También podría gustarte
- RADIATION SAFETY FUNDAMENTALSDocumento69 páginasRADIATION SAFETY FUNDAMENTALSJay Lawson100% (1)
- Stabilization of A Model Rocket PDFDocumento5 páginasStabilization of A Model Rocket PDFRiddhijit ChattopadhyayAún no hay calificaciones
- Earthing Substation Earthing Guide Central NetworksDocumento12 páginasEarthing Substation Earthing Guide Central Networksshahkhan552000100% (1)
- G 26 Building Using ETABS 1673077361Documento68 páginasG 26 Building Using ETABS 1673077361md hussainAún no hay calificaciones
- Tennis BiomechanicsDocumento14 páginasTennis BiomechanicsΒασίλης Παπατσάς100% (1)
- Drone Project: Physics 118 - Final ReportDocumento13 páginasDrone Project: Physics 118 - Final ReportMahdi MiriAún no hay calificaciones
- Design and Development of A Robotic Drone A Drover.Documento14 páginasDesign and Development of A Robotic Drone A Drover.IJRASETPublicationsAún no hay calificaciones
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocumento10 páginasDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamAún no hay calificaciones
- ADDC Construction QuestionairesDocumento19 páginasADDC Construction QuestionairesUsman Arif100% (1)
- GSM Based Arial Photography Using Remote Flying RobotDocumento4 páginasGSM Based Arial Photography Using Remote Flying RobotseventhsensegroupAún no hay calificaciones
- Water Trash CollectorDocumento3 páginasWater Trash CollectorInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- System Design and Implementation of Autonomous Underwater Vehicle "Matsya"Documento9 páginasSystem Design and Implementation of Autonomous Underwater Vehicle "Matsya"RAVI KATTAKWALAún no hay calificaciones
- Rutgers IEEE Student Branch 2011 IGVC team reportDocumento15 páginasRutgers IEEE Student Branch 2011 IGVC team reportKenDaniswaraAún no hay calificaciones
- Design and Implementation of An Autonomous Underwater Vehicle Kauro'Documento5 páginasDesign and Implementation of An Autonomous Underwater Vehicle Kauro'Ghazal IraniAún no hay calificaciones
- RaDMI 2014Documento17 páginasRaDMI 2014Shin Han NxtAún no hay calificaciones
- Team Nirma AUV, Unmanned Underwater Systems.docxDocumento10 páginasTeam Nirma AUV, Unmanned Underwater Systems.docxsameersam18600Aún no hay calificaciones
- Robosub Design Document Matsya2.0Documento8 páginasRobosub Design Document Matsya2.0pi194043Aún no hay calificaciones
- Iit Kanpur AuvDocumento20 páginasIit Kanpur AuvKoushik Ch 19BME1186100% (1)
- Brochure DTU-AUV - 230607 - 230138Documento26 páginasBrochure DTU-AUV - 230607 - 230138Ishpreet SinghAún no hay calificaciones
- Design Report For The White Russian Unmanned Ground Vehicle: York College of PennsylvaniaDocumento17 páginasDesign Report For The White Russian Unmanned Ground Vehicle: York College of Pennsylvaniasteve4ovenAún no hay calificaciones
- UTD Autonomous Underwater Vehicle: Michael Giambalvo, Ed Paradis, Eric SumnerDocumento7 páginasUTD Autonomous Underwater Vehicle: Michael Giambalvo, Ed Paradis, Eric SumnernntoolAún no hay calificaciones
- RF Controlled Solar Panel Based Robotic VehicleDocumento6 páginasRF Controlled Solar Panel Based Robotic VehicleMohan Babu AAún no hay calificaciones
- Maze Solving Quad Rotor PDFDocumento18 páginasMaze Solving Quad Rotor PDFVartolomeiDumitruAún no hay calificaciones
- RaDMI 2014Documento10 páginasRaDMI 2014Shin Han NxtAún no hay calificaciones
- Design and Static Structural Analysis of A QuadcopterDocumento4 páginasDesign and Static Structural Analysis of A QuadcopterMohammed Ali Al-shaleliAún no hay calificaciones
- BEARCAT Cub Design ReportDocumento16 páginasBEARCAT Cub Design ReportMohd Sazli SaadAún no hay calificaciones
- Bearcat Cub Robot: Design ReportDocumento16 páginasBearcat Cub Robot: Design ReportMohd Sazli SaadAún no hay calificaciones
- Ultra-Lightweight Autonomous Solar Airplane for Continuous FlightDocumento12 páginasUltra-Lightweight Autonomous Solar Airplane for Continuous FlightAndrei BadulescuAún no hay calificaciones
- Android Based Advanced Car Lifting System Using Bluetooth: August 2017Documento6 páginasAndroid Based Advanced Car Lifting System Using Bluetooth: August 2017Just4 FuntechAún no hay calificaciones
- Developing A Quadcopter Frame and Its Structural AnalysisDocumento6 páginasDeveloping A Quadcopter Frame and Its Structural AnalysisInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- CPS & Chasis DynoDocumento8 páginasCPS & Chasis Dynothomason mikeAún no hay calificaciones
- Design and construction of a drone with GPS tracking, collision avoidance and object trackingDocumento4 páginasDesign and construction of a drone with GPS tracking, collision avoidance and object trackingLarry Nelson BorbaAún no hay calificaciones
- ORCA-2: Old Dog, New TricksDocumento10 páginasORCA-2: Old Dog, New TricksMaciek OlszowskiAún no hay calificaciones
- Unmanned Ground Vehicle With NI LabVIEW Using myRIODocumento6 páginasUnmanned Ground Vehicle With NI LabVIEW Using myRIOGRD JournalsAún no hay calificaciones
- A Complete Survey On Onborad Computers Microcontroller Selection For Icube2 CUBESATDocumento5 páginasA Complete Survey On Onborad Computers Microcontroller Selection For Icube2 CUBESATZammad AhmadAún no hay calificaciones
- Abstracts / JSAE Review 18 (1997) 185-209Documento1 páginaAbstracts / JSAE Review 18 (1997) 185-209Dhawadi MahdiAún no hay calificaciones
- Practical Development of An Experimental PDFDocumento9 páginasPractical Development of An Experimental PDFharold medina martinezAún no hay calificaciones
- Design and Implementation of Cartesian RobotDocumento6 páginasDesign and Implementation of Cartesian RobotSang VũAún no hay calificaciones
- Art:10.1007/s00170 007 1024 XDocumento7 páginasArt:10.1007/s00170 007 1024 XMichael WareAún no hay calificaciones
- Indication of Brake Failure by Using IR SensorDocumento3 páginasIndication of Brake Failure by Using IR SensormahendranAún no hay calificaciones
- PayloadDocumento4 páginasPayloadXabi AdinAún no hay calificaciones
- Eco Friendly Electric Scooter For Energy Consumption: G. Priya, M.TechDocumento12 páginasEco Friendly Electric Scooter For Energy Consumption: G. Priya, M.TechGautham NAún no hay calificaciones
- Design of Controller Board For A Lunar Rover: Electronic Basic ThesisDocumento24 páginasDesign of Controller Board For A Lunar Rover: Electronic Basic ThesisMuhammad AhsanAún no hay calificaciones
- Design and Fabrication of Self Balancing Bike Using Gyroscopic EffectDocumento6 páginasDesign and Fabrication of Self Balancing Bike Using Gyroscopic EffectRoshan BahadurAún no hay calificaciones
- Designing a Solar-Powered Pond Cleaning BoatDocumento13 páginasDesigning a Solar-Powered Pond Cleaning BoatAVINASH KUMARAún no hay calificaciones
- Gujarat Technological University: Ac Motor ControllerDocumento17 páginasGujarat Technological University: Ac Motor ControllerEngineers worldAún no hay calificaciones
- CCTV Camera Controller Simulation Using Arduino Uno and JoystickDocumento10 páginasCCTV Camera Controller Simulation Using Arduino Uno and JoystickEnache AlinAún no hay calificaciones
- Cargo Delivery System With Drone: Gazi University Engineering Faculty Electrical-Electronics Engineering DepartmentDocumento44 páginasCargo Delivery System With Drone: Gazi University Engineering Faculty Electrical-Electronics Engineering DepartmentGöktuğ AlbayrakAún no hay calificaciones
- Design and fabrication of AGVDocumento6 páginasDesign and fabrication of AGVMICHEL RAJ MechAún no hay calificaciones
- EC P73 Seminar Report on Autonomous VehiclesDocumento30 páginasEC P73 Seminar Report on Autonomous VehiclesUdhayakumar GAún no hay calificaciones
- Quadcopter Design, Construction and Testing ExplainedDocumento8 páginasQuadcopter Design, Construction and Testing ExplainedashokkumarAún no hay calificaciones
- Esda 2010 M DogruDocumento7 páginasEsda 2010 M DogruVăn Hiếu NguyễnAún no hay calificaciones
- 12V DC Electric Car JackDocumento4 páginas12V DC Electric Car Jack2349 Rohit Ramesh GorivaleAún no hay calificaciones
- ConferencePaper PDFDocumento8 páginasConferencePaper PDFPrayitno FidiantoroAún no hay calificaciones
- Effi CycleDocumento6 páginasEffi CycleHar ShaAún no hay calificaciones
- Electric Skateboard Incorporating Foot Operated Ackerman Steering SystemDocumento7 páginasElectric Skateboard Incorporating Foot Operated Ackerman Steering SystemInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Image Processing Safety Assessment Ferrer2013Documento6 páginasImage Processing Safety Assessment Ferrer2013Utsa RashiqueAún no hay calificaciones
- Design of ATV PartsDocumento20 páginasDesign of ATV PartsAkash HiremathAún no hay calificaciones
- 12.solar Power Based Optimal Battery Charging Mechanism Using Microcontroller in Robotic VehicleDocumento5 páginas12.solar Power Based Optimal Battery Charging Mechanism Using Microcontroller in Robotic VehicleSanthosh KumarAún no hay calificaciones
- Design and Construction of An Underwater Robot: September 2017Documento5 páginasDesign and Construction of An Underwater Robot: September 2017Kenneth UtiAún no hay calificaciones
- Using A High-Speed Mini-PC To Control An Autonomous Underwater VehicleDocumento13 páginasUsing A High-Speed Mini-PC To Control An Autonomous Underwater VehicleLu PatyAún no hay calificaciones
- Automated Guided Vehicle For Phsically HDocumento8 páginasAutomated Guided Vehicle For Phsically HDanil KhardniAún no hay calificaciones
- ReportDocumento5 páginasReportapi-281316772Aún no hay calificaciones
- Effortless Personal TransporterDocumento6 páginasEffortless Personal TransporterIJRASETPublicationsAún no hay calificaciones
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipDe EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipAún no hay calificaciones
- POLIOMYELITISDocumento26 páginasPOLIOMYELITISIzhra Margate100% (1)
- AMYLOIDOSISDocumento22 páginasAMYLOIDOSISMohan ChoudharyAún no hay calificaciones
- Kingspan Spectrum™: Premium Organic Coating SystemDocumento4 páginasKingspan Spectrum™: Premium Organic Coating SystemNikolaAún no hay calificaciones
- Manual Del GVMapper v3 3 PDFDocumento102 páginasManual Del GVMapper v3 3 PDFguanatosAún no hay calificaciones
- PC Poles: DescriptionDocumento2 páginasPC Poles: DescriptionSantoso SantAún no hay calificaciones
- SC Earthquake GuideDocumento8 páginasSC Earthquake GuideNevin SmithAún no hay calificaciones
- TP5 W9 S9 R0Documento2 páginasTP5 W9 S9 R0DickiEffendy0% (1)
- 4 Ideal Models of Engine CyclesDocumento23 páginas4 Ideal Models of Engine CyclesSyedAún no hay calificaciones
- Gerovital anti-aging skin care product guideDocumento10 páginasGerovital anti-aging skin care product guideכרמן גאורגיהAún no hay calificaciones
- Is Revalida ExamDocumento11 páginasIs Revalida ExamRodriguez, Jhe-ann M.Aún no hay calificaciones
- Dahua Pfa130 e Korisnicko Uputstvo EngleskiDocumento5 páginasDahua Pfa130 e Korisnicko Uputstvo EngleskiSaša CucakAún no hay calificaciones
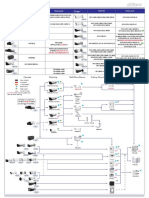
- Cdd153167-Samsung Un32d6500vf Un32 40 46 55d6400uf 6420uf 6450uf 6500vf 6900wf Chassis U63a SM PDFDocumento87 páginasCdd153167-Samsung Un32d6500vf Un32 40 46 55d6400uf 6420uf 6450uf 6500vf 6900wf Chassis U63a SM PDFMilciades MurilloAún no hay calificaciones
- Poultry DiseasesDocumento5 páginasPoultry DiseasesAnjum IslamAún no hay calificaciones
- Pump Course Material Chapter 2Documento16 páginasPump Course Material Chapter 2engr victorAún no hay calificaciones
- Surface Hardening enDocumento20 páginasSurface Hardening engtm1207Aún no hay calificaciones
- DGPS Sensor JLR-4331W Instruction ManualDocumento42 páginasDGPS Sensor JLR-4331W Instruction ManualantonioAún no hay calificaciones
- 2290 PDFDocumento222 páginas2290 PDFmittupatel190785Aún no hay calificaciones
- Hedging Techniques in Academic WritingDocumento11 páginasHedging Techniques in Academic WritingÛbř ÖňAún no hay calificaciones
- Mycbseguide: Cbse Class 10 Social Science Sample Paper - 08 (MCQ Based)Documento10 páginasMycbseguide: Cbse Class 10 Social Science Sample Paper - 08 (MCQ Based)Abdul MuqsitAún no hay calificaciones
- SAMMAJIVA - VOLUME 1, NO. 3, September 2023 Hal 235-250Documento16 páginasSAMMAJIVA - VOLUME 1, NO. 3, September 2023 Hal 235-250Nur Zein IzdiharAún no hay calificaciones
- Mfz-Odv065r15j DS 1-0-0 PDFDocumento1 páginaMfz-Odv065r15j DS 1-0-0 PDFelxsoonAún no hay calificaciones
- 10risk Assessment and ComahDocumento25 páginas10risk Assessment and ComahHansraj RahulAún no hay calificaciones
- The Creators College of Science & Commerce: 1 TermDocumento2 páginasThe Creators College of Science & Commerce: 1 TermJhangir Awan33% (3)
- EiaDocumento14 páginasEiaRamir FamorcanAún no hay calificaciones
- LogiquidsDocumento2 páginasLogiquidsAloma FonsecaAún no hay calificaciones