReferencesPaul DumitruAún no hay calificaciones
- Stilson-Smith - Alias-Free Digital Synthesis of Classic Analog Waveforms (BLIT)Documento12 páginasStilson-Smith - Alias-Free Digital Synthesis of Classic Analog Waveforms (BLIT)HangTheBankersAún no hay calificaciones
- Experiment # 1: Time and Frequency Responses of Series RLC CircuitsDocumento6 páginasExperiment # 1: Time and Frequency Responses of Series RLC CircuitsJhonn HuamFloAún no hay calificaciones
- Alias-Free Digital Synthesis of Classic Analog WaveformsDocumento12 páginasAlias-Free Digital Synthesis of Classic Analog WaveformsPatrice TarabbiaAún no hay calificaciones
- Lab 4Documento15 páginasLab 4Edwin JijoAún no hay calificaciones
- 4LABO Ganago Student Lab5Documento19 páginas4LABO Ganago Student Lab5Rocio Deidamia Puppi HerreraAún no hay calificaciones
- Cse-I-Basic Electricals Engg. L3 PDFDocumento52 páginasCse-I-Basic Electricals Engg. L3 PDFDeeksha NaiduAún no hay calificaciones
- CH3 LecDocumento12 páginasCH3 LecAbdla DoskiAún no hay calificaciones
- Johnson Noise and Shot Noise: Electronic Address: Dvp@mit - EduDocumento4 páginasJohnson Noise and Shot Noise: Electronic Address: Dvp@mit - EduMark Paul Santin GanzalinoAún no hay calificaciones
- Circuits in The Frequency DomainDocumento4 páginasCircuits in The Frequency DomainBam BrarAún no hay calificaciones
- Factor Affecting Characteristic of Voltage Sag Due To Fault in The Power SystemDocumento12 páginasFactor Affecting Characteristic of Voltage Sag Due To Fault in The Power SystemmukeshhAún no hay calificaciones
- The Phasor Transform and Impedance: 1. ObjectiveDocumento4 páginasThe Phasor Transform and Impedance: 1. ObjectivejbusowiczAún no hay calificaciones
- Appendix E STC CircuitsDocumento18 páginasAppendix E STC Circuitsha9981Aún no hay calificaciones
- HW10Documento18 páginasHW10Vinay Aanand AanandAún no hay calificaciones
- High-Field Laser Physics: ETH Zürich Spring Semester 2010 H. R. ReissDocumento34 páginasHigh-Field Laser Physics: ETH Zürich Spring Semester 2010 H. R. ReissjasmonAún no hay calificaciones
- Part A (10X2 20 Marks) : Dept, of Ece, Ceg Campus, Annauniversity End Semester Examinations Apr-May 2011Documento4 páginasPart A (10X2 20 Marks) : Dept, of Ece, Ceg Campus, Annauniversity End Semester Examinations Apr-May 2011Seenivasan MaAún no hay calificaciones
- Sagnac Effect in Fiber GyroscopesDocumento3 páginasSagnac Effect in Fiber GyroscopesRamiro Zakate ContrerasAún no hay calificaciones
- Coaxial Cable Resistance MeasurementDocumento3 páginasCoaxial Cable Resistance Measurementassadullaashraf627Aún no hay calificaciones
- Abstract: Dispersive Linear Systems With Negative Group Delay Have Caused Much Confusion in TheDocumento11 páginasAbstract: Dispersive Linear Systems With Negative Group Delay Have Caused Much Confusion in TheMarkoCimbaljevicAún no hay calificaciones
- Invited Lecture Ametani 2010Documento18 páginasInvited Lecture Ametani 2010Ramzan QureshiAún no hay calificaciones
- 01 Electrical Parameter Periodic WaveDocumento15 páginas01 Electrical Parameter Periodic WaveYash MotianiAún no hay calificaciones
- General Approach For Accurate ResonanceDocumento3 páginasGeneral Approach For Accurate ResonanceM4gne7icAún no hay calificaciones
- Transient Response of RC CircuitDocumento5 páginasTransient Response of RC CircuitJayesh Ruikar100% (1)
- Ain Shams University RLC Resonance Lab ReportDocumento6 páginasAin Shams University RLC Resonance Lab ReportHossam M.A.Aún no hay calificaciones
- EEE 212 - Applied Electricity 2Documento78 páginasEEE 212 - Applied Electricity 2noumsi briceAún no hay calificaciones
- SLT-A QuestionsDocumento5 páginasSLT-A QuestionsrhythmAún no hay calificaciones
- Lampiran Laprak Bandul MatematisDocumento24 páginasLampiran Laprak Bandul MatematisVadia Tania AlfarenzaAún no hay calificaciones
- Electrical Network Impedance Analysis LabDocumento9 páginasElectrical Network Impedance Analysis LabAbdul Moiz HaiderAún no hay calificaciones
- Circuits textbooks haven't covered feedback amplifier and transistor port impedancesDocumento9 páginasCircuits textbooks haven't covered feedback amplifier and transistor port impedancesBiswajit SinghAún no hay calificaciones
- ManualDocumento11 páginasManualLoveAún no hay calificaciones
- The Torsion Pendulum (One or Two Weights)Documento10 páginasThe Torsion Pendulum (One or Two Weights)DIPESHAún no hay calificaciones
- Columns: Advance of Computation Since These Codes FallDocumento2 páginasColumns: Advance of Computation Since These Codes FallAbhimanyu RavindranathAún no hay calificaciones
- Experiment 14 Electromagnetic Induction: ApparatusDocumento8 páginasExperiment 14 Electromagnetic Induction: Apparatussambhav jainAún no hay calificaciones
- Modern Electrical Installation for Craft StudentsDe EverandModern Electrical Installation for Craft StudentsCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDe EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsAún no hay calificaciones
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)De EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Aún no hay calificaciones
- Measure TheoryDocumento56 páginasMeasure Theorykeynote76Aún no hay calificaciones
- Mathematical Theory of Electromagnetism: Piero BassaniniDocumento384 páginasMathematical Theory of Electromagnetism: Piero BassaniniAma PredaAún no hay calificaciones
- Least Squares in Calibration: Dealing With Uncertainty in X: The Analyst August 2010Documento31 páginasLeast Squares in Calibration: Dealing With Uncertainty in X: The Analyst August 2010keynote76Aún no hay calificaciones
- MAST Language Reference Manual: Release 2003.06, June 2003Documento172 páginasMAST Language Reference Manual: Release 2003.06, June 2003keynote76Aún no hay calificaciones
- MetastabilityDocumento12 páginasMetastabilitykeynote76Aún no hay calificaciones
- 1996 CUG Presentation Nonblocking AssignsDocumento26 páginas1996 CUG Presentation Nonblocking AssignsArief Noor RahmanAún no hay calificaciones
- Afg320user PDFDocumento292 páginasAfg320user PDFTesda SfistAún no hay calificaciones
- Logic Symbols and Truth TablesDocumento11 páginasLogic Symbols and Truth Tableskeynote76Aún no hay calificaciones
- Verilog TutorialDocumento31 páginasVerilog TutorialJagadeesh KumarAún no hay calificaciones
- LXImate Book 3rdDocumento122 páginasLXImate Book 3rdkeynote76Aún no hay calificaciones
- 1554 14390 1 PBDocumento14 páginas1554 14390 1 PBkeynote76Aún no hay calificaciones
- Analog Design BooksDocumento2 páginasAnalog Design Bookskeynote76Aún no hay calificaciones
- Understanding Common & Differential Mode G019Documento7 páginasUnderstanding Common & Differential Mode G019Praveen CkAún no hay calificaciones
- Infinite-Dimensional Vector SpacesDocumento9 páginasInfinite-Dimensional Vector Spacesnislam57100% (1)
- Penrose SolutionsDocumento53 páginasPenrose SolutionsMaria Luisa Ponce MoraAún no hay calificaciones
- STM32F10xxx TIM Application ExamplesDocumento24 páginasSTM32F10xxx TIM Application Examplesenugraha010% (1)
- Theory of Resonance in RLC Circuits635441861152943487Documento7 páginasTheory of Resonance in RLC Circuits635441861152943487Nancy GoyalAún no hay calificaciones
- Tek Probe CircuitsDocumento119 páginasTek Probe CircuitsClifton DouglasAún no hay calificaciones
- ECE 145B / 218B, Notes Set 3: Electrical Device Noise ModelsDocumento19 páginasECE 145B / 218B, Notes Set 3: Electrical Device Noise Modelskeynote76Aún no hay calificaciones
- Research Article: Complete Triaxis Magnetometer Calibration in The Magnetic DomainDocumento11 páginasResearch Article: Complete Triaxis Magnetometer Calibration in The Magnetic Domainkeynote76Aún no hay calificaciones
- Sequential and Parallel Block ConstructsDocumento43 páginasSequential and Parallel Block ConstructsZeeshan MazharAún no hay calificaciones
- How To Install Apk FilesDocumento7 páginasHow To Install Apk FilesJohn Adams VillamoranAún no hay calificaciones
- Riesz Sequence Lebesgue Integral 120106Documento71 páginasRiesz Sequence Lebesgue Integral 120106keynote76Aún no hay calificaciones
- Toti Screen June11 2013 PDFDocumento421 páginasToti Screen June11 2013 PDFkeynote76Aún no hay calificaciones
- EPR Paradox and Bell's TheoremDocumento79 páginasEPR Paradox and Bell's Theoremkeynote76Aún no hay calificaciones
- T Rec G.993.2 201501 I!!pdf eDocumento430 páginasT Rec G.993.2 201501 I!!pdf eYadier OliveraAún no hay calificaciones
- Schroedinger-Poisson SolversDocumento27 páginasSchroedinger-Poisson Solverskeynote76Aún no hay calificaciones
- FittingAlgorithms and SeedSweeps PDFDocumento14 páginasFittingAlgorithms and SeedSweeps PDFkeynote76Aún no hay calificaciones
- Pierce Gate IntroductionDocumento3 páginasPierce Gate IntroductionDefaultAnomolyAún no hay calificaciones
- Celestial Mix Processor SchematicDocumento2 páginasCelestial Mix Processor SchematicBlogul TendinteAún no hay calificaciones
- PS 626i Mixer Gemini ManualDocumento6 páginasPS 626i Mixer Gemini ManualCristian RubianoAún no hay calificaciones
- Electronics Science Question PaperDocumento63 páginasElectronics Science Question PaperShubham KAún no hay calificaciones
- 01-24 Optical Amplifying BoardDocumento59 páginas01-24 Optical Amplifying BoardGhallab AlsadehAún no hay calificaciones
- Service Manual 43BDocumento174 páginasService Manual 43Bbogdy00733054Aún no hay calificaciones
- Control Lab Report Experiment No. 02Documento10 páginasControl Lab Report Experiment No. 02Nahin AminAún no hay calificaciones
- Opamp RazaviDocumento33 páginasOpamp Razavivikramkolanu100% (1)
- Low-Noise Dual Operational Amplifier: General Description Package OutlineDocumento5 páginasLow-Noise Dual Operational Amplifier: General Description Package OutlineĐiện Tử Hùng NgọcAún no hay calificaciones
- Gaudet V C Smith K C Laboratory Explorations To Accompany Mi PDFDocumento108 páginasGaudet V C Smith K C Laboratory Explorations To Accompany Mi PDFMiguel Angel Clavijo QuispeAún no hay calificaciones
- Linsley Hood Class PDFDocumento129 páginasLinsley Hood Class PDFBenedekEduardAún no hay calificaciones
- Zapco I 600Documento42 páginasZapco I 600Edgar Perez0% (1)
- TI UC3906 Application Note-slua115-U104Documento12 páginasTI UC3906 Application Note-slua115-U104spidyheroAún no hay calificaciones
- Semiconductor Physics MCQ'SDocumento9 páginasSemiconductor Physics MCQ'SGuruKPOAún no hay calificaciones
- SonarDocumento323 páginasSonarDhimas Afihandarin100% (1)
- Low, High, and Band Pass Butterworth Filters: Experiment-428 SDocumento14 páginasLow, High, and Band Pass Butterworth Filters: Experiment-428 SBharat Chandra MaradaAún no hay calificaciones
- Data Sheet Ads1292rDocumento69 páginasData Sheet Ads1292rKaha SyawalAún no hay calificaciones
- WWII Radar & Comm EquipmentDocumento62 páginasWWII Radar & Comm EquipmentCAP History Library100% (4)
- Viper 100 ADocumento31 páginasViper 100 AvasilesicoeAún no hay calificaciones
- Brochure ICS Repeater (20W) WCDMADocumento3 páginasBrochure ICS Repeater (20W) WCDMAHoàng Anh DũngAún no hay calificaciones
- Tda 1013Documento11 páginasTda 1013Marin MarinescuAún no hay calificaciones
- Waite A D Sonar For Practising EngineersDocumento323 páginasWaite A D Sonar For Practising Engineerssea100% (1)
- LNF-LNC65 115waDocumento4 páginasLNF-LNC65 115waBenjamín Varela UmbralAún no hay calificaciones
- 1.what Are The Desirable Pulse Characteristics and The Factors That Govern Them in A Radar System?Documento10 páginas1.what Are The Desirable Pulse Characteristics and The Factors That Govern Them in A Radar System?allinonemp3_comAún no hay calificaciones
- TNPSC AE 2012 Electrical Question Paper with KeyDocumento9 páginasTNPSC AE 2012 Electrical Question Paper with Keythivya100% (1)
- Opamp-Topologies (Compatibility Mode)Documento239 páginasOpamp-Topologies (Compatibility Mode)Anshul JainAún no hay calificaciones
- PHY PROJ - SynopsisDocumento13 páginasPHY PROJ - SynopsisPiyush HarlalkaAún no hay calificaciones
- OP27Documento20 páginasOP27Asif HameedAún no hay calificaciones
- Audio Precision ATS-1 ManualDocumento161 páginasAudio Precision ATS-1 Manualdacs6417Aún no hay calificaciones
- LF351 Wide Bandwidth JFET Input Operational Amplifier: Literature Number: SNOSBH2Documento14 páginasLF351 Wide Bandwidth JFET Input Operational Amplifier: Literature Number: SNOSBH2elettroiceAún no hay calificaciones